一种Vienna整流器的模型预测电流控制方法与流程
本发明属于电力电子变流控制,涉及一种vienna整流器的模型预测电流控制方法,尤其是基于超螺旋滑模控制器和龙伯格观测器的vienna整流器的模型预测电流控制方法。
背景技术:
1、目前,滑模变结构控制方法与模型预测控制方法在电力电子领域得到了广泛的关注和研究。滑模控制有着结构简单,鲁棒性强,收敛速度快等优点被广泛应用,将其用在vienna整流器的电压环可以保证整流电压的稳定;模型预测控制因其原理简单,响应快速,易于实现多目标优化等优点受到学界广泛关注,用在vienna整流器的电流环可以很快地跟踪上电压环输出的给定电流。现有方案中常用到滑模控制与模型预测控制这两种控制方案,但都只采用其中一种作为控制手段。传统滑模控制存在滑模面设计和趋近律构造复杂、抖振等问题,模型预测控制也存在着vienna整流器工作在风力、光伏发电等复杂工况下带来的鲁棒性问题。
技术实现思路
1、本发明的目的在于提供一种vienna整流器的模型预测电流控制方法,在外环基于超螺旋滑模电压控制与内环基于龙伯格观测器的预测电流控制级联结构中,融合预测模型控制与高阶滑模控制二者的优点,从而实现系统响应的鲁棒性与快速性。
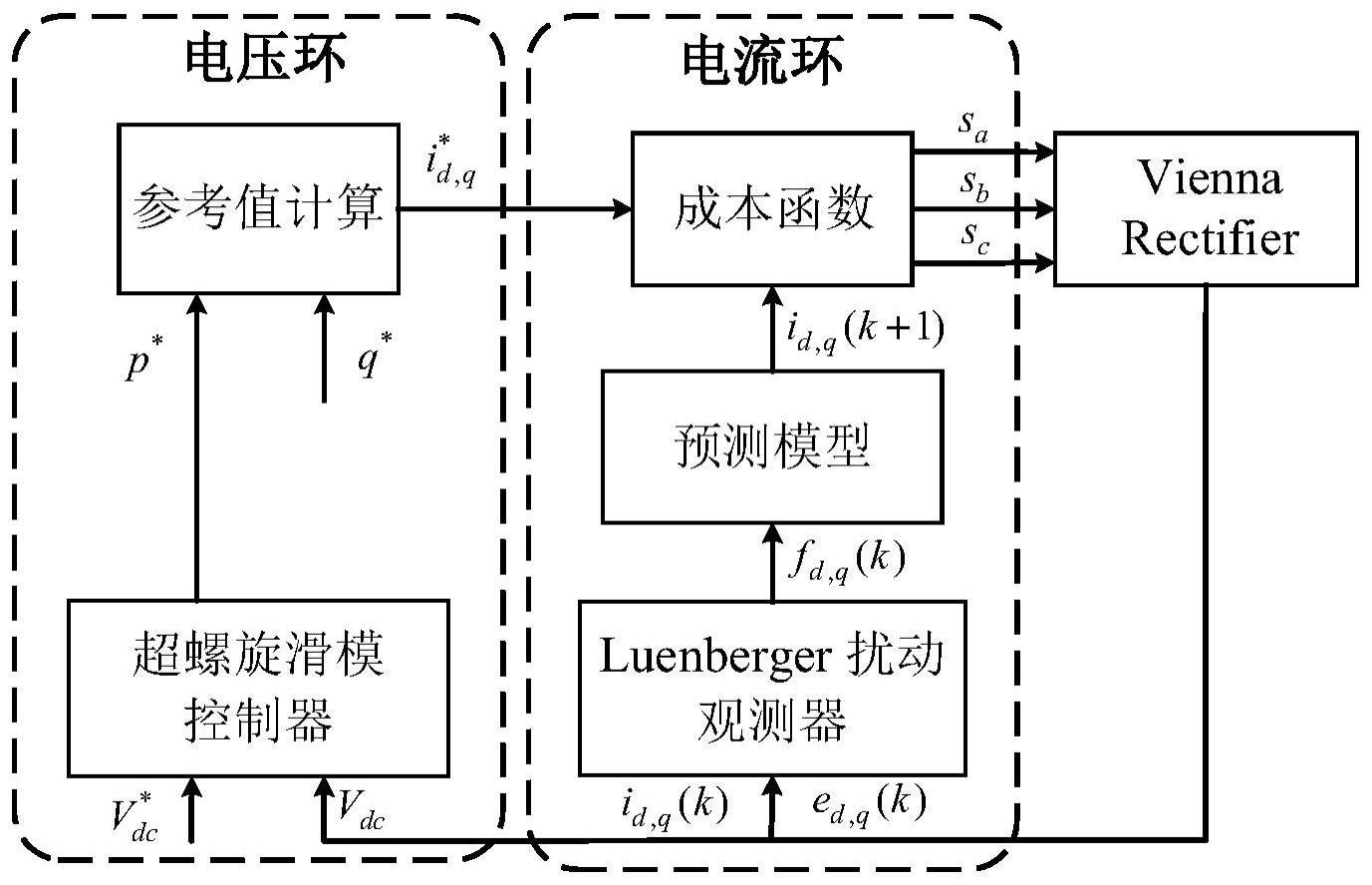
2、本发明一种vienna整流器的模型预测电流控制方法,设计外环基于超螺旋滑模电压控制器,内环基于龙伯格扰动观测器的模型预测电流控制器的级联控制结构,包括如下步骤:
3、步骤1、根据vienna整流器电压环模型设计超螺旋滑模控制器进行vienna整流器的电压环控制,将参考母线电压平方项与实际母线电压平方项的误差信号送入超螺旋控制器中,获得有功功率参考值,无功功率参考值在超螺旋滑模电压控制器中进行给定;
4、步骤2、在d-q电流坐标系下,建立龙伯格观测器,将龙伯格观测器在线估计的扰动值补偿到模型预测电流控制器中,遍历寻优后得到最优电压矢量。
5、该超螺旋滑模电压控制器由如下步骤设计得到:
6、(1)建立vienna整流器电压环模型:
7、
8、其中,vdc为直流侧电压,id和iq为网侧电流在d-q轴上的分量,idc为负载电流、sd和sq为控制信号;
9、(2)将电压环模型改写为:
10、
11、其中,p=edid+eqiq、ed和eq分别为网侧电压在d-q轴上的分量,d=2vdcidc;
12、(3)选择电压的偏差信号作为滑模面,从而将参考母线电压平方项与实际母线电压平方项的误差信号送入超螺旋滑模控制器中:
13、s0=z*-z (3)
14、其中,vdc*为参考电压,
15、(4)确定滑模面与电压环模型的相对阶:
16、
17、根据相对阶的定义,此时滑模面与电压环模型的相对阶为1;
18、(5)根据超螺旋滑模的特性,当滑模面与电压环模型的相对阶为1时,直接得出超螺旋滑模电压控制器输出有功功率参考值p*的表达式为:
19、p*=-λ0|s0|0.5 sign(s0)-÷w0sign(s0)dt (4)
20、其中,λ0、w0分别为超螺旋滑模电压控制器中的可调参数。
21、所述龙伯格观测器设计如下:
22、(1)建立d-q电流坐标系下电流环数学模型:
23、
24、其中,ed和eq分别为网侧电压在d-q轴上的分量,l为系统输入电感,r为等效电阻,ω为电网角频率,id和iq为网侧电流在d-q轴上的分量,ud和uq为电压矢量在d-q轴下的分量,fd和fq为系统扰动量在d-q轴下的分量;
25、(2)电流方程的扰动量表示为:
26、
27、其中,δr、δl分别为实际电阻值、电感值与标称值间的差值;
28、(3)电流环数学模型的状态方程表示为:
29、
30、其中x=[id iq fd fq]t,y=[id iq id iq]t,u=[ed-eq ud-uq]t,
31、
32、(4)根据电流环数学模型的状态方程得出龙伯格观测器的表达式为:
33、
34、其中,为状态变量估计值,通过调整l1,l2的值,可以使龙伯格观测器达到稳定,此时,观测值与实际值相等;
35、所述模型预测电流控制器设计如下:
36、(1)将给定功率转换成给定电流进行预测电压控制,转换公式表示为:
37、
38、其中,和是电流参考值在d-q轴下的分量;p*是有功功率参考值,q*是无功功率参考值;
39、(2)欧拉前向公式为:
40、
41、其中,ts为系统控制周期,z(k)、z(k+1)为在k时刻与k+1时刻的系统状态;
42、(3)根据欧拉前向公式建立vienna整流器离散的预测模型:
43、
44、(4)建立包含电流和中电点位差的成本函数:
45、
46、其中,γ为成本函数的权重系数,vc1(k+1)、vc2(k+1)分别为上下电容电压在k+1时刻的值;
47、(5)以成本函数为评价标准,对所有开关状态进行遍历优化,选择最优开关状态,使系统输入电流尽可能准确地跟踪给定电流,从而在遍历寻优后得到最优电压矢量。
48、由于vienna整流器控制结构是内外环级联的形式,内外环对控制器的要求并不相同,本发明在电压控制器的设计中,利用整流器电压模型构建超螺旋滑模电压控制器结构,在保持传统滑模控制鲁棒性的同时削弱了抖振;在d-q坐标系下的电流控制器的设计中,将龙伯格观测器融入模型预测控制结构,建立基于龙伯格观测器的预测电流控制结构,不仅保留了模型预测控制响应速度快的优点,同时避免了由于参数变化导致的模型精度问题。该外环基于超螺旋滑模电压控制与内环基于龙伯格观测器的预测电流控制级联结构,在结构上,将模型预测控制与高阶滑模控制相结合,综合了两种控制方法的优点;在功能上,外环超螺旋滑模电压控制器,可以抑制干扰,具有良好的鲁棒性,能够很好地稳定母线电压;内环通常对控制器带宽的要求较高,故基于龙伯格观测器的预测电流控制器能快速跟踪外环给定,提高整个系统的响应速度,实现系统响应的鲁棒性与快速性。
技术特征:
1.一种vienna整流器的模型预测电流控制方法,其特征在于:设计外环基于超螺旋滑模电压控制器,内环基于龙伯格扰动观测器的模型预测电流控制器的级联控制结构,包括如下步骤:
2.根据权利要求1所述的一种vienna整流器的模型预测电流控制方法,其特征在于:该超螺旋滑模电压控制器由如下步骤设计得到:
3.根据权利要求1所述的一种vienna整流器的模型预测电流控制方法,其特征在于:所述龙伯格观测器设计如下:
技术总结
本发明一种Vienna整流器的模型预测电流控制方法,设计外环基于超螺旋滑模电压控制器,内环基于龙伯格扰动观测器的模型预测电流控制器的级联控制结构,根据Vienna整流器电压环模型设计超螺旋滑模控制器进行Vienna整流器的电压环控制,将参考母线电压平方项与实际母线电压平方项的误差信号送入超螺旋控制器中,获得有功功率参考值,无功功率参考值在超螺旋滑模电压控制器中进行给定;在d‑q电流坐标系下,建立龙伯格观测器,将龙伯格观测器在线估计的扰动值补偿到模型预测电流控制器中,遍历寻优后得到最优电压矢量。本发明将模型预测控制与高阶滑模控制相结合,综合两种控制方法的优点;可以抑制干扰,具有良好的鲁棒性,提高整个系统的响应速度。
技术研发人员:于新红,陈军希,汪凤翔,杨奥,黄东晓,柯栋梁
受保护的技术使用者:闽都创新实验室
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!