一种用于电力线除冰的两栖机器人及除冰方法与流程
本发明涉及电力巡线,尤其涉及一种用于电力线除冰的两栖机器人及除冰方法。
背景技术:
1、目前,随着电力传输的要求不断提高,输电等级越来越高,高压/超高压巡线维护作业对于电网系统的安全性、稳定性和效率提升的作用尤为重要。输电线路所处区域多为自然环境恶劣、交通闭塞的野外,电力线在自然环境中长期受到机械拉力、雷击、温度变化、雨雪天气的影响,容易出现塔杆倾斜、线路断股、老化、腐蚀等现象,电力线塔杆上的绝缘子在自然环境中也容易出现损坏,电力线周边树木的生长等,均要求对电力线进行巡检。
2、其中,为了保证供电的可靠性,在寒冷地区或低温季节里,工作人员要定期清除电力线表面的结冰,保证电力线正常使用。而现有的维护清理方式为操作人员利用工具敲击、刮划电力线表面,以使结冰掉落,但是清理效果不好,且操作风险高,常无法全面清理电力线的表面,同时人为的敲击、刮划操作可能损坏电力线。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的是现有除冰方式清理效果不好,操作风险高,且容易损坏电力线的技术问题。
3、(二)技术方案
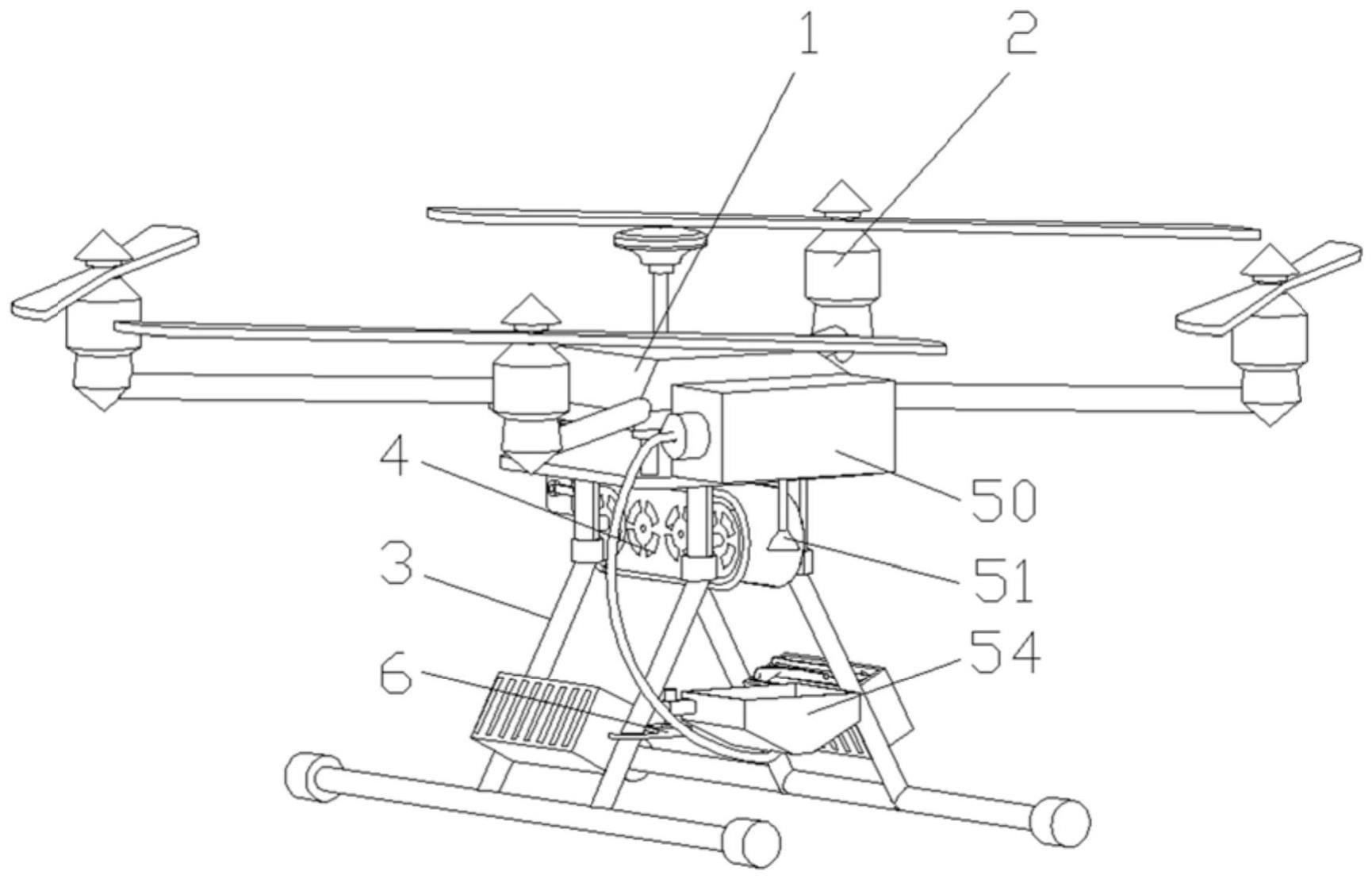
4、为解决上述技术问题,本发明提供了一种用于电力线除冰的两栖机器人,包括机身、飞行单元、起落架、爬线单元以及除冰机构;所述飞行单元设置在所述机身上,以用于实现机器人飞行;所述起落架设置在所述机身下方,以用于实现机器人平稳着陆;所述爬线单元设置在所述机身底部,以用于实现机器人爬线;所述除冰机构位于所述爬线单元一端,以用于实现对电力线的除冰。
5、进一步地,所述除冰机构包括加热水箱、喷洒管、回收导管、水泵以及收集水箱;所述加热水箱设置在所述机身上;所述喷洒管与所述加热水箱连接,且所述喷洒管对应电力线位置设置;所述收集水箱设置在所述起落架上,且所述收集水箱位于所述喷洒管下方;所述收集水箱通过所述回收导管与所述加热水箱连接,且所述回收导管上设置有所述水泵。
6、进一步地,所述加热水箱内设置有加热电阻,所述加热电阻一端通过导线与电力线电性接触,另一端电性连接有高压电容。
7、进一步地,所述加热电阻为加热丝,且所述加热丝呈s形布置在所述加热水箱底部。
8、进一步地,所述喷洒管上设置有电磁阀,所述喷洒管一端设置有喷头。
9、进一步地,所述收集水箱通过旋转装置连接所述起落架,以用于实现所述收集水箱的转动。
10、进一步地,所述旋转装置包括固定端和旋转端,所述固定端设置在所述起落架一侧,所述旋转端设置在所述收集水箱一端,所述固定端上的驱动轴与所述旋转端连接。
11、进一步地,还包括电性连接的姿态控制系统、电机驱动模块、电源模块以及通信模块,所述姿态控制系统包括惯性测量单元和微处理器,以用于实现机器人的飞行或爬线平衡控制。
12、进一步地,还包括摄像头和云台,所述摄像头通过所述云台与所述机身连接,且位于所述爬线单元另一端。
13、第二方面,本发明提供了一种用于电力线除冰的两栖机器人的除冰方法,包括步骤:
14、s1,对加热水箱内注入预备用水;
15、s2,启动飞行单元使机器人到达电力线作业位置;
16、s3,加热电阻一端的导线与电力线电性接触进行取电,在高压电容的作用形成交变电流,使加热电阻对加热水箱内的预备用水进行加热;
17、s4,通过旋转装置使收集水箱位于喷洒管下方;
18、s5,打开电磁阀和水泵,热水从喷洒管流出,对电力线上覆盖的冰块进行融化;
19、s6,融化后的融水通过收集水箱收集,并通过水泵抽到加热水箱进行再利用;
20、s7,启动爬线单元使机器人沿电力线进行巡线。
21、(三)有益效果
22、本发明的上述技术方案具有如下优点:通过机器人代替人工实现了从地面起降到待巡检的电力线,然后通过爬线单元使机器人沿电力线进行巡检,同时通过除冰机构对结冰的电力线进行除冰操作,由于采用热水融冰的方式,相对于传统除冰清理效果好,操作风险低,且不容易损坏电力线,具有较好的应用前景。
技术特征:
1.一种用于电力线除冰的两栖机器人,其特征在于,包括机身、飞行单元、起落架、爬线单元以及除冰机构;
2.根据权利要求1所述的一种用于电力线除冰的两栖机器人,其特征在于,所述除冰机构包括加热水箱、喷洒管、回收导管、水泵以及收集水箱;
3.根据权利要求2所述的一种用于电力线除冰的两栖机器人,其特征在于,所述加热水箱内设置有加热电阻,所述加热电阻一端通过导线与电力线电性接触,另一端电性连接有高压电容。
4.根据权利要求3所述的一种用于电力线除冰的两栖机器人,其特征在于,所述加热电阻为加热丝,且所述加热丝呈s形布置在所述加热水箱底部。
5.根据权利要求2所述的一种用于电力线除冰的两栖机器人,其特征在于,所述喷洒管上设置有电磁阀,所述喷洒管一端设置有喷头。
6.根据权利要求2所述的一种用于电力线除冰的两栖机器人,其特征在于,所述收集水箱通过旋转装置连接所述起落架,以用于实现所述收集水箱的转动。
7.根据权利要求6所述的一种用于电力线除冰的两栖机器人,其特征在于,所述旋转装置包括固定端和旋转端,所述固定端设置在所述起落架一侧,所述旋转端设置在所述收集水箱一端,所述固定端上的驱动轴与所述旋转端连接。
8.根据权利要求1所述的一种用于电力线除冰的两栖机器人,其特征在于,还包括电性连接的姿态控制系统、电机驱动模块、电源模块以及通信模块,所述姿态控制系统包括惯性测量单元和微处理器,以用于实现机器人的飞行或爬线平衡控制。
9.根据权利要求1~8任一项所述的一种用于电力线除冰的两栖机器人,其特征在于,还包括摄像头和云台,所述摄像头通过所述云台与所述机身连接,且位于所述爬线单元另一端。
10.一种用于电力线除冰的两栖机器人的除冰方法,其特征在于,包括步骤:
技术总结
本发明涉及电力巡线技术领域,尤其涉及一种用于电力线除冰的两栖机器人及除冰方法,包括机身、飞行单元、起落架、爬线单元以及除冰机构;所述飞行单元设置在所述机身上,以用于实现机器人飞行;所述起落架设置在所述机身下方,以用于实现机器人平稳着陆;所述爬线单元设置在所述机身底部,以用于实现机器人爬线;所述除冰机构位于所述爬线单元一端,以用于实现对电力线的除冰。本发明通过机器人代替人工实现了从地面起降到待巡检的电力线,然后通过爬线单元使机器人沿电力线进行巡检,同时通过除冰机构对结冰的电力线进行除冰操作,由于采用热水融冰的方式,相对于传统除冰清理效果好,操作风险低,且不容易损坏电力线,具有较好的应用前景。
技术研发人员:王涛
受保护的技术使用者:重庆吉光幻羽科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!