光伏组件的安装方法、装置和安装系统与流程
本申请属于光伏系统领域,尤其涉及一种光伏组件的安装方法、装置和安装系统。
背景技术:
1、家庭及分布式光伏组件被越来越广泛地应用于人们的日常生活中,为提高光伏组件的安装效率,逐渐开始采用自动安装机器人设备进行光伏组件的自动安装。相关技术中,主要通过无人机拍照定位或卫星定位技术进行光伏组件的定位及自动安装,但该方法存在定位偏差和一定的时延性,容易使得光伏组件最终的实际安装位置与预设安装位置出现安装偏差,安装准确度较低。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种光伏组件的安装方法、装置和安装系统,能够显著提高光伏组件的定位精度以及安装准确度,且操作简单易于实现,安装成本较低。
2、第一方面,本申请提供了一种光伏组件的安装方法,该方法包括:
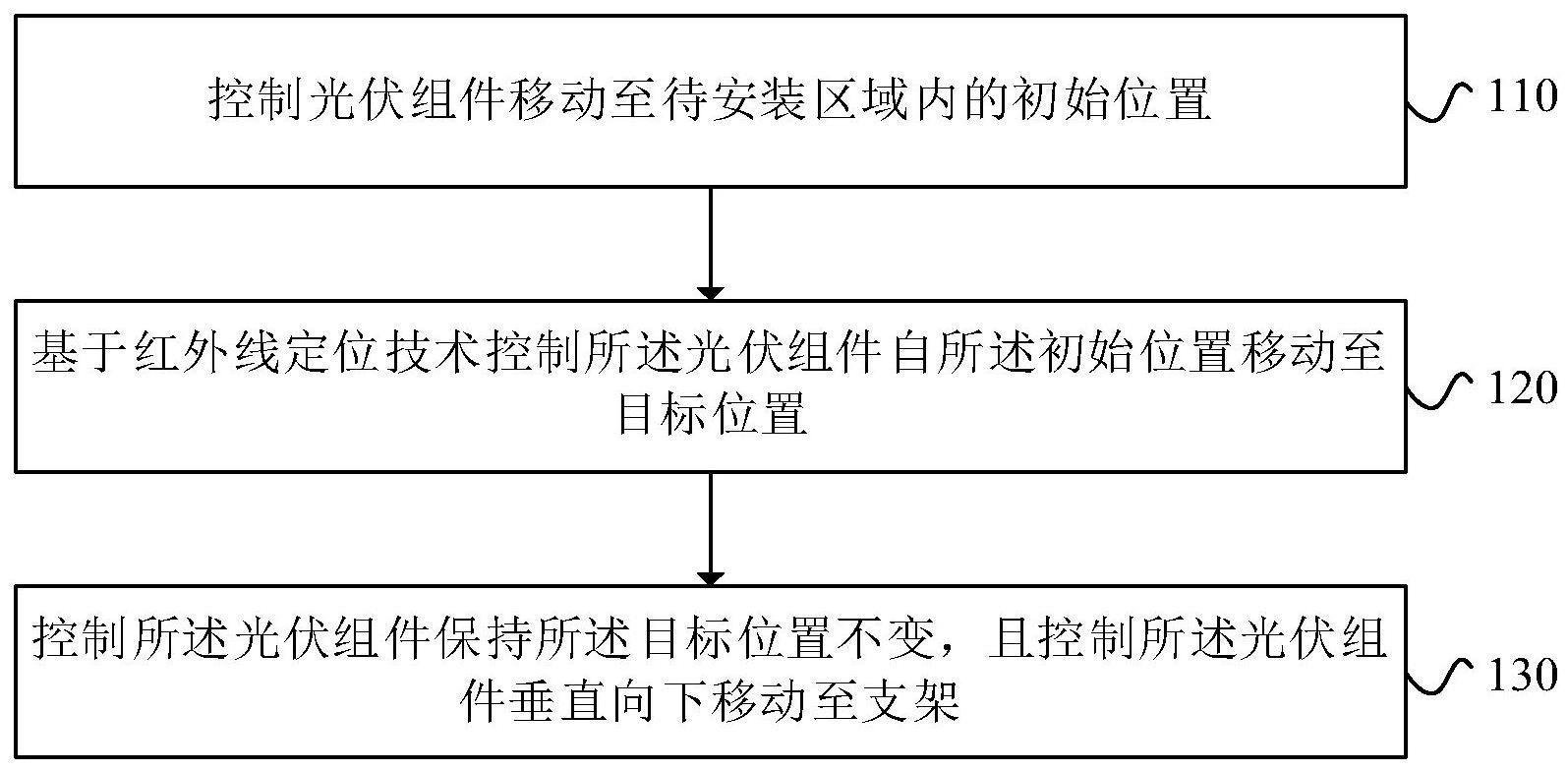
3、控制光伏组件移动至待安装区域内的初始位置;
4、基于红外线定位技术控制所述光伏组件自所述初始位置移动至目标位置;
5、控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架。
6、根据本申请的光伏组件的安装方法,通过在将光伏组件移动至初始位置后,基于红外线定位技术对光伏组件的安装位置进行精确调整,缩小实际安装位置与预设安装位置之间的位移偏差,能够显著提高光伏组件的定位精度以及安装准确度,且操作简单易于实现,安装成本较低,尤其适用于分布式光伏电站的精细化设计情景。
7、根据本申请的一个实施例,所述目标位置处设置有由红外镜头投影于待安装平面的红外光圈,所述红外光圈的轮廓大小与所述光伏组件的轮廓大小一致;所述基于红外线定位技术控制所述光伏组件自所述初始位置移动至目标位置,包括:
8、在所述红外光圈的至少部分被所述光伏组件遮挡的情况下,基于遮挡情况控制所述光伏组件移动直至所述光伏组件的轮廓与所述红外光圈的轮廓全部重合。
9、根据本申请的一个实施例,所述基于遮挡情况控制所述光伏组件移动直至所述光伏组件的轮廓与所述红外光圈的轮廓全部重合,包括:
10、基于所述遮挡情况,确定位移距离和位移方向中的至少一种;
11、基于所述位移距离和所述位移方向中的至少一种,控制所述光伏组件移动直至所述光伏组件的轮廓与所述红外光圈的轮廓全部重合。
12、根据本申请的一个实施例,所述控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架,包括:
13、获取所述光伏组件与设置于所述光伏组件上方的红外传感器之间的实时距离;
14、在所述实时距离不小于目标阈值的情况下,降低所述光伏组件垂直下降的速度直至所述光伏组件移动至所述支架。
15、根据本申请的一个实施例,在所述控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架之前,所述方法还包括:
16、在设置于目标边界处的rfid电子标签读写器识别到所述光伏组件的情况下,基于所述rfid电子标签读写器输出的用于表征所述光伏组件的位置信息,调整所述光伏组件的位置;其中,所述目标边界包括所述待安装区域的边界、所述待安装区域内障碍物边界和红外镜头的移动边界中的至少一种。
17、第二方面,本申请提供了一种光伏组件的安装装置,该装置包括:
18、第一处理模块,用于控制光伏组件移动至待安装区域内的初始位置;
19、第二处理模块,用于基于红外线定位技术控制所述光伏组件自所述初始位置移动至目标位置;
20、第三处理模块,用于控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架。
21、根据本申请的光伏组件的安装装置,通过在将光伏组件移动至初始位置后,基于红外线定位技术对光伏组件的安装位置进行精确调整,缩小实际安装位置与预设安装位置之间的位移偏差,能够显著提高光伏组件的定位精度以及安装准确度,且操作简单易于实现,安装成本较低,尤其适用于分布式光伏电站的精细化设计情景。
22、第三方面,本申请提供了一种安装系统,该系统包括:
23、机器人,所述机器人用于抓取并移动光伏组件;
24、红外定位系统;
25、如第二方面所述的光伏组件的安装装置,所述光伏组件的安装装置分别与所述机器人和所述红外定位系统电连接。
26、第四方面,本申请提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的光伏组件的安装方法。
27、第五方面,本申请提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的光伏组件的安装方法。
28、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
29、通过在将光伏组件移动至初始位置后,基于红外线定位技术对光伏组件的安装位置进行精确调整,缩小实际安装位置与预设安装位置之间的位移偏差,能够显著提高光伏组件的定位精度以及安装准确度,且操作简单易于实现,安装成本较低,尤其适用于分布式光伏电站的精细化设计情景。
30、进一步的,通过在目标位置处投影红外光圈,以基于光伏组件对红外光圈的遮挡情况调整光伏组件至光伏组件的轮廓与红外光圈重合,从而能够准确将光伏组件移动至预设安装位置,操作简单快捷,无滞后性,且定位准确性和精确性均较高。
31、更进一步的,通过设置rfid电子标签和rfid电子标签读写器以实时判断光伏组件与目标边界之间的距离,并在确定存在障碍物的情况下,基于rfid信息进一步控制机器人移动以调整光伏组件的位置,从而有效避免光伏组件在移动过程中与障碍物等边界发生碰撞,避免光伏组件损坏,从而提高安装的稳定性和安全性。
32、再进一步的,通过红外传感器采集光伏组件的实时高度,在基于实时高度实时调整光伏组件距离待安装平面的距离以使得光伏组件移动至预设高度的基础上,进一步基于实时高度调整光伏组件的下降速度,使得在光伏组件接近支架的情况下降低下降速度,以避免光伏组件与支架发生强烈碰撞,避免光伏组件损坏,提高安装的安全性和稳定性。
33、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种光伏组件的安装方法,其特征在于,包括:
2.根据权利要求1所述的光伏组件的安装方法,其特征在于,所述目标位置处设置有由红外镜头投影于待安装平面的红外光圈,所述红外光圈的轮廓大小与所述光伏组件的轮廓大小一致;所述基于红外线定位技术控制所述光伏组件自所述初始位置移动至目标位置,包括:
3.根据权利要求2所述的光伏组件的安装方法,其特征在于,所述基于遮挡情况控制所述光伏组件移动直至所述光伏组件的轮廓与所述红外光圈的轮廓全部重合,包括:
4.根据权利要求1-3任一项所述的光伏组件的安装方法,其特征在于,所述控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架,包括:
5.根据权利要求1-3任一项所述的光伏组件的安装方法,其特征在于,在所述控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架之前,所述方法还包括:
6.一种光伏组件的安装装置,其特征在于,包括:
7.一种安装系统,其特征在于,包括:
8.根据权利要求7所述的安装系统,其特征在于,所述红外定位系统包括红外镜头,所述红外镜头设置于待安装平面的上方,且所述红外镜头在设置平面内可选择性地基于目标步长沿第一方向移动,所述设置平面平行于所述待安装平面;所述红外镜头用于向目标位置处投影红外光圈;所述红外光圈的轮廓大小与所述光伏组件的轮廓大小一致。
9.根据权利要求7所述的安装系统,其特征在于,所述红外定位系统还包括红外传感器,所述红外传感器设置于所述光伏组件的上方且与所述光伏组件的安装装置电连接,所述红外传感器用于采集与所述光伏组件之间的实时距离。
10.根据权利要求7-9任一项所述的安装系统,其特征在于,所述红外定位系统还包括:
11.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-5任一项所述的光伏组件的安装方法。
12.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5任一项所述光伏组件的安装方法。
技术总结
本申请公开了一种光伏组件的安装方法、装置和安装系统,属于光伏系统领域。所述光伏组件的安装方法,包括:控制光伏组件移动至待安装区域内的初始位置;基于红外线定位技术控制所述光伏组件自所述初始位置移动至目标位置;控制所述光伏组件保持所述目标位置不变,且控制所述光伏组件垂直向下移动至支架。本申请的光伏组件的安装方法,通过在将光伏组件移动至初始位置后,基于红外线定位技术对光伏组件的安装位置进行精确调整,缩小实际安装位置与预设安装位置之间的位移偏差,能够显著提高光伏组件的定位精度以及安装准确度,且操作简单易于实现,安装成本较低,尤其适用于分布式光伏电站的精细化设计情景。
技术研发人员:陈建凯,陈朋朋,王伟
受保护的技术使用者:阳光新能源开发股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!