过载随动的自锁电动缸及方法与流程
本发明属于电动缸,具体涉及一种过载随动的自锁电动缸及方法。
背景技术:
1、用于射电望远镜反射面的电动缸要求具有断电自锁能力和过载随动能力,一般实现自锁的方式主要包含机械自锁和电自锁,机械自锁需要用低效率减速器,以损失系统的效率为代价。电自锁一般需要增加电抱闸等额外设备,增加系统用电功耗。这两种自锁方式均无法实现随动功能,且实现成本高,不能满足使用要求。
2、故,目前需要解决现有自锁电动缸的设备复杂且无法过载随动的问题。
技术实现思路
1、本发明的目的在于解决现有自锁电动缸的设备复杂且无法过载随动的问题,提出了一种过载随动的自锁电动缸及方法,设计简单、成本低,功耗低,既可以实现自锁功能,又可以在过载情况下实现随动功能,能够较好的满足特种装备上的特殊电动缸的应用。
2、为达到上述目的,本发明采用如下技术方案:
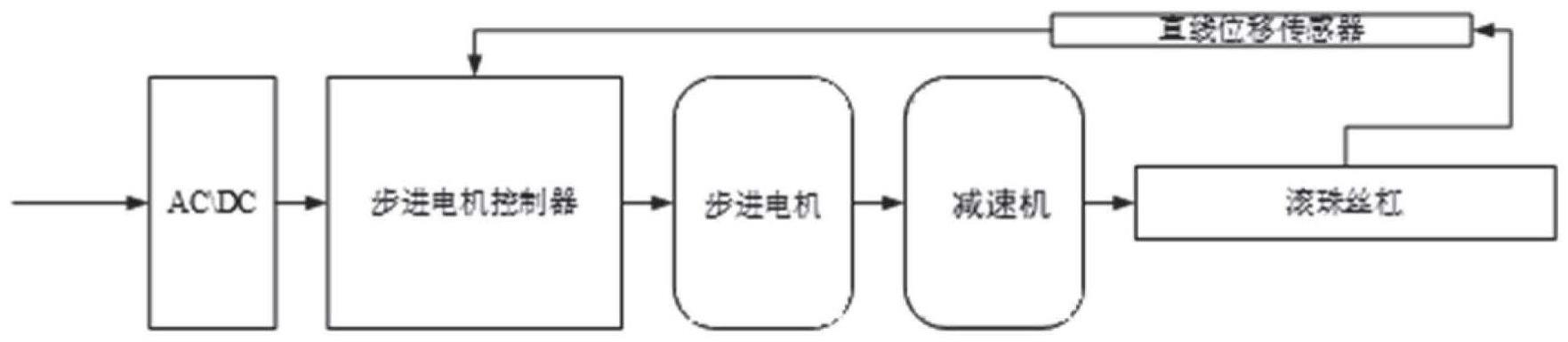
3、一种过载随动的自锁电动缸,包括交流电源,所述交流电源连接ac/dc变换的输入端,所述ac/dc变换的输出端连接步进电机控制器的输入端,所述步进电机控制器的输出端连接步进电机的输入端,所述步进电机的输出端连接减速机的输入端,所述减速机的输出端连接滚珠丝杠,所述滚珠丝杠上安装有直线位移传感器,用于将滚珠丝杠的反馈位移信息送至步进电机控制器。
4、进一步地,所述减速机采用行星减速机。
5、进一步地,其特征在于,所述步进电机采用永磁式步进电机。
6、一种过载随动的自锁电动缸的实现方法,所述电动缸利用步进电机控制器的电动驱动部分短接步进电机的相线,产生短接制动转矩,所述短接制动转矩经过减速机放大产生自锁力,所述电动缸利用自锁力自锁;当电动缸断电时承受的力大于额定载荷,所述承受的力通过步进电机的传动机构传导到步进电机的输出轴,步进电机的转子克服自锁力产生运动,电动缸过载随动。
7、进一步地,所述步进电机控制器的电动驱动部分包括常闭继电器,所述电动缸未通电时,常闭继电器将步进电机的相线短接,电动缸自锁;所述电动缸在通电后,步进电机控制器的控制信号为无效态,当电动缸需要开始动作时,由步进电机控制器的控制信号输出为有效态,此时步进电机解除制动状态,电动缸正常运行,当电动缸需要停止动作时,步进电机控制器将控制信号输出为无效态,步进电机保持制动状态,电动缸停止运行,常闭继电器将步进电机的相线短接,电动缸自锁。
8、进一步地,所述步进电机控制器的电动驱动部分还包括全桥驱动电路、门电路和内部电源;所述全桥驱动电路的驱动信号驱动步进电机;所述门电路的输出端连接常闭继电器的控制端;在断电时,常闭继电器处于导通状态,驱动信号短接;在通电时,门电路控制常闭继电器默认上电无效,常闭继电器处于导通状态,驱动信号短接;所述内部电源的正负极之间连接有电阻。
9、进一步地,所述电阻采用毫欧级大功率电阻,所述步进电机控制器的gpio端连接常闭继电器的控制端,所述常闭继电器与全桥驱动电路并联;所述常闭继电器的输出端与步进电机的相线端连接。
10、进一步地,所述常闭继电器采用常闭固态继电器。
11、进一步地,所述自锁电动缸的自锁力按照减速机的减速比成倍放大。
12、一种射电望远镜反射面系统,使用过载随动的自锁电动缸。
13、与现有技术相比,本发明具有以下有益的技术效果:
14、本发明提供了一种过载随动的自锁电动缸,交流电源经过电源的ac\dc变换,为步进电机控制器提供用于控制步进电机和内部使用的直流电源,步进电机控制器直接控制后端连接的步进电机;自锁力由步进电机和减速机来提供。行星减速机后端连接滚珠丝杠,滚珠丝杠将旋转运动转换成直线运动。滚珠丝杠上安装有用于反馈位移信息的直线位移传感器。直线位移传感器的信号送至步进电机控制器,步进电机控制器根据此信号来精确控制电动缸的运动位移。
15、本发明减速机采用效率较高的行星减速机避免了机械自锁。
16、本发明通过短接步进电机相线产生短接制动转矩实现电动缸的电自锁;设计简单、成本低,且功耗低,节约了时间与经济成本,并可以实现在过载的情况下随动的功能,提高了电动缸系统的可靠性,具有很强的使用价值。
17、本发明电动缸在断电状态下承受比额定载荷更大的力时,这个力通过传动机构传导到步进电机的输出轴,使转子克服了锁紧力,产生了运动,则步进电机由电动机的功能转换成发电机的功能,由于运动速度和位移均有限,电流不会对电机的线圈造成大的影响,电动缸实现了过载随动功能。
18、本发明通过常闭继电器实现步进电机的相线短接,且常闭继电器的控制端可控。当电动缸系统断电时,常闭继电器处于导通状态,通过短接制动转矩实现电动缸电自锁。当电动缸系统运行时,控制常闭继电器处于断开状态,电动缸可正常运行。电动缸运行到位后,控制常闭继电器处于导通状态,通过短接制动转矩实现负载的维持。
19、本发明步进电机控制器的内部电源的正负极之间通过一个毫欧级大功率电阻连接,步进电机内断电前储存的能量在常闭固态继电器闭合后能够通过该毫欧级大功率电阻泄放至负极。
20、本发明常闭继电器采用常闭固态继电器可以抵抗短接瞬间电机线圈所产生的反向电动势的冲击,并且常闭固态继电器的动作短接时间远低于电机的机械时间常数。
21、本发明电动缸的自锁力实际来源于步进电机的永磁体,永磁体的磁场强弱直接影响到自锁力的大小。而输出功率大的步进电机永磁体磁场强。另外,电机的自锁力将按减速机的减速比成倍放大。更换不同规格的步进电机和不同减速比的减速器来调节自锁力,简单且成本低。
技术特征:
1.一种过载随动的自锁电动缸,其特征在于,包括交流电源,所述交流电源连接ac/dc变换的输入端,所述ac/dc变换的输出端连接步进电机控制器的输入端,所述步进电机控制器的输出端连接步进电机的输入端,所述步进电机的输出端连接减速机的输入端,所述减速机的输出端连接滚珠丝杠,所述滚珠丝杠上安装有直线位移传感器,用于将滚珠丝杠的反馈位移信息送至步进电机控制器。
2.根据权利要求1所述的一种过载随动的自锁电动缸,其特征在于,所述减速机采用行星减速机。
3.根据权利要求1所述的一种过载随动的自锁电动缸,其特征在于,所述步进电机采用永磁式步进电机。
4.一种权利要求1-3任一项中所述的过载随动的自锁电动缸的实现方法,其特征在于,所述电动缸利用步进电机控制器的电动驱动部分短接步进电机的相线,产生短接制动转矩,所述短接制动转矩经过减速机放大产生自锁力,所述电动缸利用自锁力自锁;当电动缸断电时承受的力大于额定载荷,所述承受的力通过步进电机的传动机构传导到步进电机的输出轴,步进电机的转子克服自锁力产生运动,电动缸过载随动。
5.根据权利要求4所述的一种过载随动的自锁电动缸的实现方法,其特征在于,所述步进电机控制器的电动驱动部分包括常闭继电器,所述电动缸未通电时,常闭继电器将步进电机的相线短接,电动缸自锁;所述电动缸在通电后,步进电机控制器的控制信号为无效态,当电动缸需要开始动作时,由步进电机控制器的控制信号输出为有效态,此时步进电机解除制动状态,电动缸正常运行,当电动缸需要停止动作时,步进电机控制器将控制信号输出为无效态,步进电机保持制动状态,电动缸停止运行,常闭继电器将步进电机的相线短接,电动缸自锁。
6.根据权利要求4所述的一种过载随动的自锁电动缸的实现方法,其特征在于,所述步进电机控制器的电动驱动部分还包括全桥驱动电路、门电路和内部电源;所述全桥驱动电路的驱动信号驱动步进电机;所述门电路的输出端连接常闭继电器的控制端;在断电时,常闭继电器处于导通状态,驱动信号短接;在通电时,门电路控制常闭继电器默认上电无效,常闭继电器处于导通状态,驱动信号短接;所述内部电源的正负极之间连接有电阻。
7.根据权利要求4所述的一种过载随动的自锁电动缸的实现方法,其特征在于,所述电阻采用毫欧级大功率电阻,所述步进电机控制器的gpio端连接常闭继电器的控制端,所述常闭继电器与全桥驱动电路并联;所述常闭继电器的输出端与步进电机的相线端连接。
8.根据权利要求4所述的一种过载随动的自锁电动缸的实现方法,其特征在于,所述常闭继电器采用常闭固态继电器。
9.根据权利要求4所述的一种过载随动的自锁电动缸的实现方法,其特征在于,所述自锁电动缸的自锁力按照减速机的减速比成倍放大。
技术总结
本发明公开了一种过载随动的自锁电动缸及方法,步进电机控制器根据直线位移传感器的信号来精确控制电动缸的运动位移,通过可控的常闭继电器实现步进电机线圈输出的短接,产生的短接制动转矩实现电动缸的自锁。当系统断电时,常闭继电器处于导通状态,通过短接制动转矩实现电动缸电自锁。当系统运行时,控制常闭继电器处于断开状态,电动缸可正常运行。电动缸运行到位后,控制常闭继电器处于导通状态,通过短接制动转矩实现负载的维持。本发明设计简单、成本低,且功耗低,节约了时间与经济成本,并可以实现在过载的情况下随动的功能,提高了电动缸系统的可靠性,具有很强的使用价值。
技术研发人员:彭海波,王晓洁,马元元,李宁,程杰,尚思瑶
受保护的技术使用者:西安微电子技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!