悬臂式CMG外框控制器动态闭环补偿参数设计方法及系统与流程
本发明属于空间卫星姿态轨道控制,尤其涉及一种悬臂式cmg外框控制器动态闭环补偿参数设计方法及系统。
背景技术:
1、悬臂式控制力矩陀螺应用在整星姿态控制时,会受到整星微振动干扰的影响,为了减少这种影响,往往采用安装隔振器装置,但这种解决方式导致控制力矩陀螺安装局部固有频率降低,容易与外框架产生共振现象,这不仅降低了整星姿态控制的精度,而且对控制力矩陀螺系统产生危害。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种悬臂式cmg外框控制器动态闭环补偿参数设计方法及系统,具有可在线改变闭环补偿参数及避免与整星结构发生耦合共振现象的优点,使产品性能得到提升。
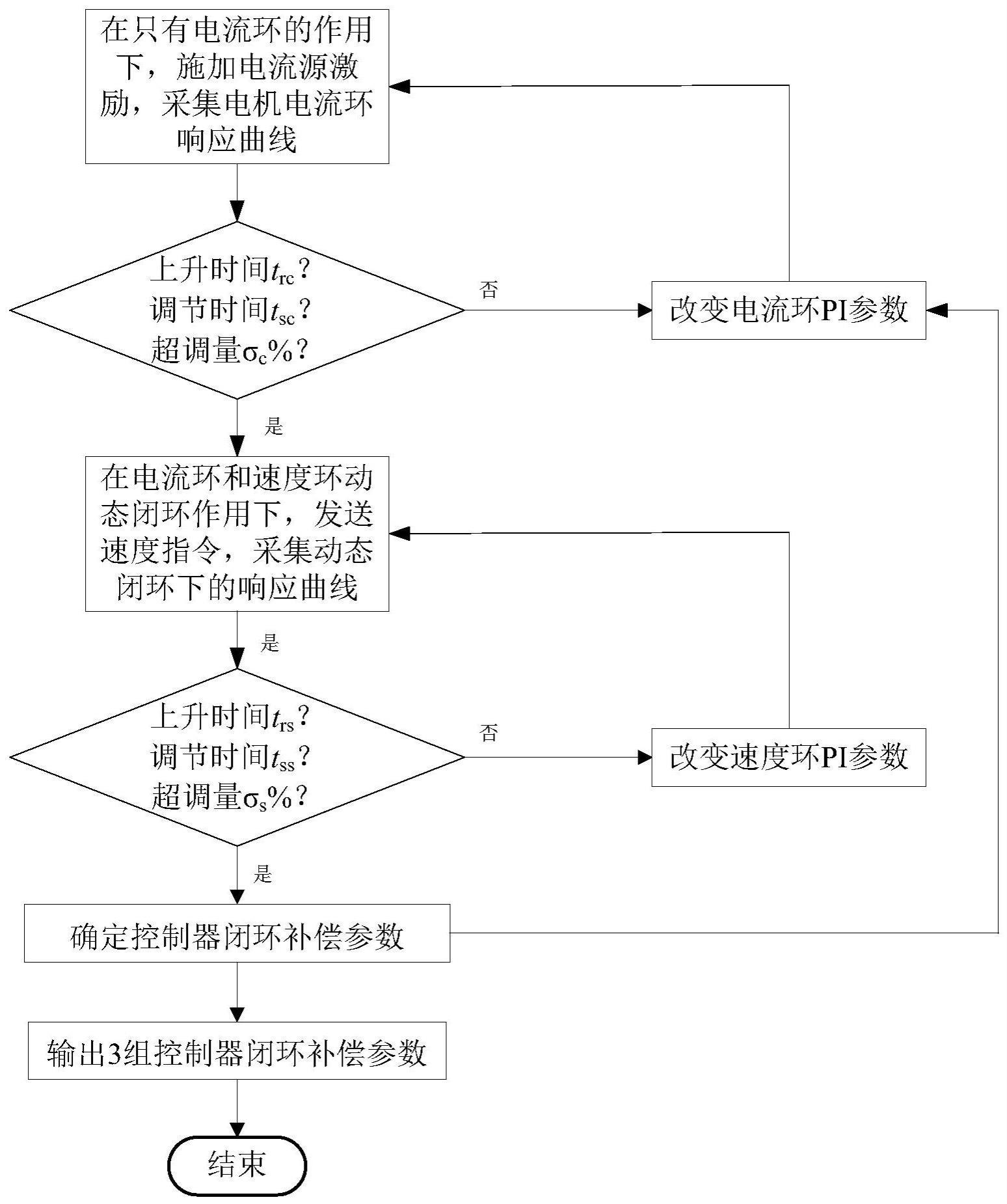
2、本发明目的通过以下技术方案予以实现:一种悬臂式cmg外框控制器动态闭环补偿参数设计方法,包括:步骤s100:外框电机在只有电流环作用下,给外框电机施加阶跃电流源激励,采集电机电流环的阶跃响应曲线;步骤s200:根据电机电流环的阶跃响应曲线得到电机电流环的阶跃响应曲线的第一上升时间trc、第一调节时间tsc和第一超调量σc%;步骤s300:如果第一上升时间trc、第一调节时间tsc和第一超调量σc%均满足预设要求,则进入步骤s400,否则改变电流环pi控制参数,返回到步骤s100;步骤s400:外框电机在电流环和速度环的闭环作用下,给外框电机发送速度环阶跃指令,采集速度环的阶跃响应曲线;步骤s500:根据速度环的阶跃响应曲线得到速度环的阶跃响应曲线的第二上升时间trs、第二调节时间tss和第二超调量σs%;步骤s600:如果第二上升时间trs、第二调节时间tss和第二超调量σs%均满足预设速度响应要求,则进入步骤s700;否则改变速度环pi控制参数,返回到步骤s400;步骤s700:确定一组控制器闭环补偿参数并记录步骤s600的速度环带宽,重新改变电流环pi控制参数,返回到步骤s100。
3、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,还包括:步骤s800:重复步骤s100至步骤s700,输出3组不同速度环带宽控制器闭环补偿参数。
4、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,在步骤s100中,通过串口通信采集电机电流环的阶跃响应曲线。
5、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,在步骤s400中,通过串口通信采集速度环的阶跃响应曲线。
6、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,所述方法是基于fpga电路的位置、转速、电流三闭环控制调速系统实现的。
7、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,位置环将根据外框电机的位置偏差计算需要的速度值,把速度值发送给速度环。
8、上述悬臂式cmg外框控制器动态闭环补偿参数设计方法中,速度环根据速度指令与位置闭环的速度值执行速度控制,把电流值发送给电流环,电流环的输出是驱动电机运动。
9、一种悬臂式cmg外框控制器动态闭环补偿参数设计系统,包括:第一模块,用于在只有电流环作用下,给外框电机施加阶跃电流源激励,采集电机电流环的阶跃响应曲线;第二模块,用于根据电机电流环的阶跃响应曲线得到电机电流环的阶跃响应曲线的第一上升时间trc、第一调节时间tsc和第一超调量σc%;第三模块,用于判断第一上升时间trc、第一调节时间tsc和第一超调量σc%均是否满足预设要求;第四模块,用于在电流环和速度环的闭环作用下,给外框电机发送速度环阶跃指令,采集速度环的阶跃响应曲线;第五模块,用于根据速度环的阶跃响应曲线得到速度环的阶跃响应曲线的第二上升时间trs、第二调节时间tss和第二超调量σs%;第六模块,用于判断第二上升时间trs、第二调节时间tss和第二超调量σs%均是否满足预设速度响应要求;第七模块,用于确定一组控制器闭环补偿参数并记录速度环带宽。
10、上述悬臂式cmg外框控制器动态闭环补偿参数设计系统中,还包括:第八模块,用于输出3组不同速度环带宽控制器闭环补偿参数。
11、一种电子设备,包括:存储器:用于存储计算机可读指令;以及处理器:用于运行所述计算机可读指令,执行悬臂式cmg外框控制器动态闭环补偿参数设计方法。
12、本发明与现有技术相比具有如下有益效果:
13、(1)本发明通过不同速度环带宽控制器闭环补偿参数的特征,达到控制力矩陀螺适应不同整星安装的局部固有频率不同的应用场景中,避免与整星结构发生耦合共振的效果;
14、(2)本发明通过可在线更改控制力矩陀螺的带宽特征,达到提升控制力矩陀螺产品的性能的效果。
技术特征:
1.一种悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于包括:
2.根据权利要求1所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于还包括:
3.根据权利要求1所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于:在步骤s100中,通过串口通信采集电机电流环的阶跃响应曲线。
4.根据权利要求1所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于:在步骤s400中,通过串口通信采集速度环的阶跃响应曲线。
5.根据权利要求1所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于:所述方法是基于fpga电路的位置、转速、电流三闭环控制调速系统实现的。
6.根据权利要求5所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于:位置环将根据外框电机的位置偏差计算需要的速度值,把速度值发送给速度环。
7.根据权利要求6所述的悬臂式cmg外框控制器动态闭环补偿参数设计方法,其特征在于:速度环根据速度指令与位置闭环的速度值执行速度控制,把电流值发送给电流环,电流环的输出是驱动电机运动。
8.一种悬臂式cmg外框控制器动态闭环补偿参数设计系统,其特征在于包括:
9.根据权利要求8所述的悬臂式cmg外框控制器动态闭环补偿参数设计系统,其特征在于还包括:第八模块,用于输出3组不同速度环带宽控制器闭环补偿参数。
10.一种电子设备,其特征在于,包括:
技术总结
本发明公开了一种悬臂式CMG外框控制器动态闭环补偿参数设计方法及系统,包括:采集电机电流环的阶跃响应曲线;判断第一上升时间t<subgt;rc</subgt;、第一调节时间t<subgt;sc</subgt;和第一超调量σ<subgt;c</subgt;%均是否满足预设要求,否则改变电流环PI控制参数;采集速度环的阶跃响应曲线;判断第二上升时间t<subgt;rs</subgt;、第二调节时间t<subgt;ss</subgt;和第二超调量σ<subgt;s</subgt;%均是否满足预设速度响应要求,否则改变电流环PI控制参数确定一组控制器闭环补偿参数并记录的速度环带宽。本发明具有可在线改变闭环补偿参数及避免与整星结构发生耦合共振现象的优点,使产品性能得到提升。
技术研发人员:杨杰,高雪松,朱彦波,周承豫,申友涛,徐成浩
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!