一种电力巡检机器人待机充电仓系统及使用方法与流程
本发明涉及一种电力巡检机器人待机充电仓系统及使用方法,属于电力设备。
背景技术:
1、电力巡检机器人一般设置在厂房或园区内,通过其内部的控制器,使电力巡检机器人沿着一定的轨道进行移动,对厂房或园区内的情况进行巡检,并可发送信号,使管理人员可以及时了解厂房或园区内的情况,通过电力巡检机器人的使用,可以在一定程度上降低安保人员的劳动强度。
2、电力巡检机器人内部设置有电源,在机器人内电源的电量消耗完之前,需要机器人进行充电。但是,机器人充电需要人工对其进行辅助才能进行充电的操作,使得机器人充电较为麻烦。
技术实现思路
1、本发明目的是提供一种电力巡检机器人待机充电仓系统及使用方法,通过plc控制器二控制伺服电机转动,配合齿轮和齿条板的啮合作用,带动滑座沿着滑轨的表面滑动,通过延伸板的设置,机器人完全伸入到充电仓内,当机器人右侧设置的无线充电接收器与充电座贴合到一起时,充电仓内的电源模块对机器人内的内置电源进行充电,且通过磁铁一和磁铁二相互吸引,保障无线充电接收器和充电座之间贴合更加稳定,达到可远程控制机器人进行充电的效果,有效地解决了背景技术中存在的上述问题。
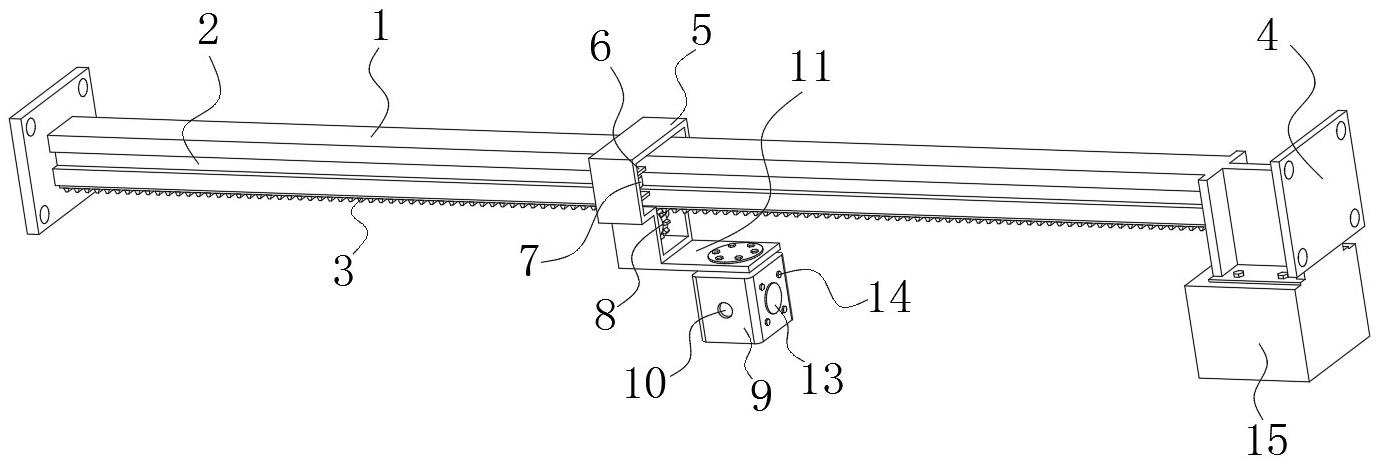
2、本发明的技术方案是:一种电力巡检机器人待机充电仓系统,包含滑轨,所述滑轨的前后侧均开设有导向槽,滑轨的底部固定安装有齿条板,滑轨的两端均焊接有安装座;
3、滑轨上滑动连接有滑座,滑座的横截面呈t形框状,滑座上半部的前后侧内壁均固定安装有上下分布的两个安装板,两个安装板之间转动连接有滚轮,滚轮抵接在导向槽的内壁上滚动,滑座的下半部前后侧壁之间转动连接有齿轮,齿轮啮合在齿条板的底部;
4、滑座的底部固定安装有延伸板,延伸板远离滑座一端的底部固定安装有机器人,机器人的前侧设置有摄像头二,机器人的右侧中心处设置有无线充电接收器,机器人的右侧以无线充电接收器为圆心阵列设置有若干个磁铁一;
5、滑轨右端的底部固定安装有充电仓,充电仓为防尘网制成,充电仓靠近机器人的一侧开设有避让口,充电仓右侧内壁的顶部设置有摄像头一,充电仓右侧内壁且位于摄像头一的两侧均设置有照明灯,充电仓前后侧壁之间且位于摄像头一的左侧固定安装有安装架,安装架左侧设置有充电座,充电座与无线充电接收器相适配,安装架的左侧阵列设置有磁铁二,磁铁二与磁铁一相适配,磁铁二与磁铁一相对一端极性相反,充电仓前侧内壁且位于避让口处固定安装有卡槽,卡槽内插接有海绵块。
6、所述齿轮的转轴一端固定安装有伺服电机。
7、所述海绵块朝向避让口的一侧设置有倾斜面,机器人的前侧抵接在该倾斜面上。
8、所述机器人内设置有内置电源,内置电源与无线充电接收器电连接,内置电源为摄像头二和齿轮所连接的伺服电机供电;机器人的内部设置有plc控制器二、处理器二和无线通信模块二,plc控制器二和处理器二之间电连接,处理器二和无线通信模块二信号连接,plc控制器二与齿轮所连接的伺服电机信号连接。
9、所述充电仓内设置有电源模块,电源模块电连接有市电电源,市电电源为380v,电源模块为摄像头一、照明灯和充电座供电。
10、所述充电仓内设置有plc控制器一、处理器一和无线通信模块一,无线通信模块一和处理器一之间信号连接,处理器一和plc控制器一之间信号连接, plc控制器一与摄像头一和照明灯之间均为信号连接。
11、所述无线通信模块一和无线通信模块二均信号连接有手机终端。
12、一种电力巡检机器人待机充电仓的使用方法,采用上述充电仓系统,包含如下步骤:
13、使用者通过plc控制器二控制伺服电机转动,从而带动齿轮转动,配合齿轮和齿条板的啮合作用,使得齿轮在齿条板的底部滚动,带动滑座沿着滑轨的表面滑动,两个安装板之间转动连接有滚轮,同时滚轮在导向槽内滚动,对滑座的滑动过程进行导向和限位;通过延伸板的设置,机器人完全伸入到充电仓内,当机器人右侧设置的无线充电接收器与充电座贴合到一起时,充电仓内的电源模块对机器人内的内置电源进行充电,且通过磁铁一和磁铁二相互吸引,保障无线充电接收器和充电座之间贴合更加稳定;
14、使用者通过手机终端设置的手机app向无线通信模块一发送信号,无线通信模块一将信号传递至处理器一,信号经处理器一处理后,传输至plc控制器一,再通过plc控制器一控制照明灯发光和摄像头一进行摄制和转向,并通过摄像头一对机器人的状态进行观察;
15、使用者通过手机终端设置的手机app向无线通信模块二发送信号,无线通信模块二将信号传递至处理器二,信号经处理器二处理后,传输至plc控制器二,再通过plc控制器二控制控制机器人内设置的摄像头二进行设置或转向。
16、本发明的有益效果是:通过plc控制器二控制伺服电机转动,配合齿轮和齿条板的啮合作用,带动滑座沿着滑轨的表面滑动,通过延伸板的设置,机器人完全伸入到充电仓内,当机器人右侧设置的无线充电接收器与充电座贴合到一起时,充电仓内的电源模块对机器人内的内置电源进行充电,且通过磁铁一和磁铁二相互吸引,保障无线充电接收器和充电座之间贴合更加稳定,达到可远程控制机器人进行充电的效果。
技术特征:
1.一种电力巡检机器人待机充电仓系统,其特征在于:包含滑轨(1),所述滑轨(1)的前后侧均开设有导向槽(2),滑轨(1)的底部固定安装有齿条板(3),滑轨(1)的两端均焊接有安装座(4);
2.根据权利要求1所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述齿轮(8)的转轴一端固定安装有伺服电机(32)。
3.根据权利要求1所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述海绵块(22)朝向避让口(12)的一侧设置有倾斜面,机器人(9)的前侧抵接在该倾斜面上。
4.根据权利要求2所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述机器人(9)内设置有内置电源(31),内置电源(31)与无线充电接收器(13)电连接,内置电源(31)为摄像头二(10)和齿轮(8)所连接的伺服电机(32)供电;机器人(9)的内部设置有plc控制器二(26)、处理器二(27)和无线通信模块二(28),plc控制器二(26)和处理器二(27)之间电连接,处理器二(27)和无线通信模块二(28)信号连接,plc控制器二(26)与齿轮(8)所连接的伺服电机(32)信号连接。
5.根据权利要求1所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述充电仓(15)内设置有电源模块(29),电源模块(29)电连接有市电电源(30),市电电源(30)为380v,电源模块(29)为摄像头一(16)、照明灯(17)和充电座(18)供电。
6.根据权利要求1所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述充电仓(15)内设置有plc控制器一(23)、处理器一(24)和无线通信模块一(25),无线通信模块一(25)和处理器一(24)之间信号连接,处理器一(24)和plc控制器一(23)之间信号连接, plc控制器一(23)与摄像头一(16)和照明灯(17)之间均为信号连接。
7.根据权利要求1所述的一种电力巡检机器人待机充电仓系统,其特征在于:所述无线通信模块一(25)和无线通信模块二(28)均信号连接有手机终端(33)。
8.一种电力巡检机器人待机充电仓的使用方法,采用权利要求1-7任意一项所述的充电仓系统,其特征在于包含如下步骤:
技术总结
本发明涉及一种电力巡检机器人待机充电仓系统及使用方法,属于电力设备技术领域。技术方案是:滑轨(1)的底部固定安装有齿条板(3),滑轨(1)上滑动连接有滑座(5),滑座(5)的下半部转动连接有齿轮(8),齿轮(8)啮合在齿条板(3)的底部,滑座(5)的底部固定安装有延伸板(11),延伸板(11)远离滑座(5)一端的底部固定安装有机器人(9),滑轨(1)右端的底部固定安装有充电仓(15)。本发明的有益效果:通过PLC控制器二控制滑座沿着滑轨的表面滑动,通过延伸板的设置,机器人完全伸入到充电仓内进行充电,通过磁铁的吸引保障无线充电接收器和充电座之间贴合更加稳定,达到可远程控制机器人进行充电的效果。
技术研发人员:赵燕,王赛,陈学伟,王伟,张剑飞,李少岩,王涛
受保护的技术使用者:国网冀北电力有限公司唐山供电公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!