一种基于高频注入与磁链观测器的电机泵全速域控制方法
本发明属于电机泵及其控制领域,尤其涉及二维柱塞电机泵相关控制,具体是一种基于高频注入与磁链观测器的电机泵全速域控制方法。
背景技术:
1、在制造业中,用更小的能耗获得更多的效益,达到效益最大化是制造者追求的主要目标之一。因此,如今液压系统向着智能、节能及集成一体等方向发展,以此达到提效低耗的目的。针对上述问题,液压电机泵是一种很好的解决方案。二维柱塞式液压电机泵将二维柱塞式液压泵与永磁同步电机相结合,具有结构紧凑、高功率密度比和高效率等优势,达到高效、节能、环保以及高度信息化、智能化的目的,符合智能液压系统的发展趋势。
2、对整体电机液压泵的控制策略而言,相较于传统的有位置传感器,无位置传感器无需在电液泵结构中预留出传感器安装位置,针对结构紧凑的电液泵系统,无感控制更加贴近实际需求,采用合理的控制策略对整体控制过程进行优化显得尤为重要。
技术实现思路
1、为了弥补现有技术的不足,本发明提供一种基于高频注入与磁链观测器的电机泵全速域控制方法的技术方案。
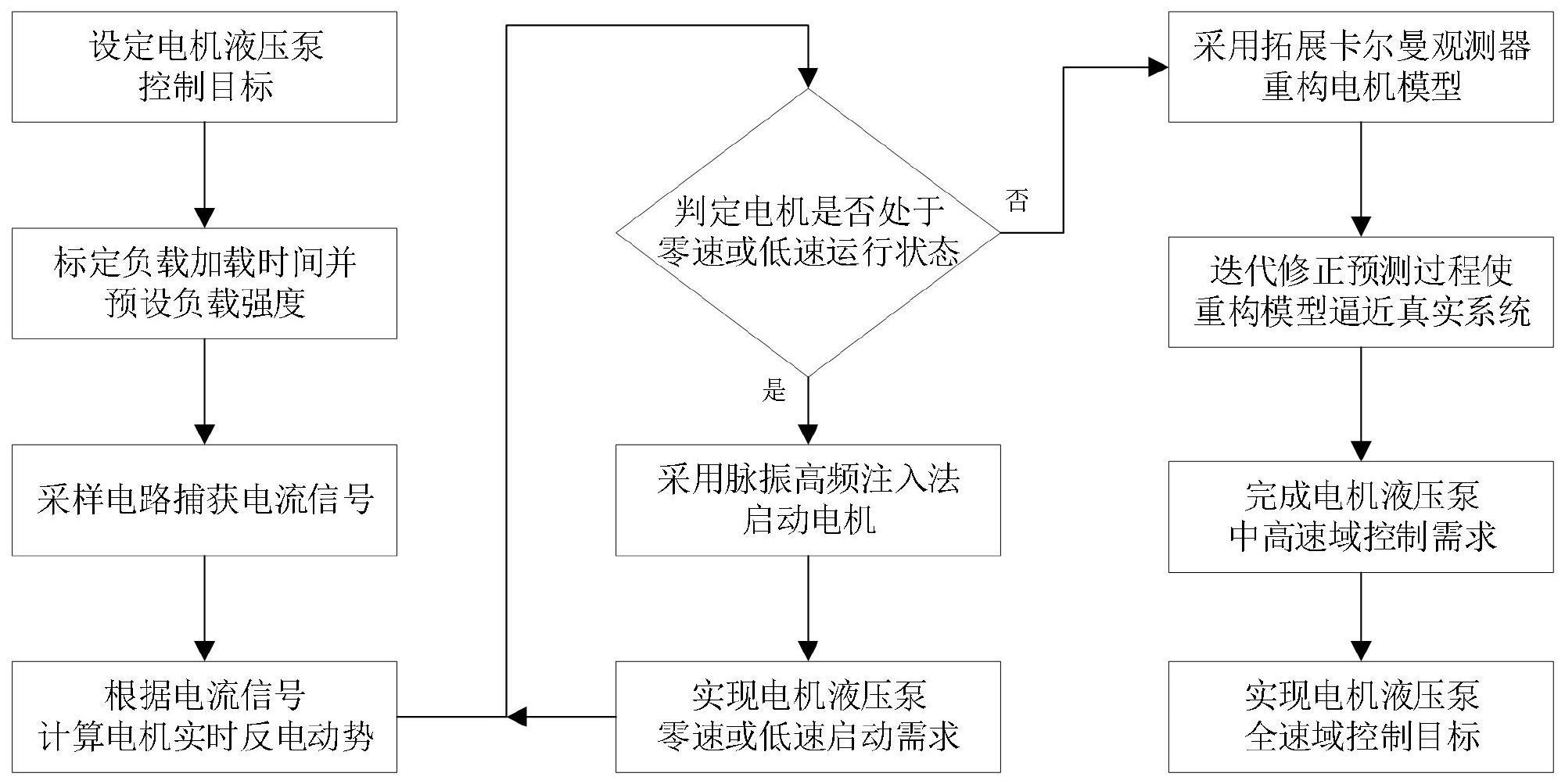
2、所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,包括以下步骤:
3、s1设定电机液压泵控制目标;
4、s2标定负载加载时间并预设负载强度;
5、s3通过采样电路捕获电流信号,并根据电流信号计算电机实时反电动势;
6、s4判断电机是否处于零速或低速运行状态,根据电机的运行状态,选择进入步骤s5或步骤s6;
7、s5采用脉振高频注入法启动电机,实现电机液压泵零速或低速启动需求,并返回步骤s4再次判断电机运行状态;
8、s6重构电机模型,并迭代修正预测过程,使重构模型逼近真实系统;
9、s61完成电机液压泵中高速域控制需求;
10、s7实现电机液压泵全速控制。
11、进一步的,所述步骤s6通过采用拓展卡尔曼观测器进行重构电机模型。
12、进一步的,当电机处于零速或低速运行状态,则进入步骤s5;
13、当电机处于其他运行状态,则进入步骤s6。
14、进一步的,步骤s5中,采用脉振高频注入法启动电机时,同步旋转坐标系中电机泵的数学模型为:
15、
16、进一步的,在d轴接入高频激励信号时,同步旋转坐标系中电机泵的数学模型可简化,简化后为:
17、
18、将数学模型转化为矩阵形式,简化后的数学模型的矩阵形式为:
19、
20、此时激励电压和相应电流的矩阵形式为:
21、
22、进一步的,根据注入高频信号后的相应电流,解算对应的位置,以获取电机泵运行过程中的角度信息,解算模型为:
23、
24、将获取的角度信息中的高频信号分离,根据转子位置误差调节减小角度误差,实现精准位置跟随。
25、进一步的,采用拓展卡尔曼滤波观测器重构电机泵模型,此时电机泵数学模型转换的状态空间表达式为:
26、
27、其中:
28、
29、
30、进一步的,迭代修正预测过程的算法包括以下步骤:
31、(1)建立状态观测器预测方程:
32、
33、(2)计算预测协方差,计算方程为:
34、kk|k-1=pk|k-1·ht(h·pk|k-1·ht+r)-1;
35、(3)计算卡尔曼增量,计算方程为:
36、
37、(4)对估计值进行修正,修正模型为:
38、pk|k=(i-kk|k-1·h)pk|k-1;
39、(5)计算下一时刻估计协方差,
40、进一步的,修正后的系统状态方程和量测方程为:
41、
42、与现有技术相比,本发明有以下优点:
43、本发明基于二维柱塞式液压电机泵的设计思想,针对电液泵在运行过程中依靠无位置传感器式的控制方式实现全速域优化控制展开研究,提出一种基于电液泵的全速域无位置传感器式控制策略,实现电液泵全速域优化控制效果。
44、本发明将脉振高频注入与拓展卡尔曼滤波算法结合,使电液泵控制系统有较强的鲁棒性和较好的跟随性,提高整体系统的动态性能,具有开阔的应用前景。
技术特征:
1.一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于包括以下步骤:
2.根据权利要求1所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于所述步骤s6通过采用拓展卡尔曼观测器进行重构电机模型。
3.根据权利要求1所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于当电机处于零速或低速运行状态,则进入步骤s5;
4.根据权利要求1所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于步骤s5中,采用脉振高频注入法启动电机时,同步旋转坐标系中电机泵的数学模型为:
5.根据权利要求4所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于在d轴接入高频激励信号时,同步旋转坐标系中电机泵的数学模型可简化,简化后为:
6.根据权利要求5所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于根据注入高频信号后的相应电流,解算对应的位置,以获取电机泵运行过程中的角度信息,解算模型为:
7.根据权利要求2所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于采用拓展卡尔曼滤波观测器重构电机泵模型,此时电机泵数学模型转换的状态空间表达式为:
8.根据权利要求7所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于迭代修正预测过程的算法包括以下步骤:
9.估计权利要求8所述的一种基于高频注入与磁链观测器的电机泵全速域控制方法,其特征在于修正后的系统状态方程和量测方程为:
技术总结
本发明公开一种基于高频注入与磁链观测器的电机泵全速域控制方法,首先设定电机液压泵控制目标,标定负载加载时间并预设负载强度;通过采样电路捕获电流信号,并计算电机实时反电动势;判断电机是否处于零速或低速运行状态,根据电机的运行状态,选择进入不同的步骤;采用脉振高频注入法启动电机,实现电机液压泵零速或低速启动需求,或者采用拓展卡尔曼观测器进行重构电机模型,并迭代修正预测过程,使重构模型逼近真实系统;完成电机液压泵中高速域控制需求,实现电机液压泵全速控制。本发明将脉振高频注入与拓展卡尔曼滤波算法结合,使电液泵控制系统有较强的鲁棒性和较好的跟随性,提高整体系统的动态性能,具有开阔的应用前景。
技术研发人员:裘信国,沈彤,黎昌龙,王志立,郑颖,季行健,王晨
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!