一种六相电驱重构型车载充电系统双矢量MPC方法
本发明涉及电力电子与电力传动,尤其涉及种六相电驱重构型车载充电系统双矢量mpc方法。
背景技术:
1、随着交通环境问题日益突显,电动汽车近年来在道路交通运输中得到了广泛的关注,但由于目前电池能量密度有限,大功率快速电动汽车充电桩部署密度较低,续航里程不理想和充电不便仍然是电动汽车推广的主要障碍。在论文:fengyu,zhihao zhu,xing liuand zhen zhang.electric-drive-reconstructed onboard charger for solar-poweredelectric vehicles incorporating six-phase machine[j].ieee transactions onpower electronics,2022,37(6):6544-6555.记载到:光伏能源适用性的不断扩展使得光伏发电技术应用到电动汽车领域成为现实,但光伏充电模式的并入不仅需要额外的功率器件进而匹配动力电池电压等级,而且也会增加控制算法的复杂性。因此,对车载充电系统控制算法的研究不可或缺。
2、在多相电驱重构型车载充电系统中,传统充电控制方法虽然能够有效地适应光伏充电模式,但mpc由于其响应快、易于纳入非线性、设计灵活等优点,通常被认为是一种更具竞争力的方法。mpc主要通过价值函数,进而同时控制多个子空间的电流,但不可避免的地以增加计算时间和额外参数为代价来抑制谐波。此外,为了提高成本函数的评价性能,还需要考虑权重因子调整的设计。在授权公共号:cn106357188b,专利名称:一种统一的永磁电机单/双矢量mpc方法及装置里记载,单矢量mpc在一个采样周期中仅作用一个最优电压矢量,算法简单、响应速度快,但由于仅能在固有基本电压矢量中选择控制量,电流跟踪精度较差,不能保证最优电压矢量在加入占空比后仍为最优。
3、因此,为解决单矢量mpc方法存在多参数整定困难、耗费大量的计算时间、需要控制多个子空间等问题,引入了双矢量mpc策略,双矢量mpc策略在每个控制周期同时选择2个电压矢量进行作用,从而可以提高电流和转矩控制精度,减小纹波。常用的双矢量mpc策略在多相电驱重构型车载充电系统中应用时有助于改善永磁同步电机的动稳态控制性能,但也存在计算量大等问题。
技术实现思路
1、本发明的目的在于提供一种六相电驱重构型车载充电系统双矢量mpc方法;该方法能够在提高电流和转矩控制精度的同时,减少pi参数优化整定的工作,降低电流、转矩纹波,减轻系统计算负担,提高电压利用率。
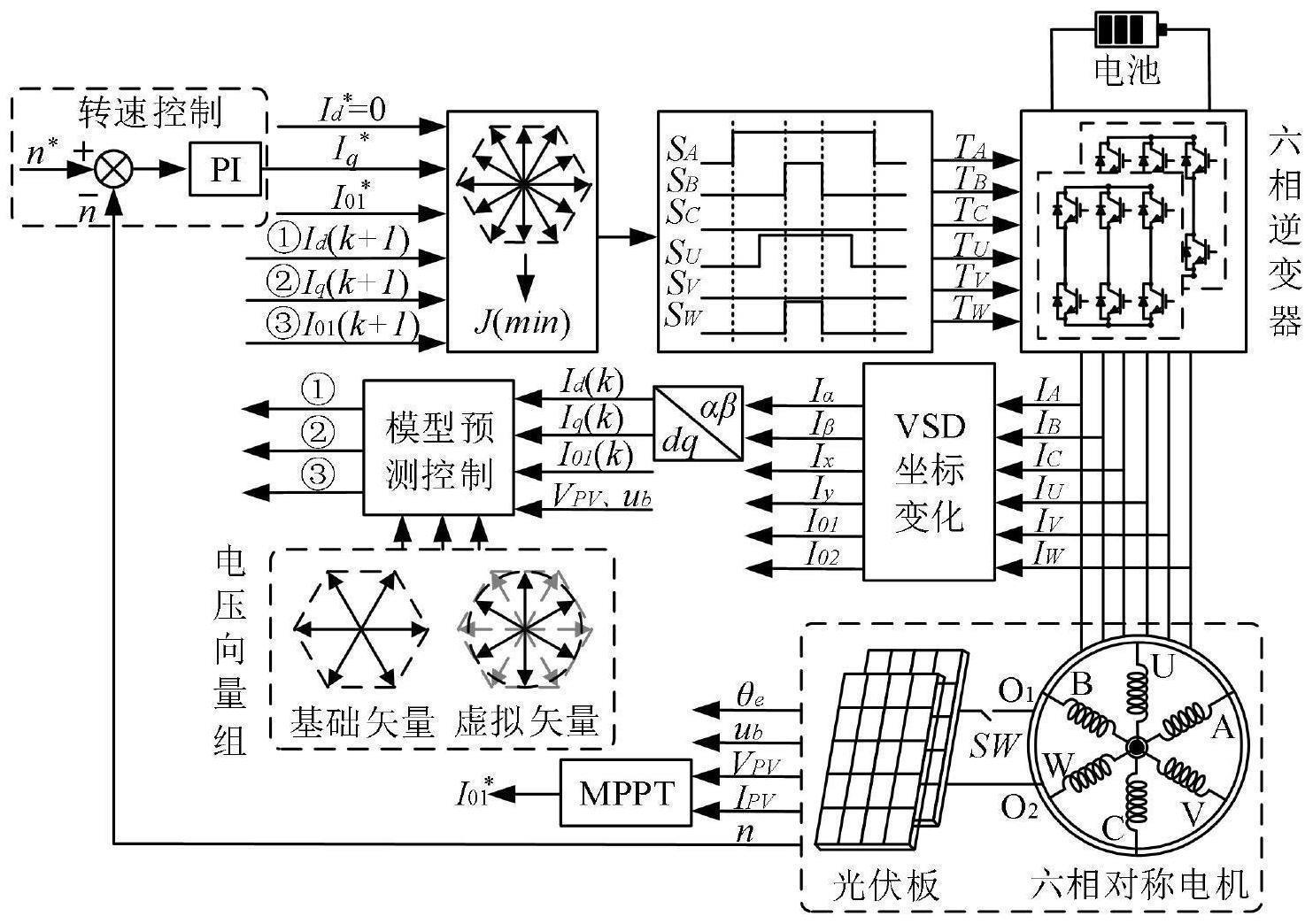
2、为了实现上述发明目的,本发明采用技术方案具体为:光伏板正极连接到六相对称永磁同步电机绕组相abc中性点o1点,光伏板负极连接到六相对称永磁同步电机绕组相uvw中性点o2点,光伏板正极与电机中性点o1点中间接入模式开关sw,六相对称永磁同步电机的绕组端口连接到六相逆变器,利用双矢量模型预测控制器对六相逆变器进行控制。
3、一种六相电驱重构型车载充电系统双矢量mpc方法,包括如下步骤:
4、s1:采集光伏板的输出电压vp与输出电流ip,通过mppt控制器计算得到01轴电流给定值i01*,控制01轴电流稳定给电池充电;根据电机转速设定值n*与采集的实际电机转速n,经转速控制器得出的q轴电流给定值iq*,控制q轴电流使得转速稳定;
5、s2:将采集六相对称电机的实际相电流ia、ib、ic、iu、iv、iw通过矢量空间解耦坐标变化得到k时刻的d轴、q轴、以及01轴电流值id(k)、iq(k)、i01(k),为计算预测电流提供前置条件;
6、s3:将基础电压大矢量与虚拟矢量作为双矢量模型预测控制器的电压矢量组,并将当前时刻的电流值id(k)、iq(k)、i01(k)输入到双矢量模型预测控制器中,通过离散化公式计算每个电压矢量对应的预测电流id(k+1)、iq(k+1)、i01(k+1),作为下一时刻电流值的标定;
7、s4:将不同的预测电流与给定参考值iq*、i01*输入到价值函数中,选择下一周期所用的基础电压矢量或虚拟电压矢量,进而得到下一个周期内的开关管通断状态,将其作为六相逆变器驱动信号,最终实现六相电驱重构型车载充电系统的充电模式、驱动模式与边跑边充模式一体化。
8、作为本发明的优选方案,所述步骤s3中,双矢量模型预测控制器中的电压矢量组由零矢量v0、基础电压大矢量vli与虚拟矢量vsi组成,由于六相对称永磁同步电机空间相邻的基础电压大矢量vli在x-y子空间的投影等大反向,因此虚拟矢量vsi由空间相邻的两个相同作用时长的基础电压大矢量vli合成所得。
9、作为本发明的优选方案,所述步骤s4中,双矢量模型中所选电压矢量不包含x-y子空间的谐波分量,并且需要对01轴电流进行控制,因此价值函数修改为表示为:
10、
11、式中,iq*、i01*为d轴、q轴、以及01轴电流给定值,其中id*始终保持为0;id(k+1)、iq(k+1)、i01(k+1)为每个电压矢量对应的预测电流;m为价值权重系数,且取值范围在0-1之间。
12、与现有技术相比,本发明的有益效果为:
13、(1)相比于传统的svpwm控制方案应用在六相电驱重构型车载充电系统中多个子空间进行控制过程较为复杂,并且需要对多个pi控制器进行参数整定等问题;本发明所采用的双矢量mpc方案,仅在转速控制器使用一个pi调节器,并且可以利用价值函数对多个子空间进行控制,简化控制过程的同时,缩短参数整定时间。
14、(2)相比于传统单矢量mpc器存在计算负担重、电压利用率低等问题;本发明所用的双矢量mpc采用的电压矢量组由基础电压大矢量和虚拟矢量组成,在x-y子空间的谐波分量等效为0,并且只需要在13个电压矢量中进行选择,极大程度上降低了算法的复杂度,并且有效减小计算负担,进而提高系统的稳态性能。
15、(3)本发明提出的六相电驱重构型车载充电系统双矢量mpc方法,在系统运行于边跑边充工作状态时,在一个控制周期内作用等时长的两个电压矢量,克服了传统模型预测控制方法在虚拟矢量合成时需要计算矢量作用时间的缺陷,简化了控制难度,提高了模型预测控制方法的通用性和实用性,是对现有技术的重要改进。
技术特征:
1.一种六相电驱重构型车载充电系统双矢量mpc方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种六相电驱重构型车载充电系统双矢量mpc方法,其特征在于,所述步骤s3中,双矢量模型预测控制器中的电压矢量组由零矢量v0、基础电压大矢量vli与虚拟矢量vsi组成;所述虚拟矢量vsi由空间相邻的两个相同作用时长的基础电压大矢量vli合成所得。
3.根据权利要求1所述的一种六相电驱重构型车载充电系统双矢量mpc方法,其特征在于,所述步骤s4中,双矢量模型中所选电压矢量不包含x-y子空间的谐波分量,并且需要对01轴电流进行控制,因此价值函数修改为表示为:
技术总结
本发明提供了一种六相电驱重构型车载充电系统双矢量MPC方法,属于电力电子与电力传动技术领域。解决了计算负担重、电压利用率低的问题。其技术方案为:包括以下步骤:S1:根据采集值并通过MPPT控制器与转速控制器得到电流给定值;S2:通过解耦得到k时刻的各轴电流值;S3:建立双矢量模型预测控制器的电压矢量组,并计算预测电流;S4:选择下一周期所用的电压矢量,实现六相电驱重构型车载充电系统边跑边充控制。本发明的有益效果为:本发明能够在提高电流和转矩控制精度的同时,降低电流、转矩纹波,减轻系统计算负担,提高电压利用率,具有广泛的应用前景。
技术研发人员:於锋,殷琪皓,王尧,成天昊
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!