一种高架空裸导线电工机器人的制作方法
本发明涉及导线监测,具体为一种高架空裸导线电工机器人。
背景技术:
1、架空线路是采用杆塔支持导线,适用于户外的一种线路安装形式,线路通常都采用多股绞合的裸导线来架设,因为导线的散热条件好,所以导线的载流量要比同截面的绝缘导线高出30~40%,从而降低了线路成本,由于裸导线表面没有绝缘外皮,在有利于散热同时方便了大功率的电流传输,一般用于野外的高压线架设,为了增加抗拉力,在一些铝绞线中心是钢绞线,称为“钢芯铝线”,但其缺点同样是有的,就是安全性不足,在人烟稠密区使用裸导线容易多次引发事故,这就导致在日常维护使用期间需要电工进行定期巡检,避免裸导线产生高温问题。
2、针对高架空裸导线在夏季的使用情况,排查高温过热是电工的一项重要工作,由于高空的危险性,现在大多采用无人机进行高温排查,为了避免无人机过度靠近导线导致无人机或者导线任意一个碰撞受损的问题,无人机处于远离导线的区域进行大范围的监测,这就导致检测的温度数值不够精准的问题,同时,正常的电工需要对电器设备经常性的检查及卫生清理,由于高空作业的特殊性,在电工自己进行温度巡检时也难以完成定期对裸导线的清理工作,相同的,无人机只能进行远距离的温度检测,也不具备对高架空的裸导线进行清理,鉴于此,我们提出一种高架空裸导线电工机器人。
技术实现思路
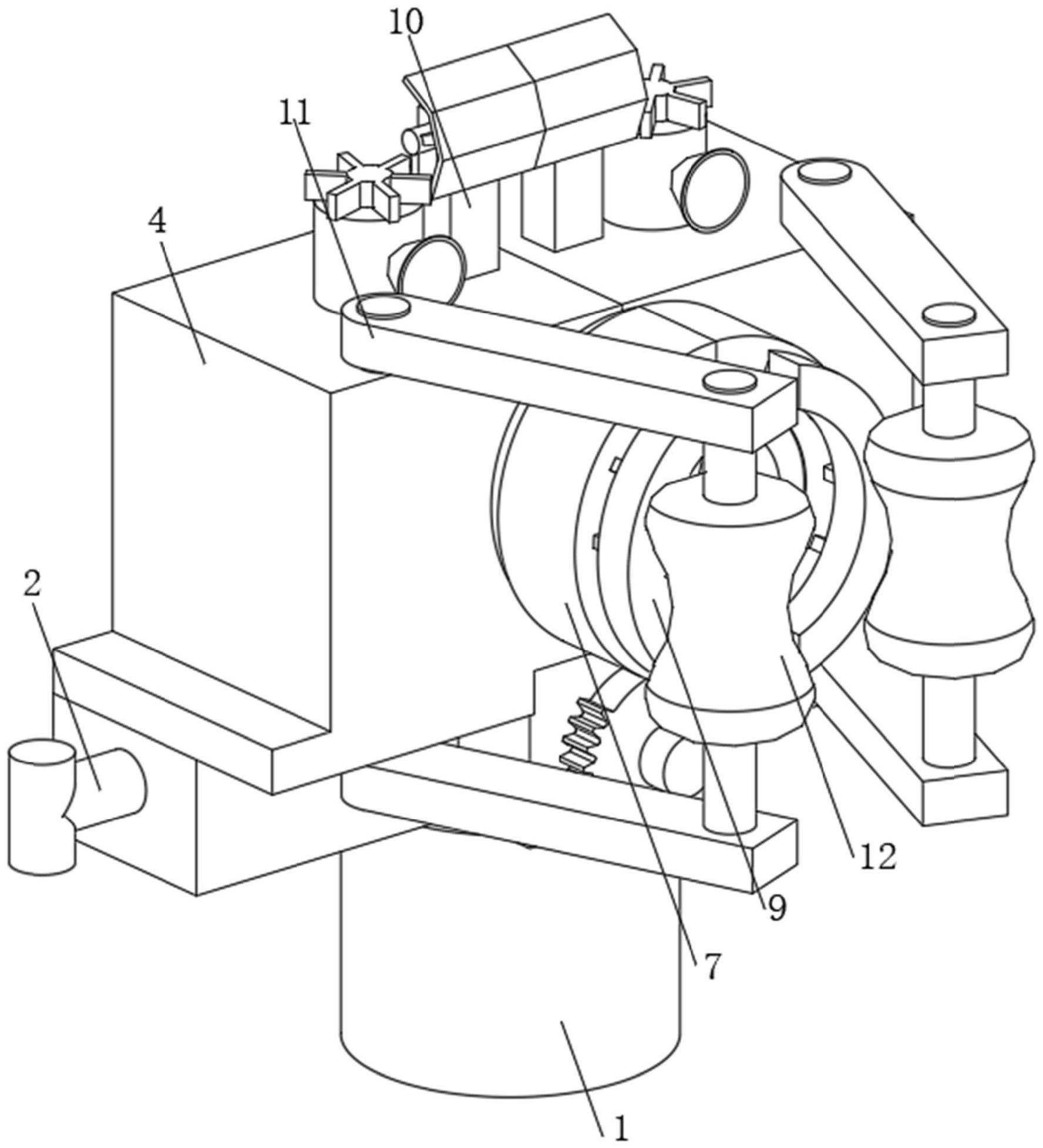
1、针对现有技术的不足,本发明提供了一种高架空裸导线电工机器人,解决了上述背景技术中提出的问题。为实现以上目的,本发明通过以下技术方案予以实现:一种高架空裸导线电工机器人,包括机座,所述机座的内部转动连接有双向螺纹杆,所述双向螺纹杆的表面螺纹连接有限位滑座,所述限位滑座的表面固定连接有半卡座,所述半卡座的内部转动连接有啮合齿轮,所述啮合齿轮的端部固定连接有导线滑轮,所述机座的内部设置有行进清理装置,所述行进清理装置上通过连接块固定连接有电工监测环座,所述半卡座上设置有巡检驱鸟装置。
2、优选的,所述限位滑座的表面滑动连接机座的内壁,所述电工监测环座的内部设置有摄像头和红外线感应器,所述半卡座的表面通过扭簧弹性连接有臂杆,所述臂杆的内部通过轴连接有辅助滑轮。
3、优选的,所述行进清理装置包括有电机、行进齿轮和转动清理装置,所述电机的表面通过螺栓固定连接机座的内部,所述电机的输出轴卡接有连杆,所述连杆的顶端贯穿机座固定连接有驱动齿轮,所述连杆的表面固定连接有锥齿轮一。
4、优选的,所述连杆的表面转动连接机座的内部,所述行进齿轮的一端固定连接导线滑轮的端部,所述行进齿轮的另一端转动连接半卡座的内部。
5、优选的,所述转动清理装置包括有半圆固定圈座和半齿轮,所述半圆固定圈座的端部固定连接半卡座的表面,所述半圆固定圈座的表面活动连接半圆套座,所述半圆固定圈座靠近半圆套座的一端固定连接有限位板,所述限位板的表面通过弹簧弹性连接半圆套座的内部,所述半圆套座的内壁固定连接有刷座。
6、优选的,所述半圆套座的内壁滑动连接限位板的表面,所述半圆套座的内部开始有通风孔,所述半圆套座的表面固定连接有齿牙,所述半圆套座远离半圆固定圈座的一端与连接块的端部固定连接。
7、优选的,所述半齿轮的内部固定连接有连轴,所述连轴的端部固定连接有锥齿轮二,所述连轴的表面转动连接机座的内部,所述锥齿轮二的表面啮合锥齿轮一的表面。
8、优选的,所述巡检驱鸟装置包括有连柱、安装块和出音桶,所述连柱的一端贯穿半卡座的内部固定连接啮合齿轮的端部,所述连柱的另一端固定连接有转片,所述安装块的内部通过扭簧弹性连接有转动轴板,所述转动轴板的表面固定连接有反光面板。
9、优选的,所述连柱的表面通过扭簧弹性连接有撞击套柱,所述出音桶的内壁固定连接有金属板,所述出音桶的表面固定连接有扩音喇叭。
10、优选的,所述安装块的表面固定连接半卡座的表面,所述出音桶的端部固定连接半卡座的表面。
11、有以上技术方案可见,本说明书实施例提供的一种高架空裸导线电工机器人,至少具备以下有益效果:
12、(1)、本发明通过转动双向螺纹杆带动两个限位滑座上半卡座进行相对运作,达到便于安装与拆卸的效果,将机座整体通过合并自锁后的两个半卡座固定在裸导线上,利用电力元器件控制任意一导线滑轮转动,该导线滑轮通过两个啮合齿轮的啮合带动另一滑轮转动,进一步达到转动时在裸导线表面进行前后行驶的目的,行驶期间启动电工监测环座对裸导线表面进行温度检测,从而达到实现自动化对高架空裸导线进行电工巡检的目的,代替人工巡检,同时近距离的温度检测更具备精准性,解决人工巡检高危险问题的同时解决无人机只能进行远距离的单一温度监测问题,机座整体通过两个导线滑轮在导线表面滑动巡检,在巡检期间接触导线表面达到一定的清理作用。
13、(2)、本发明通过行进清理装置内部各结构的运作,达到自动驱动机座巡检的目的,行驶期间启动电工监测环座内摄像头和红外线感应器,摄像头结合内部图像识别模块对裸导线表面损坏、开裂等问题进行智能识别,红外线感应器实时对导线表面进行温度检测,从而达到实现自动化对高架空裸导线进行电工巡检的目的,同时连杆通过锥齿轮一带动锥齿轮二上的连轴驱动半齿轮带动半圆套座转动,半圆套座带动刷座对裸导线表面进行转动清理,在模拟电工工作的机器人巡检期间进行清理,解决高架空裸导线上杂质残留的问题,完善自动化电工机器人的工作内容。
14、(3)、本发明通过啮合齿轮驱动连柱上转片与撞击套柱转动,转片通过转动轴板带动反光面板转动折射,达到利用光照驱散群鸟的效果,撞击套柱转动时通过撞击金属板并产生声音,扩音喇叭对其进行扩音,从而达到利用撞击声音警示鸟群的效果,具有驱鸟的功能,利用光照与声音进行双重驱鸟,避免电工机器人巡检期间鸟类在裸导线上停留的问题,保障鸟类安全同时提高巡检期间的安全性。
技术特征:
1.一种高架空裸导线电工机器人,包括机座(1),其特征在于:所述机座(1)的内部转动连接有双向螺纹杆(2),所述双向螺纹杆(2)的表面螺纹连接有限位滑座(3),所述限位滑座(3)的表面固定连接有半卡座(4),所述半卡座(4)的内部转动连接有啮合齿轮(5),所述啮合齿轮(5)的端部固定连接有导线滑轮(6),所述机座(1)的内部设置有行进清理装置(7),所述行进清理装置(7)上通过连接块(8)固定连接有电工监测环座(9),所述半卡座(4)上设置有巡检驱鸟装置(10)。
2.根据权利要求1所述的一种高架空裸导线电工机器人,其特征在于:所述限位滑座(3)的表面滑动连接机座(1)的内壁,所述电工监测环座(9)的内部设置有摄像头和红外线感应器,所述半卡座(4)的表面通过扭簧弹性连接有臂杆(11),所述臂杆(11)的内部通过轴连接有辅助滑轮(12)。
3.根据权利要求1所述的一种高架空裸导线电工机器人,其特征在于:所述行进清理装置(7)包括有电机(71)、行进齿轮(75)和转动清理装置(76),所述电机(71)的表面通过螺栓固定连接机座(1)的内部,所述电机(71)的输出轴卡接有连杆(72),所述连杆(72)的顶端贯穿机座(1)固定连接有驱动齿轮(73),所述连杆(72)的表面固定连接有锥齿轮一(74)。
4.根据权利要求3所述的一种高架空裸导线电工机器人,其特征在于:所述连杆(72)的表面转动连接机座(1)的内部,所述行进齿轮(75)的一端固定连接导线滑轮(6)的端部,所述行进齿轮(75)的另一端转动连接半卡座(4)的内部。
5.根据权利要求3所述的一种高架空裸导线电工机器人,其特征在于:所述转动清理装置(76)包括有半圆固定圈座(761)和半齿轮(765),所述半圆固定圈座(761)的端部固定连接半卡座(4)的表面,所述半圆固定圈座(761)的表面活动连接半圆套座(762),所述半圆固定圈座(761)靠近半圆套座(762)的一端固定连接有限位板(763),所述限位板(763)的表面通过弹簧弹性连接半圆套座(762)的内部,所述半圆套座(762)的内壁固定连接有刷座(764)。
6.根据权利要求5所述的一种高架空裸导线电工机器人,其特征在于:所述半圆套座(762)的内壁滑动连接限位板(763)的表面,所述半圆套座(762)的内部开始有通风孔,所述半圆套座(762)的表面固定连接有齿牙,所述半圆套座(762)远离半圆固定圈座(761)的一端与连接块(8)的端部固定连接。
7.根据权利要求5所述的一种高架空裸导线电工机器人,其特征在于:所述半齿轮(765)的内部固定连接有连轴(766),所述连轴(766)的端部固定连接有锥齿轮二(767),所述连轴(766)的表面转动连接机座(1)的内部,所述锥齿轮二(767)的表面啮合锥齿轮一(74)的表面。
8.根据权利要求1所述的一种高架空裸导线电工机器人,其特征在于:所述巡检驱鸟装置(10)包括有连柱(101)、安装块(103)和出音桶(106),所述连柱(101)的一端贯穿半卡座(4)的内部固定连接啮合齿轮(5)的端部,所述连柱(101)的另一端固定连接有转片(102),所述安装块(103)的内部通过扭簧弹性连接有转动轴板(104),所述转动轴板(104)的表面固定连接有反光面板(105)。
9.根据权利要求8所述的一种高架空裸导线电工机器人,其特征在于:所述连柱(101)的表面通过扭簧弹性连接有撞击套柱(107),所述出音桶(106)的内壁固定连接有金属板(108),所述出音桶(106)的表面固定连接有扩音喇叭(109)。
10.根据权利要求8所述的一种高架空裸导线电工机器人,其特征在于:所述安装块(103)的表面固定连接半卡座(4)的表面,所述出音桶(106)的端部固定连接半卡座(4)的表面。
技术总结
本发明涉及导线监测技术领域,具体为一种高架空裸导线电工机器人,包括机座,所述机座的内部转动连接有双向螺纹杆,所述双向螺纹杆的表面螺纹连接有限位滑座,所述限位滑座的表面固定有半卡座,所述半卡座的内部转动连接有啮合齿轮,所述啮合齿轮的端部固定连接有导线滑轮,所述机座的内部设置有行进清理装置,所述行进清理装置上通过连接块固定连接有电工监测环座,所述半卡座上设置有巡检驱鸟装置。本发明将机座整体通过半卡座固定在裸导线上,控制机座在裸导线上行驶期间利用电工监测环座内设备对裸导线表面进行温度检测与图像识别,达到实现自动化对高架空裸导线进行电工巡检的目的,代替人工巡检,精准性、安全性高。
技术研发人员:由嘉,周宇,韦永宏
受保护的技术使用者:安捷电维智能科技研究院(广州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!