一种双馈飞轮转动惯量获取方法和装置与流程
本发明涉及储能,尤其是一种双馈飞轮转动惯量获取方法和装置。
背景技术:
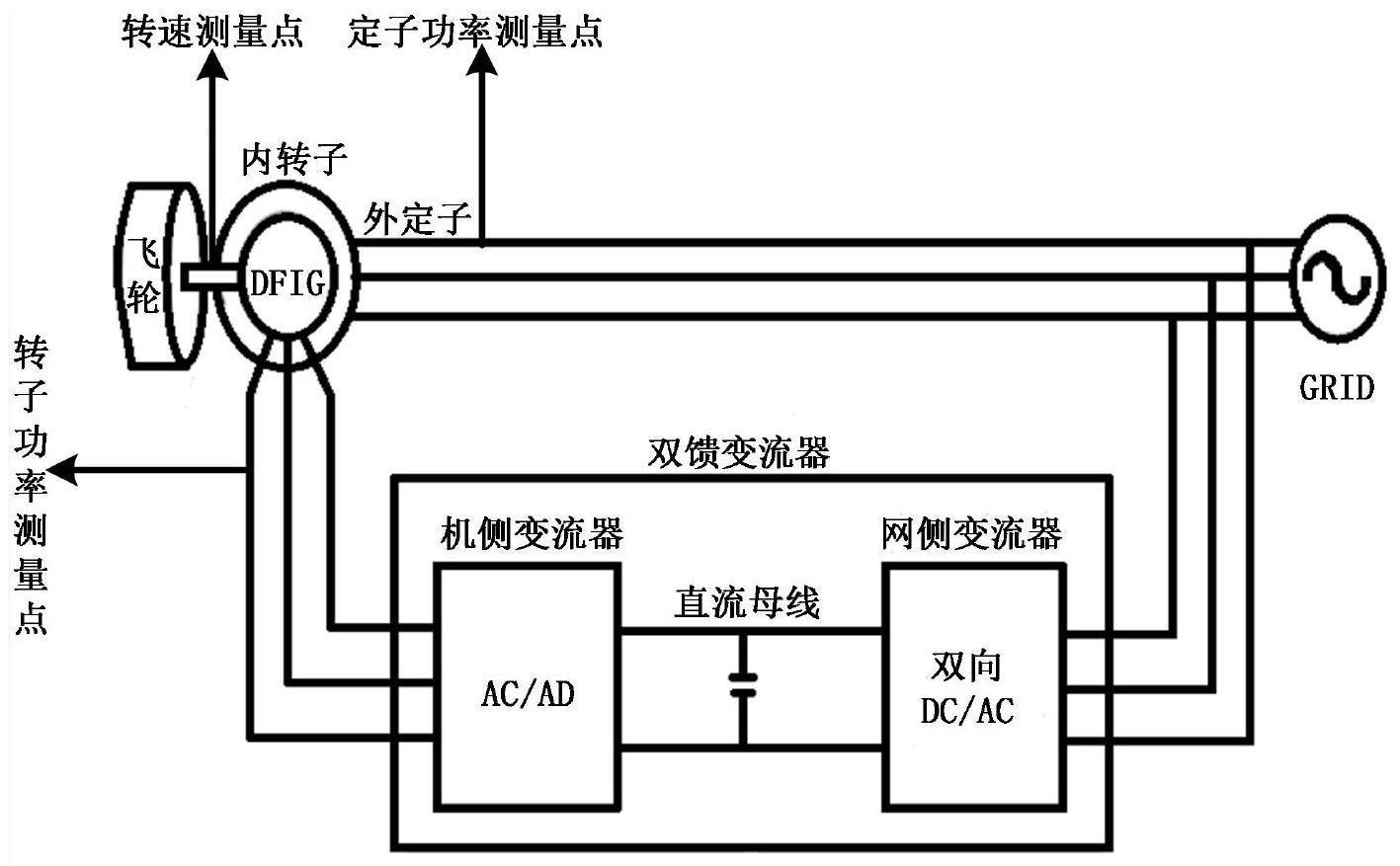
1、双馈飞轮是一种由双馈电机和飞轮通过轴连接组成的新型储能装置,通过双馈电机实现电网电能和飞轮动能之间的能量双向交互。
2、随着风力发电等新能源的发展,克服新能源的发电波动性,以降低新能源并网后对电网稳定性和安全性的影响,一直是新能源并网工作的主要研究方向。双馈飞轮作为一种新型的储能装置,可以响应新能源的波动性,通过双馈电机的作用提供持续稳定的能量转化过程,因此可提高新能源电网的电能质量。同时双馈飞轮还具有快速的响应时间、很长的充放电寿命等诸多优点,因此双馈飞轮储能系统在电网系统中的应用越来越广泛。
3、其中,飞轮的转动惯量决定了双馈飞轮所能存储的电能,同时飞轮的转动惯还影响着双馈飞轮系统的响应速度,因此测量双馈飞轮的转动惯量对于双馈飞轮的应用意义重大。
4、飞轮的转动惯量通常基于飞轮的结构尺寸计算得到,但是由于双馈飞轮储能系统是一组同时具有双馈电机和飞轮的复杂装置,因此很难在后期精确测量飞轮的结构尺寸,因此也就很难通过飞轮的结构尺寸精确计算得到飞轮的转动惯量。现有技术通常采用钢丝悬挂法或者辅助摆锤法进行测量,但是钢丝悬挂法或者辅助摆锤法都需要将飞轮单独拆下,不仅需要停机测量,而且还有很大的不便性,尤其是针对自重较大的大型飞轮时,拆装难度极大。
技术实现思路
1、为了解决上述背景技术中存在的问题,本发明提供了一种双馈飞轮转动惯量获取方法,包括:
2、s1.获取双馈电机的实时功率值p,绘制p-t曲线。定时或实时测量飞轮转动转速n。
3、s2.划定时间段,时间段起始时间点为0时刻,时间段末端时间点为t时刻。
4、s3.根据计算式得到时间段内双馈飞轮输入或输出的总功率w1。
5、s4.根据w1=η*w2,得到飞轮产生的总机械能w2,其中η为效率因子。
6、s5.获取0时刻的飞轮角速度ω1和t时刻的角速度ω2。根据得到飞轮的转动惯量j。
7、进一步的,步骤s1中p-t曲线的绘制方法包括:
8、实时测量双馈电机定子功率p1和转子功率p2,并根据p1和p2分别绘制p1-t曲线和p2-t曲线。
9、将p1-t曲线和p2-t曲线在相同时间轴上进行叠加,得到所述p-t曲线。
10、进一步的,所述定子功率p1根据定子与电网连接的线组上直接测量得到瞬时电压电流后计算得到,电流方向自双馈电机流向电网时,定子功率p1取正。
11、进一步的,所述转子功率p2根据在机侧变流器之前采集得到的瞬时电压电流后计算得到,电流方向自双馈电机流向电网时,转子功率p2取正。
12、进一步的,步骤s2中划定的时间段为p-t曲线中p值恒为正或p值恒为负的时间段。其中以双馈电机向电网输出功率为p值的正值。
13、进一步的,步骤s2中划定的时间段为m段,每一时间段的起始时间点为0m时刻,时间段末端时间点为tm时刻。步骤s5得到m时间段的转动惯量为jm。取j=(∑jm)/m,得到转动惯量j。
14、进一步的,步骤s5中获取0时刻的飞轮角速度ω1和t时刻的角速度ω2的方法包括:测量得出飞轮在0时刻的转速n1和t时刻的转速n2,通过ω=2πn计算出0时刻的角速度ω1和t时刻的角速度ω2。
15、进一步的,步骤s3中当w1≥500kw时,步骤s4中的η取值为1。
16、此外,本发明的目的之二在于提供一种双馈飞轮转动惯量获取装置,包括设置在双馈电机定子与电网连接线上的第一电流电压仪、设置双馈电机转子与变频器之间的第二电流电压仪、监测飞轮转速的转速传感器和后端处理系统。
17、其中:
18、第一电流电压仪获取定子与电网之间的瞬时电流、电压、电流流动方向,并发送至后端处理系统。
19、第二电流电压仪器获取转子与变频器之间的瞬时电流、电压、电流流动方向,并发送至后端处理系统。
20、转速传感器获取飞轮转速,并发送至后端处理系统。
21、后端处理系统根据接收的信息,基于上述的双馈飞轮转动惯量获取方法,得到飞轮的转动惯量j。
22、本发明的有益效果在于:
23、1.本发明无需拆装飞轮,也无需对飞轮进行精确的尺寸测量即可获取较为精确的飞轮转动惯量。
24、2.本发明转动惯量可根据需要实时测量数据后分析获得,具有良好的时效性。
技术特征:
1.一种双馈飞轮转动惯量获取方法,其特征在于,包括:
2.根据权利要求1所述双馈飞轮转动惯量获取方法,其特征在于,步骤s1中p-t曲线的绘制方法包括:
3.根据权利要求2所述双馈飞轮转动惯量获取方法,其特征在于,所述定子功率p1根据定子与电网连接的线组上直接测量得到瞬时电压电流后计算得到,电流方向自双馈电机流向电网时,定子功率p1取正。
4.根据权利要求2所述双馈飞轮转动惯量获取方法,其特征在于,所述转子功率p2根据在机侧变流器之前采集得到的瞬时电压电流后计算得到,电流方向自双馈电机流向电网时,转子功率p2取正。
5.根据权利要求1所述双馈飞轮转动惯量获取方法,其特征在于,步骤s2中划定的时间段为p-t曲线中p值恒为正或p值恒为负的时间段;其中以双馈电机向电网输出功率为p值的正值。
6.根据权利要求5所述双馈飞轮转动惯量获取方法,其特征在于,步骤s2中划定的时间段为m段,每一时间段的起始时间点为0m时刻,时间段末端时间点为tm时刻;步骤s5得到m时间段的转动惯量为jm;取j=(∑jm)/m,得到转动惯量j。
7.根据权利要求1所述双馈飞轮转动惯量获取方法,其特征在于,步骤s5中获取0时刻的飞轮角速度ω1和t时刻的角速度ω2的方法包括:测量得出飞轮在0时刻的转速n1和t时刻的转速n2,通过ω=2πn计算出0时刻的角速度ω1和t时刻的角速度ω2。
8.根据权利要求1所述双馈飞轮转动惯量获取方法,其特征在于,步骤s3中当w1≥500kw时,步骤s4中的η取值为1。
9.一种双馈飞轮转动惯量获取装置,其特征在于,包括设置在双馈电机定子与电网连接线上的第一电流电压仪、设置双馈电机转子与变频器之间的第二电流电压仪、监测飞轮转速的转速传感器和后端处理系统;其中:
技术总结
本发明提供了一种双馈飞轮转动惯量获取方法,包括:S1.获取双馈电机的实时功率值P,绘制P‑T曲线。定时或实时测量飞轮转动转速n。S2.划定时间段,时间段起始时间点为0时刻,时间段末端时间点为t时刻。S3.根据计算式得到时间段内双馈飞轮输入或输出的总功率W<subgt;1</subgt;。S4.根据W<subgt;1</subgt;=η*W<subgt;2</subgt;,得到飞轮产生的总机械能W<subgt;2</subgt;,其中η为效率因子。S5.获取0时刻的飞轮角速度ω<subgt;1</subgt;和t时刻的角速度ω<subgt;2</subgt;。根据得到飞轮的转动惯量J。本发明无需拆装飞轮,也无需对飞轮进行精确的尺寸测量即可获取较为精确的飞轮转动惯量。
技术研发人员:孙册,白宁,尹进峰,孙璇,刘雨涵
受保护的技术使用者:国家电投集团科学技术研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!