一种用于低速域下的永磁同步电机转子位置估计方法
本发明涉及永磁同步电机转子位置估计领域,尤其是涉及一种用于低速域下的永磁同步电机转子位置估计方法。
背景技术:
1、无位置传感器控制技术是一种通过实时分析永磁同步电机端口电压和电流,获取转子位置信息的方法,它能够有效地减少永磁同步电机驱动控制系统的硬件复杂度,提高驱动控制系统的集成性,缩减驱动控制系统的空间占用等重要优势。这种技术手段一般需要通过采样分析电机中的电信号来估计永磁同步电机的位置和速度信息。由于低速域工况下反电势很微弱,用于中高速域下的无位置传感器控制方法会失效。脉振高频注入法的提出有效地解决了永磁同步电机在零低速域工况下启动困难的问题,该方法利用高频电压矢量激发永磁同步电机转子的凸极效应并提取位置或转速信息,且与电机参数无关,具有很好的鲁棒性。
2、传统的脉振高频注入法控制策略存在着如下几点不足:
3、1、由于使用低通滤波器以及带通滤波器,使得信号出现相位上的延迟,为此专利(cn115224999a,基于脉振高频注入法的永磁电机转子位置和速度估算方法)以及文献(陈景文等,基于改进高频注入法的pmsm转速检测方法[j].陕西科技大学学报,2021,39(06))提出了改进方案,此类方案是针对传统脉振高频注入法信号处理的不足,利用准比例谐振滤波器或者广义二阶积分器(sogi)对转子位置误差信号进行提取,但通过pi控制器对误差信号进行提取总体辨识的误差仍然较大。
4、2、在位置与速度信号提取上使用传统的pi控制器,收敛速度较慢,动态性能欠佳,为此文献(王菁,颜建虎,季国东等.一种基于双位置观测器的永磁同步电机低速无位置传感器控制方法[j].电工技术学报,2023,38(02))在这方面做出改进。该文献针对误差信号提取,利用二阶滑模观测器对pi控制器输出的位置信息进一步处理,但是这种方法结构上比较复杂。
5、综上,传统脉振高频注入法在永磁同步电机位置估计方面存在较大的误差、较差的动态性能和较慢的收敛速度,并且还需要增加滤波器造成位置估计相位延迟。因此,设计一种能够减小转速波动、提高转速和位置收敛速度的方法成为亟待解决的问题。
技术实现思路
1、本发明的目的是克服上述现有技术存在的缺陷而提供一种用于低速域下的永磁同步电机转子位置估计方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种用于低速域下的永磁同步电机转子位置估计方法,包括以下步骤:
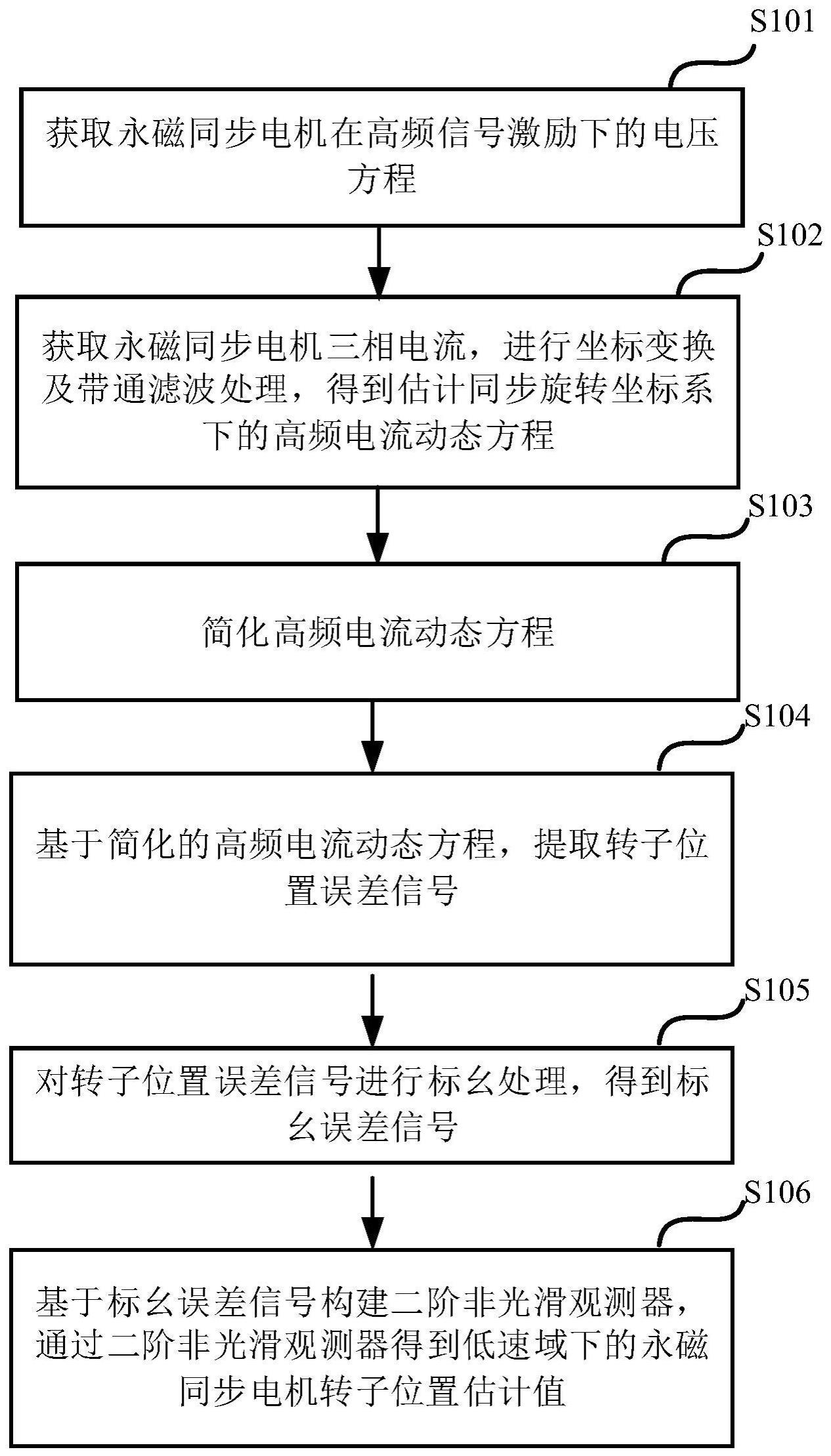
4、s1、获取永磁同步电机在高频信号激励下的电压方程;
5、s2、获取永磁同步电机三相电流,并对所述三相电流进行坐标变换及带通滤波处理,得到估计同步旋转坐标系下的高频电流动态方程;
6、s3、简化所述高频电流动态方程;
7、s4、基于简化的高频电流动态方程,提取转子位置误差信号;
8、s5、对所述转子位置误差信号进行标幺处理,得到标幺误差信号;
9、s6、基于所述标幺误差信号构建二阶非光滑观测器,通过所述二阶非光滑观测器得到低速域下的永磁同步电机转子位置估计值。
10、进一步地,步骤s1中,永磁同步电机的电压方程在同步旋转坐标系d-q下的表达式为:
11、
12、式中为同步旋转d轴高频电压信号、为同步旋转q轴高频电压信号,同步旋转d轴高频电流的变化量,为同步旋转q轴高频电流的变化量,ldh为同步旋转d轴高频激励下的电感,lqh为同步旋转q轴高频激励下的电感;ts为电压信号采样时间。
13、进一步地,步骤s2中,所述估计同步旋转坐标系下的高频电流动态方程即高频电流与电压的关系,其表达式为:
14、
15、式中,为估计同步旋转轴的电压高频分量;为估计同步旋转轴的电压高频分量;为估计同步旋转轴下高频电流的变化量;为估计同步旋转轴下高频电流的变化量;δθ为实际坐标系与估计坐标系间的估计误差,即实际转子位置θe与估计转子位置之差。
16、进一步地,步骤s3中,在估计同步旋转轴中,注入余弦信号以替换步骤s2中同步旋转轴的电压高频分量
17、基于注入的余弦信号将高频电流动态方程简化为:
18、
19、式中,δl=(lqh-ldh)/2,l=(lqh+ldh)/2;为注入余弦信号,为注入余弦信号后估计同步旋转轴下高频电流的变化量,为注入余弦信号后估计同步旋转轴下高频电流的变化量。
20、进一步地,步骤s4中,所述转子位置误差信号f(δθ)的表达式为:
21、
22、式中,θe为实际转子位置,为估计转子位置。
23、进一步地,步骤s5中,基于所述转子位置误差信号,得到标幺误差信号的表达式为:
24、
25、进一步地,步骤s6中,基于所述标幺误差信号,构建二阶非光滑观测器的表达式为:
26、
27、式中,为估计的转子位置,为估计的转子角速度;δθ为标幺误差信号,为q轴参考电流;kt=1.5pnφf为转矩常数,其中pn、φf为永磁同步电机磁极对数与磁链;α、β为决定观测器特性的参数;ι1、ι2为增益系数;
28、进一步地,所述增益系数ι1、ι2为正的增益系数,用于调节估计转子位置的动态性能,ι1越大,估计转子位置收敛速度越快;ι2越大,估计转子位置稳态误差越小。
29、进一步地,α、β的取值满足以下条件:
30、α∈(1/2,1),β=2α-1
31、若α越趋向于1,观测器的特性越接近于传统的pi观测器,若α越趋向于0.5,观测器的特性越接近于超螺旋观测器。
32、与现有技术相比,本发明具有以下有益效果:
33、1、本发明提出的用于低速域下的永磁同步电机转子位置估计方法,可有效减少传统脉振高频注入法位置速度信息提取时的高频噪声,简化位置速度信息提取模块结构,提高位置速度信息提取精度。
34、2、本发明提出的用于低速域下的永磁同步电机转子位置估计方法,可以使误差信号有限时间收敛,对比传统脉振高频注入法位置速度信息提取时采用的pi观测器可以更快收敛且稳态误差更小。
技术特征:
1.一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s1中,永磁同步电机的电压方程在同步旋转坐标系d-q下的表达式为:
3.根据权利要求1所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s2中,所述估计同步旋转坐标系下的高频电流动态方程即高频电流与电压的关系,其表达式为:
4.根据权利要求3所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s3中,在估计同步旋转轴中,注入余弦信号以替换步骤s2中同步旋转轴的电压高频分量
5.根据权利要求4所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s3中,基于注入的余弦信号将高频电流动态方程简化为:
6.根据权利要求1所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s4中,所述转子位置误差信号f(δθ)的表达式为:
7.根据权利要求1所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s5中,基于所述转子位置误差信号,得到标幺误差信号的表达式为:
8.根据权利要求1所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,步骤s6中,基于所述标幺误差信号,构建二阶非光滑观测器的表达式为:
9.根据权利要求8所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,所述增益系数ι1、ι2为正的增益系数,用于调节估计转子位置的动态性能,ι1越大,估计转子位置收敛速度越快;ι2越大,估计的转子位置稳态误差越小。
10.根据权利要求8所述的一种用于低速域下的永磁同步电机转子位置估计方法,其特征在于,α、β的取值满足以下条件:
技术总结
本发明涉及一种用于低速域下的永磁同步电机转子位置估计方法,包括以下步骤:获取永磁同步电机在高频信号激励下的电压方程;获取永磁同步电机三相电流,并对三相电流进行坐标变换及带通滤波处理,得到估计同步旋转坐标系下的高频电流动态方程;简化高频电流动态方程;基于简化的高频电流动态方程,提取转子位置误差信号;对转子位置误差信号进行标幺处理,得到标幺误差信号;基于标幺误差信号构建二阶非光滑观测器,通过二阶非光滑观测器得到低速域下的永磁同步电机转子位置估计值。与现有技术相比,本发明具有精度高、收敛速度快、稳态误差小等优点。
技术研发人员:冒建亮,黄佳佳,徐霆,曹忠昆,张传林,夏飞
受保护的技术使用者:上海电力大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!