双轴一体驱动器同步控制方法及装置与流程
本发明涉及电机控制,具体涉及双轴一体驱动器同步控制方法及装置。
背景技术:
1、现有技术,应用于龙门机构的伺服同步控制方法及系统,龙门机构由两套伺服系统共同驱动,两套伺服系统中的任一台伺服驱动器通过比较其所控制的伺服电机和另外一台伺服电机位置关系,调整其所控制的伺服电机的速度,实现两电机的同步。
2、现有技术缺点:1、需要2个独立伺服外部物理接线,导致操作复杂,可靠性变低;
3、2、需要2个独立伺服去进行数据交互,同步实时性不够;3、其中一个轴出故障报警停止后,另外一个轴不具备同步跟随停止的功能算法。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中,需要2个独立伺服外部物理接线,导致操作复杂,可靠性变低;需要2个独立伺服去进行数据交互,同步实时性不够;其中一个轴出故障报警停止后,另外一个轴不能进行同步跟随停止的问题,从而提供双轴一体驱动器同步控制方法及装置。
2、为解决上述技术问题,本发明公开实施例至少提供双轴一体驱动器同步控制方法及装置。
3、第一方面,本发明公开实施例提供了双轴一体驱动器同步控制方法,包括:
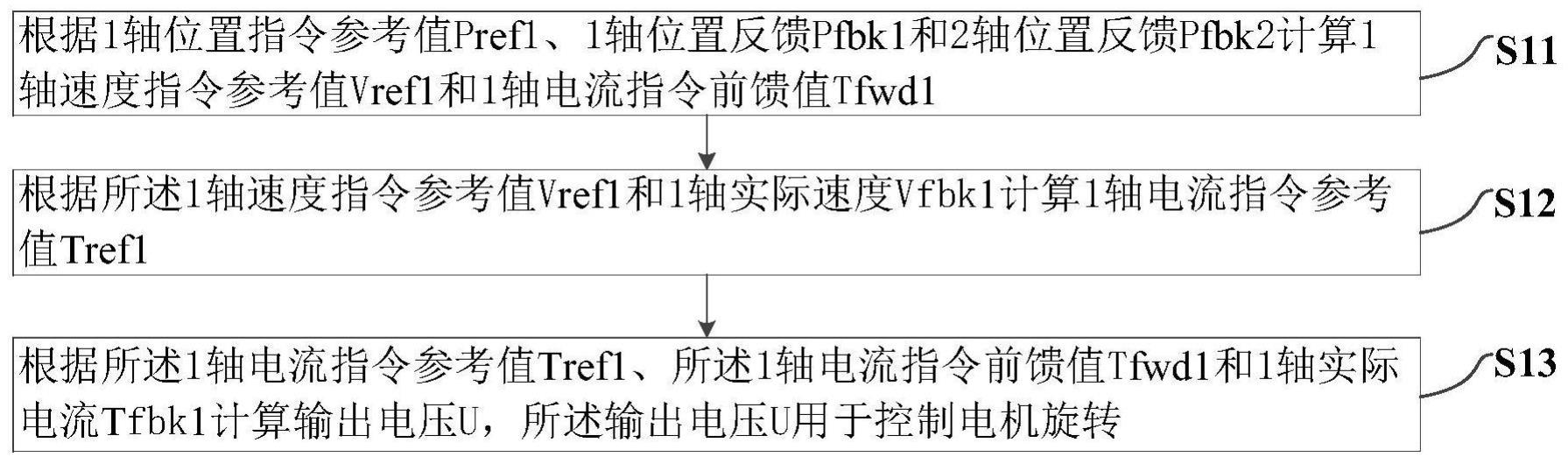
4、根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1;
5、根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1;
6、根据所述1轴电流指令参考值tref1、所述1轴电流指令前馈值tfwd1和1轴实际电流tfbk1计算输出电压u,所述输出电压u用于控制电机旋转。
7、可选地,所述根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1,包括:
8、err1=pref1-pfbk1
9、err2=pfbk1-pfbk2
10、
11、
12、式中,kp为比例系数,ki为积分系数,kpm为两轴差值比例系数,(k)表示在k时刻的数据,t表示时间,lpf为滤波器,kf为第一前馈系数和kfm为第二前馈系数。
13、可选地,所述根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1,包括:
14、err3=vref1-vfbk1
15、
16、式中,kp1为比例系数,ki1为积分系数和(k)表示在k时刻的数据。
17、可选地,所述根据所述1轴电流指令参考值tref1、所述1轴电流指令前馈值tfwd1和1轴实际电流tfbk1计算输出电压u,包括:
18、err4=tref1+tfwd1-tfbk1
19、
20、式中,kp2为比例系数,ki2为积分系数和(k)表示在k时刻的数据。
21、第二方面,本发明公开实施例还提供双轴一体驱动器同步控制装置,包括:
22、第一计算模块,用于根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1;
23、第二计算模块,用于根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1;
24、第三计算模块,用于根据所述1轴电流指令参考值tref1、所述1轴电流指令前馈值tfwd1和1轴实际电流tfbk1计算输出电压u,所述输出电压u用于控制电机旋转。
25、可选地,所述根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1,包括:
26、err1=pref1-pfbk1
27、err2=pfbk1-pfbk2
28、
29、
30、式中,kp为比例系数,ki为积分系数,kpm为两轴差值比例系数,(k)表示在k时刻的数据,t表示时间,lpf为滤波器,kf为第一前馈系数和kfm为第二前馈系数。
31、可选地,所述根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1,包括:
32、err3=vref1-vfbk1
33、
34、式中,kp1为比例系数,ki1为积分系数和(k)表示在k时刻的数据。
35、第三方面,本发明公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
36、第四方面,本发明公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
37、本发明的实施例提供的技术方案可以具有以下有益效果:
38、根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1;根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1;根据所述1轴电流指令参考值tref1、所述1轴电流指令前馈值tfwd1和1轴实际电流tfbk1计算输出电压u,所述输出电压u用于控制电机旋转,本发明设计双轴一体的伺服驱动器,可同时控制两个伺服电机,适用于使用双电机驱动的龙门机构,无需额外接线即可实现龙门同步功能;内部具有优化的龙门同步算法,具有高实时性以及高动态响应性,可在一个伺服周期内把两个伺服电机的位置,速度,转矩电流信息进行交叉运算,具有优良的双轴同步性能;同时针对龙门应力不一致情况,可以无需外部应力检测机构,内部通过检测两个电机之间的转矩电流数据即可间接得到龙门力矩差;针对龙门所需求的同步性,当其中一个电机发生异常时候,通过内部的同步跟随算法进行同步跟随停止,来确保两个电机之间的位置同步;当其中一个电机发生异常时候,通过内部的同步跟随算法进行同步跟随停止,来确保两个电机之间的位置同步;当前轴以报警轴的位置反馈作为位置指令进行跟随控制,能确保两轴之间的同步偏差是受控的,进而保证龙门之间的位置偏差最小,保护龙门机构不受外力损坏;通过两个龙门轴共享的位置,速度,电流数据,经过内部的龙门同步跟踪模块,实现了同步偏差动态及稳态最优。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.双轴一体驱动器同步控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述1轴电流指令参考值tref1、所述1轴电流指令前馈值tfwd1和1轴实际电流tfbk1计算输出电压u,包括:
5.双轴一体驱动器同步控制装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述根据1轴位置指令参考值pref1、1轴位置反馈pfbk1和2轴位置反馈pfbk2计算1轴速度指令参考值vref1和1轴电流指令前馈值tfwd1,包括:
7.根据权利要求5所述的装置,其特征在于,所述根据所述1轴速度指令参考值vref1和1轴实际速度vfbk1计算1轴电流指令参考值tref1,包括:
8.一种计算机设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至4中任一项所述的方法。
9.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至4中任一项所述的方法。
技术总结
本申请公开提供了双轴一体驱动器同步控制方法及装置,其中,该方法包括:根据1轴位置指令参考值Pref1、1轴位置反馈Pfbk1和2轴位置反馈Pfbk2计算1轴速度指令参考值Vref1和1轴电流指令前馈值Tfwd1;根据所述1轴速度指令参考值Vref1和1轴实际速度Vfbk1计算1轴电流指令参考值Tref1;根据所述1轴电流指令参考值Tref1、所述1轴电流指令前馈值Tfwd1和1轴实际电流Tfbk1计算输出电压U,所述输出电压U用于控制电机旋转,解决了现有技术中,其中一个轴出故障报警后,另外一个轴不能进行同步跟随停止的问题。
技术研发人员:廖志辉,王远洋
受保护的技术使用者:深圳市杰美康机电有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!