一种电力高压线除冰机器人的制作方法
本发明涉及电力除冰设备,具体为一种电力高压线除冰机器人。
背景技术:
1、高压线除冰机器人,即通过机器人的自动行走将高压线外表面的冰块去除,既可避免人工高危作业,又能提高救灾抢险效率。然而,现有技术中的电力高压线除冰机器人存在以下问题:
2、目前,现有技术中的电力高压线除冰机器人在对高压线进行除冰时,大多通过加热的方式使高压线外表面的冰块融化,然而,现有的技术无法使高压线外表面的冰块均匀受热,同时,现有的技术无法均匀的去除升温后的冰块,从而导致高压线的除冰效果较差,针对上述问题,发明人提出一种电力高压线除冰机器人用于解决上述问题。
技术实现思路
1、为了解决高压线除冰机器人无法使高压线外表面的冰块均匀受热的问题;本发明的目的在于提供一种电力高压线除冰机器人。
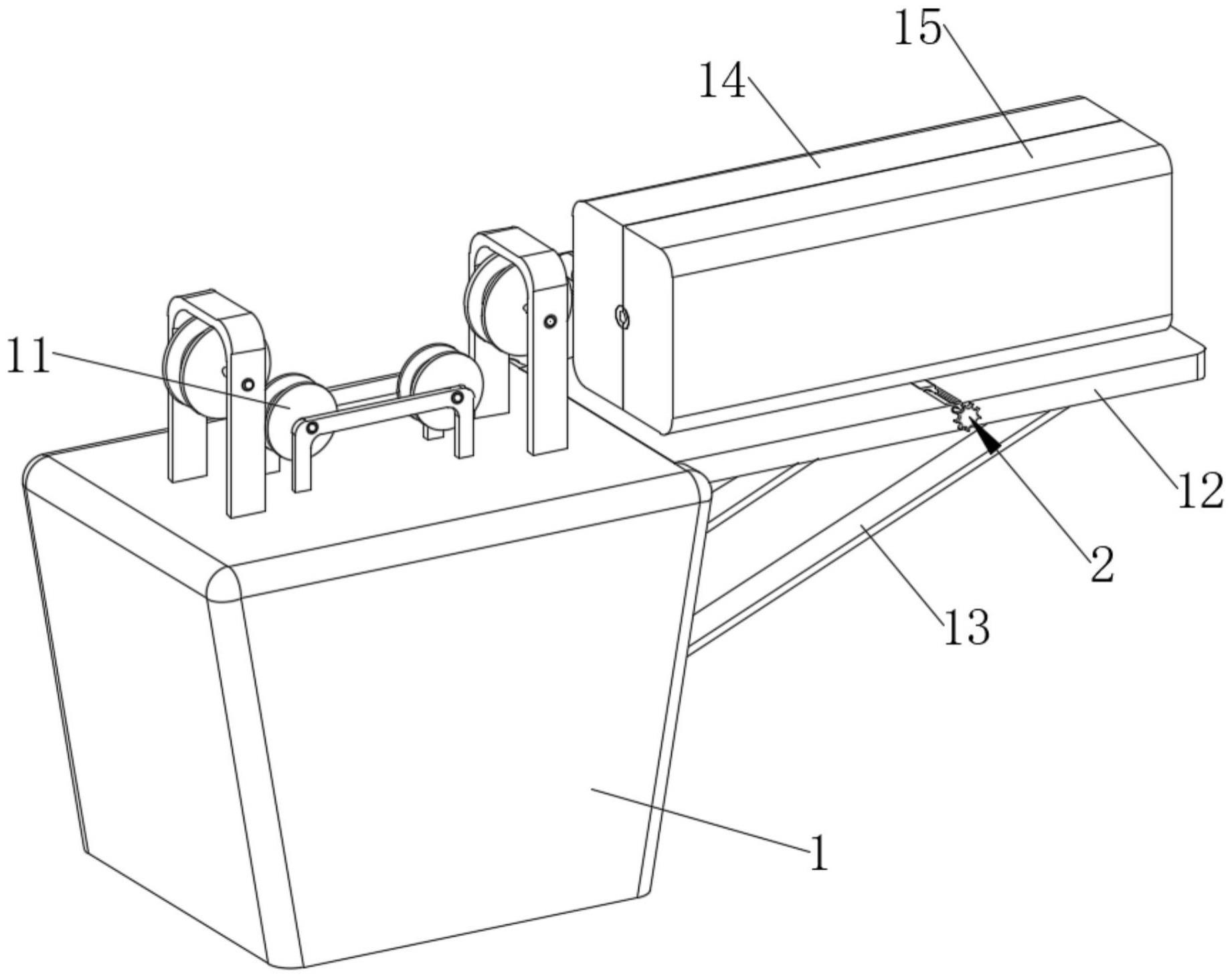
2、为解决上述技术问题,本发明采用如下技术方案:一种电力高压线除冰机器人,包括机器人本体,所述机器人本体的上表面固定安装有行走装置,所述机器人本体的一侧固定安装有平台板,所述平台板的上表面分别设有第一设备框和第二设备框,所述第一设备框和第二设备框的两侧均开设有两个半圆槽,所述半圆槽的内壁固定安装有半圆弹性垫,相邻两个所述半圆弹性垫的相对侧相互接触,所述平台板的表面设有用于第一设备框和第二设备框的分离机构,所述第一设备框和第二设备框的内部设有除冰机构,所述第一设备框和第二设备框的内部还设有驱动机构。
3、优选地,所述平台板远离第一设备框的一面固定安装有两个支撑架,两个所述支撑架远离平台板的一端和机器人本体的一侧固定连接,所述第一设备框和第二设备框的内壁及平台板的表面均开设有均匀分布的通槽。
4、优选地,所述分离机构包括有双头螺杆,所述双头螺杆的一端和平台板的一侧转动连接,所述平台板的上表面开设有滑槽,所述滑槽的内壁滑动连接有两个滑块,一个所述滑块的上表面和第一设备框的下表面固定连接,另一个所述滑块的上表面和第二设备框的下表面固定连接,所述双头螺杆贯穿滑槽并和两个滑块螺纹转动连接,所述双头螺杆的一端固定安装有手柄。
5、优选地,所述除冰机构包括有第一半圆块和第二半圆块,所述第一半圆块的一侧和第二半圆块的一侧活动接触,所述第一半圆块的一侧开设有两个插接孔,所述第二半圆块的一侧固定安装有两个插接杆,所述插接杆和插接孔的内壁活动插接,所述第一半圆块和第二半圆块的内壁均固定安装有半圆导轨,两个所述半圆导轨的相对侧活动接触,两个所述半圆导轨的内壁均滑动连接有弧形块,两个所述弧形块的相对侧均固定安装有半圆齿环,两个所述半圆齿环的相对侧活动接触,一个所述半圆齿环的一侧开设有两个插接槽,另一个所述半圆齿环的一侧固定安装有两个插接块,所述插接块和插接槽的内壁活动插接,一个所述弧形块的一侧固定安装有第一连接杆,所述第一连接杆的一端固定安装有第一弧面板,所述第一弧面板的内壁固定安装有加热板,所述加热板的内壁固定安装有导热板,另一个所述弧形块的一侧固定安装有第二连接杆,所述第二连接杆的一端固定安装有第二弧面板,所述第二弧面板的内壁设有均匀分布的除冰凸块,所述除冰凸块的外壁开设有均匀分布的槽口,所述第二弧面板的内壁固定安装有均匀分布的伸缩杆,所述伸缩杆的活塞端和除冰凸块的一侧固定连接,所述伸缩杆的外壁活动套设有伸缩弹簧,所述伸缩弹簧的一端和第二弧面板的内壁固定连接,所述伸缩弹簧的另一端和除冰凸块的一侧固定连接。
6、优选地,所述驱动机构包括有移动座,所述移动座的一侧固定安装有第一固定杆,所述第一固定杆远离移动座的一端和第一半圆块的外壁固定连接,所述第一设备框的内壁开设有两个第一导向槽,两个所述第一导向槽的内壁均滑动连接有第一导向块,两个所述第一导向块的一侧和移动座的另一侧固定连接,所述第二设备框的内壁开设有第二导向槽,所述第二导向槽的内壁滑动连接有第二导向块,所述第二导向块的一侧固定安装有第二固定杆,所述第二固定杆远离第二导向块的一端和第二半圆块的外壁固定连接,所述第一设备框的内壁转动安装有两个第一转动杆,两个所述第一转动杆的一端均固定安装有传动轮,两个所述传动轮之间传动连接有传动皮带,所述传动皮带的外壁固定安装有连接块,所述连接块的一侧固定安装有驱动杆,所述移动座的内壁开设有条形槽,所述驱动杆远离连接块的一端和条形槽的内壁活动接触,一个所述第一转动杆的一端固定安装有第一齿轮,所述第一设备框的一侧固定设有伺服电机,所述伺服电机的外壁固定安装有固定机架,所述固定机架的一侧和第一设备框的一侧固定连接,所述伺服电机的驱动输出端固定安装有第二转动杆,所述第二转动杆远离伺服电机的一端和第一设备框的一侧转动连接,所述第二转动杆的外壁固定安装有扇形齿轮,所述扇形齿轮和第一齿轮啮合连接,所述第一半圆块的一侧设有第三转动杆,所述第三转动杆的一端固定安装有第二齿轮,所述第二齿轮和一个半圆齿环啮合连接,所述第一半圆块的一侧还设有传动杆,所述传动杆的一端和第三转动杆的另一端均固定安装有锥齿轮,两个所述锥齿轮相互啮合,所述传动杆的另一端固定安装有第三齿轮,所述第一设备框的内壁固定安装有齿板,所述齿板和第三齿轮啮合连接。
7、优选地,所述第一半圆块的一侧固定安装有第一支撑板,所述第三转动杆贯穿第一支撑板并和第一支撑板转动连接,所述第一半圆块的一侧固定安装有第二支撑板,所述传动杆贯穿第二支撑板并和第二支撑板转动连接。
8、与现有技术相比,本发明的有益效果在于:
9、1、通过驱动第一设备框及第二设备框分离,使高压线从两组半圆弹性垫之间穿过,当第一设备框与第二设备框合拢后,高压线外表面的冰块与导热板及除冰凸块接触,从而方便的实现了第一设备框及第二设备框的分离及合拢,进而便于高压线后续的自动除冰作业;
10、2、通过驱动导热板和除冰凸块往复水平移动并同步转动,导热板往复水平移动并同步转动的同时使高压线外表面的冰块均匀受热,除冰凸块往复水平移动并同步转动的同时均匀的去除升温后的冰块,从而方便的实现了高压线外表面冰块的加热及去除,进而有效的提高了去除高压线外表面冰块的便捷性,以及有效的提高了高压线的除冰效果。
技术特征:
1.一种电力高压线除冰机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)的上表面固定安装有行走装置(11),所述机器人本体(1)的一侧固定安装有平台板(12),所述平台板(12)的上表面分别设有第一设备框(14)和第二设备框(15),所述第一设备框(14)和第二设备框(15)的两侧均开设有两个半圆槽(16),所述半圆槽(16)的内壁固定安装有半圆弹性垫(17),相邻两个所述半圆弹性垫(17)的相对侧相互接触,所述平台板(12)的表面设有用于第一设备框(14)和第二设备框(15)的分离机构(2),所述第一设备框(14)和第二设备框(15)的内部设有除冰机构(3),所述第一设备框(14)和第二设备框(15)的内部还设有驱动机构(5)。
2.如权利要求1所述的一种电力高压线除冰机器人,其特征在于,所述平台板(12)远离第一设备框(14)的一面固定安装有两个支撑架(13),两个所述支撑架(13)远离平台板(12)的一端和机器人本体(1)的一侧固定连接,所述第一设备框(14)和第二设备框(15)的内壁及平台板(12)的表面均开设有均匀分布的通槽(18)。
3.如权利要求1所述的一种电力高压线除冰机器人,其特征在于,所述分离机构(2)包括有双头螺杆(21),所述双头螺杆(21)的一端和平台板(12)的一侧转动连接,所述平台板(12)的上表面开设有滑槽(22),所述滑槽(22)的内壁滑动连接有两个滑块(23),一个所述滑块(23)的上表面和第一设备框(14)的下表面固定连接,另一个所述滑块(23)的上表面和第二设备框(15)的下表面固定连接,所述双头螺杆(21)贯穿滑槽(22)并和两个滑块(23)螺纹转动连接,所述双头螺杆(21)的一端固定安装有手柄(24)。
4.如权利要求1所述的一种电力高压线除冰机器人,其特征在于,所述除冰机构(3)包括有第一半圆块(31)和第二半圆块(32),所述第一半圆块(31)的一侧和第二半圆块(32)的一侧活动接触,所述第一半圆块(31)和第二半圆块(32)的内壁均固定安装有半圆导轨(33),两个所述半圆导轨(33)的相对侧活动接触,两个所述半圆导轨(33)的内壁均滑动连接有弧形块(34),两个所述弧形块(34)的相对侧均固定安装有半圆齿环(35),两个所述半圆齿环(35)的相对侧活动接触,一个所述弧形块(34)的一侧固定安装有第一连接杆(36),所述第一连接杆(36)的一端固定安装有第一弧面板(37),所述第一弧面板(37)的内壁固定安装有加热板(38),所述加热板(38)的内壁固定安装有导热板(39),另一个所述弧形块(34)的一侧固定安装有第二连接杆(4),所述第二连接杆(4)的一端固定安装有第二弧面板(41),所述第二弧面板(41)的内壁设有均匀分布的除冰凸块(42),所述除冰凸块(42)的外壁开设有均匀分布的槽口(43)。
5.如权利要求4所述的一种电力高压线除冰机器人,其特征在于,所述第一半圆块(31)的一侧开设有两个插接孔(311),所述第二半圆块(32)的一侧固定安装有两个插接杆(321),所述插接杆(321)和插接孔(311)的内壁活动插接,一个所述半圆齿环(35)的一侧开设有两个插接槽(351),另一个所述半圆齿环(35)的一侧固定安装有两个插接块(352),所述插接块(352)和插接槽(351)的内壁活动插接。
6.如权利要求4所述的一种电力高压线除冰机器人,其特征在于,所述第二弧面板(41)的内壁固定安装有均匀分布的伸缩杆(44),所述伸缩杆(44)的活塞端和除冰凸块(42)的一侧固定连接,所述伸缩杆(44)的外壁活动套设有伸缩弹簧(45),所述伸缩弹簧(45)的一端和第二弧面板(41)的内壁固定连接,所述伸缩弹簧(45)的另一端和除冰凸块(42)的一侧固定连接。
7.如权利要求4所述的一种电力高压线除冰机器人,其特征在于,所述驱动机构(5)包括有移动座(51),所述移动座(51)的一侧固定安装有第一固定杆(52),所述第一固定杆(52)远离移动座(51)的一端和第一半圆块(31)的外壁固定连接,所述第一设备框(14)的内壁开设有两个第一导向槽(53),两个所述第一导向槽(53)的内壁均滑动连接有第一导向块(54),两个所述第一导向块(54)的一侧和移动座(51)的另一侧固定连接,所述第二设备框(15)的内壁开设有第二导向槽(541),所述第二导向槽(541)的内壁滑动连接有第二导向块(542),所述第二导向块(542)的一侧固定安装有第二固定杆(543),所述第二固定杆(543)远离第二导向块(542)的一端和第二半圆块(32)的外壁固定连接。
8.如权利要求7所述的一种电力高压线除冰机器人,其特征在于,所述第一设备框(14)的内壁转动安装有两个第一转动杆(56),两个所述第一转动杆(56)的一端均固定安装有传动轮(57),两个所述传动轮(57)之间传动连接有传动皮带(58),所述传动皮带(58)的外壁固定安装有连接块(59),所述连接块(59)的一侧固定安装有驱动杆(6),所述移动座(51)的内壁开设有条形槽(61),所述驱动杆(6)远离连接块(59)的一端和条形槽(61)的内壁活动接触,一个所述第一转动杆(56)的一端固定安装有第一齿轮(62)。
9.如权利要求8所述的一种电力高压线除冰机器人,其特征在于,所述第一设备框(14)的一侧固定设有伺服电机(63),所述伺服电机(63)的外壁固定安装有固定机架(64),所述固定机架(64)的一侧和第一设备框(14)的一侧固定连接,所述伺服电机(63)的驱动输出端固定安装有第二转动杆(65),所述第二转动杆(65)远离伺服电机(63)的一端和第一设备框(14)的一侧转动连接,所述第二转动杆(65)的外壁固定安装有扇形齿轮(66),所述扇形齿轮(66)和第一齿轮(62)啮合连接,所述第一半圆块(31)的一侧设有第三转动杆(67),所述第三转动杆(67)的一端固定安装有第二齿轮(68),所述第二齿轮(68)和一个半圆齿环(35)啮合连接,所述第一半圆块(31)的一侧还设有传动杆(69),所述传动杆(69)的一端和第三转动杆(67)的另一端均固定安装有锥齿轮(7),两个所述锥齿轮(7)相互啮合,所述传动杆(69)的另一端固定安装有第三齿轮(71),所述第一设备框(14)的内壁固定安装有齿板(72),所述齿板(72)和第三齿轮(71)啮合连接。
10.如权利要求9所述的一种电力高压线除冰机器人,其特征在于,所述第一半圆块(31)的一侧固定安装有第一支撑板(671),所述第三转动杆(67)贯穿第一支撑板(671)并和第一支撑板(671)转动连接,所述第一半圆块(31)的一侧固定安装有第二支撑板(691),所述传动杆(69)贯穿第二支撑板(691)并和第二支撑板(691)转动连接。
技术总结
本发明公开一种电力高压线除冰机器人,涉及电力除冰设备技术领域;而本发明包括机器人本体,机器人本体的上表面固定安装有行走装置,机器人本体的一侧固定安装有平台板,平台板的上表面分别设有第一设备框和第二设备框,第一设备框和第二设备框的两侧均开设有两个半圆槽,半圆槽的内壁固定安装有半圆弹性垫;通过驱动导热板和除冰凸块往复水平移动并同步转动,导热板往复水平移动并同步转动的同时使高压线外表面的冰块均匀受热,除冰凸块往复水平移动并同步转动的同时均匀的去除升温后的冰块,从而方便的实现了高压线外表面冰块的加热及去除,进而有效的提高了去除高压线外表面冰块的便捷性,以及有效的提高了高压线的除冰效果。
技术研发人员:周宇,由嘉
受保护的技术使用者:安捷电维智能科技研究院(广州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!