桥架智能布线机器人的制作方法
本发明涉及桥架布线,具体为桥架智能布线机器人。
背景技术:
1、桥架布线就是将线缆安置在悬挂在天花板上的桥架盒之中,桥架架设完毕后铺设线缆,需要人工登高作业,即增大了安全隐患,需要大量的人工消耗,同时工时也十分漫长,铺设效率较低,为此提出桥架智能布线机器人。
技术实现思路
1、本发明的目的在于提供桥架智能布线机器人,以解决上述背景技术中提出的问题。
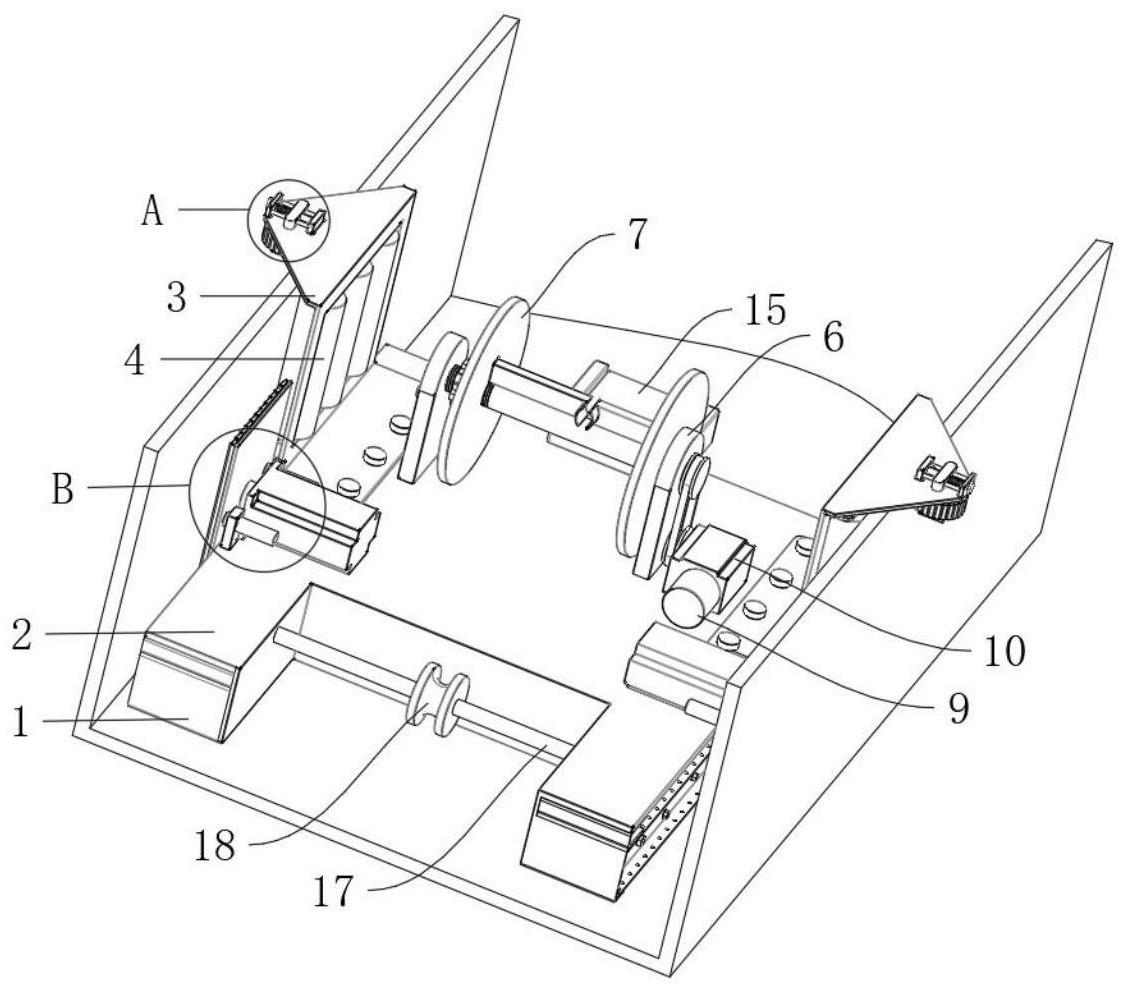
2、为实现上述目的,本发明提供如下技术方案:包括移动底盘,所述移动底盘顶端连接设置有车板,所述车板顶端两侧均连接设置有侧板,所述侧板一侧均转动设置有挤压辊,所述侧板顶端连接设置有挤压调节机构,所述车板顶端连接设置有连接架,所述连接架相互靠近的一侧转动设置有夹持牵引单元,所述夹持牵引单元一端贯穿所述连接架并连接设置有从动正时轮,所述车板顶端连接设置有伺服电机,所述伺服电机输出端连接设置有减速器,所述减速器输出轴通过联轴器连接设置有主动正时轮,所述主动正时轮与所述从动正时轮之间套设连接有正时皮带,所述车板顶端两侧均连接设置有定位机构,所述车板顶端一侧连接设置有防护槽,所述防护槽内侧连接设置有无线信号接收器,且底端连接设置有红外感应器。
3、优选的,所述夹持牵引单元包括收卷辊,所述收卷辊一端固定设置有固定限位板,且另一端滑动设置有活动限位板,所述收卷辊一端转动设置有挤压螺帽,所述挤压螺帽一侧与所述活动限位板相抵,所述固定限位板与所述活动限位板相互靠近的一侧均连接设置有限位夹,所述限位夹相互靠近的一端均连接设置有线缆夹槽。
4、优选的,所述收卷辊一端贯穿所述连接架并与所述从动正时轮连接设置。
5、优选的,所述移动底盘包括车架,所述车架内侧均转动设置有驱动轮,所述驱动轮一侧均连接设置有衔接齿轮,所述衔接齿轮之间套设连接有齿轮皮带。
6、优选的,所述驱动轮有三组,所述衔接齿轮对称连接设置在所述驱动轮一侧,所述车架一侧连接设置有伺服驱动器,所述伺服驱动器输出端贯穿所述车架,并与位于中间的所述驱动轮连接设置。
7、优选的,所述挤压调节机构包括固定架,所述固定架相互靠近的一侧连接设置有滑杆,所述滑杆中端滑动设置有移动套件,所述移动套件底端连接设置有记米轮,所述固定架相互靠近的一侧转动设置有调节螺杆,所述调节螺杆中端与所述移动套件螺纹连接,所述固定架连接设置在所述侧板顶端。
8、优选的,所述侧板顶端开设有调节孔,所述移动套件底端连接设置有连接杆,且连接杆底端贯穿调节孔并与所述记米轮转动连接。
9、优选的,所述定位机构包括电推杆,所述电推杆一端连接设置有推板,所述推板一侧连接设置有防滑层,且另一侧连接设置有导杆,所述导杆一端滑动设置有定位架,所述定位架固定设置在所述车板顶端。
10、优选的,所述车板一侧接设置有横轴,所述横轴中端转动设置有导向轮。
11、与现有技术相比,本发明的有益效果是:
12、1、本发明通过将本装置放置在桥架内,转动挤压螺帽推动活动限位板沿收卷辊滑动,从而使限位夹相互靠近,通过线缆夹槽将需要铺设的线缆头夹持固定住,然后转动调节螺杆,带动移动套件沿滑杆移动,从而带动下方的记米轮移动,直至记米轮一侧抵在桥架盒一侧,同时内部的挤压辊也起到了支撑作用,保证车辆行进稳定,然后启动伺服驱动器,带动驱动轮转动,其中通过各个驱动轮之间的衔接齿轮与齿轮皮带的连接,使移动底盘整体进行移动,从而将线缆带入桥架盒内进行铺设,同时记米轮随着侧板移动,从而沿桥架盒转动,从而计算出已经铺设线缆的长度,便于数据了解,有效的减少人力消耗,避免登高的安全隐患,同时可以计算出铺设长度,便于工作人员记录;
13、2、本发明同时还通过在牵动线缆行进一段时间后,线缆与桥架盒之间的摩擦力变大,继续牵引拉动线缆可能会发生线缆损坏,此时启动电推杆延伸,向两侧推动推板,直至两侧的防滑层与桥架盒内壁两侧相抵,从而将装置整体固定住,然后启动伺服电机,通过减速器带动主动正时轮,从而利用正时皮带带动从动正时轮进行转动,使收卷辊转动,将线缆进行收卷至收卷辊表面,缠绕一旦时间后,线缆在收卷辊上储存一定数量,然后电推杆收缩解除定位,移动底盘启动继续行进,同时伺服电机反转,带动收卷辊进行放线,进行方向铺设,在行进的过程中红外感应器检测中路径情况,一旦检测到下方为空时,则停止前进停止布线,有效的保证铺设效果,避免线缆拉扯损坏,有效的起到保护效果,可避免意外坠落。
技术特征:
1.桥架智能布线机器人,包括移动底盘(1),其特征在于:所述移动底盘(1)顶端连接设置有车板(2),所述车板(2)顶端两侧均连接设置有侧板(3),所述侧板(3)一侧均转动设置有挤压辊(4),所述侧板(3)顶端连接设置有挤压调节机构(5),所述车板(2)顶端连接设置有连接架(6),所述连接架(6)相互靠近的一侧转动设置有夹持牵引单元(7),所述夹持牵引单元(7)一端贯穿所述连接架(6)并连接设置有从动正时轮(8),所述车板(2)顶端连接设置有伺服电机(9),所述伺服电机(9)输出端连接设置有减速器(10),所述减速器(10)输出轴通过联轴器连接设置有主动正时轮(11),所述主动正时轮(11)与所述从动正时轮(8)之间套设连接有正时皮带(12),所述车板(2)顶端两侧均连接设置有定位机构(13),所述车板(2)顶端一侧连接设置有防护槽(14),所述防护槽(14)内侧连接设置有无线信号接收器(15),且底端连接设置有红外感应器(16)。
2.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述夹持牵引单元(7)包括收卷辊(71),所述收卷辊(71)一端固定设置有固定限位板(72),且另一端滑动设置有活动限位板(73),所述收卷辊(71)一端转动设置有挤压螺帽(74),所述挤压螺帽(74)一侧与所述活动限位板(73)相抵,所述固定限位板(72)与所述活动限位板(73)相互靠近的一侧均连接设置有限位夹(75),所述限位夹(75)相互靠近的一端均连接设置有线缆夹槽(76)。
3.根据权利要求2所述的桥架智能布线机器人,其特征在于:所述收卷辊(71)一端贯穿所述连接架(6)并与所述从动正时轮(8)连接设置。
4.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述移动底盘(1)包括车架(101),所述车架(101)内侧均转动设置有驱动轮(102),所述驱动轮(102)一侧均连接设置有衔接齿轮(103),所述衔接齿轮(103)之间套设连接有齿轮皮带(104)。
5.根据权利要求4所述的桥架智能布线机器人,其特征在于:所述驱动轮(102)有三组,所述衔接齿轮(103)对称连接设置在所述驱动轮(102)一侧,所述车架(101)一侧连接设置有伺服驱动器(105),所述伺服驱动器(105)输出端贯穿所述车架(101),并与位于中间的所述驱动轮(102)连接设置。
6.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述挤压调节机构(5)包括固定架(51),所述固定架(51)相互靠近的一侧连接设置有滑杆(52),所述滑杆(52)中端滑动设置有移动套件(53),所述移动套件(53)底端连接设置有记米轮(54),所述固定架(51)相互靠近的一侧转动设置有调节螺杆(55),所述调节螺杆(55)中端与所述移动套件(53)螺纹连接,所述固定架(51)连接设置在所述侧板(3)顶端。
7.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述侧板(3)顶端开设有调节孔,所述移动套件(53)底端连接设置有连接杆,且连接杆底端贯穿调节孔并与所述记米轮(54)转动连接。
8.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述定位机构(13)包括电推杆(131),所述电推杆(131)一端连接设置有推板(132),所述推板(132)一侧连接设置有防滑层(133),且另一侧连接设置有导杆(134),所述导杆(134)一端滑动设置有定位架(135),所述定位架(135)固定设置在所述车板(2)顶端。
9.根据权利要求1所述的桥架智能布线机器人,其特征在于:所述车板(2)一侧接设置有横轴(17),所述横轴(17)中端转动设置有导向轮(18)。
技术总结
本发明公开了桥架智能布线机器人,包括移动底盘,所述移动底盘顶端连接设置有车板,所述车板顶端两侧均连接设置有侧板,所述侧板一侧均转动设置有挤压辊,所述侧板顶端连接设置有挤压调节机构,所述车板顶端连接设置有连接架,所述连接架相互靠近的一侧转动设置有夹持牵引单元,所述夹持牵引单元一端贯穿所述连接架并连接设置有从动正时轮,所述车板顶端连接设置有伺服电机,所述伺服电机输出端连接设置有减速器,所述减速器输出轴通过联轴器连接设置有主动正时轮,所述主动正时轮与所述从动正时轮之间套设连接有正时皮带。本发明有效的减少人力消耗,避免登高的安全隐患,同时可以计算出铺设长度,便于工作人员记录,有效的起到保护效果。
技术研发人员:葛元榜,李书彬,彭景锋,赵浩,刘晖
受保护的技术使用者:武汉建工智能技术有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!