一种基于离散型超螺旋滑模观测器的双三相电机的控制方法
本发明属于电机控制领域,具体涉及一种基于模糊离散型超螺旋滑模观测器的双三相pmsm无传感器控制。
背景技术:
1、双三相永磁同步电机具有转矩脉动小,稳定性高,效率高等特点,在航天航空、电动汽车、船舶等需要高可靠性和高容错的领域具有广泛应用。传统的无位置传感器控制大都是使用一阶滑模观测器与超螺旋滑模观测器。一阶滑模观测器抖振大,误差大;传统的超螺旋滑模观测器虽然与一阶滑模观测器相比误差小,但由于固定增益无法兼具收敛速度快与误差小。针对这一问题,本文提出一种基于模糊离散型超螺旋滑模观测器的双三相pmsm无传感器控制。
技术实现思路
1、本发明的目的是解决传统一阶滑模观测器误差大抖振大与传统超螺旋滑模观测器固定增益无法兼具收敛速度快与误差小的问题,为此提供一种基于模糊离散型超螺旋滑模观测器的双三相pmsm无传感器控制。
2、本发明是通过以下技术手段实现上述技术目的的。
3、本发明提供的模糊离散型超螺旋滑模观测器,具体设计包括如下步骤:
4、步骤一、超螺旋算法如下:
5、
6、其中σi为系统的状态变量,ki为增益系数,δi为扰动项。各变量需满足以下关系式:
7、
8、其中μ大于0,当变量满足上式时,系统可以在有限时间内收敛到滑模面。
9、理想化表贴式双三相pmsm模型在同步旋转坐标系下有定子电流方程:
10、
11、其中有ld=lq=l,l为定子电感,ed=0,ed与eq为d-q轴上的反电势。
12、结合式(1)与定子电流方程式(3)构建sto如下:
13、
14、
15、其中与为预测的d-q轴定子电流分量,vd与vq为估计反电势,ld=lq=l,k1与k2均为滑模增益系数且大于0。
16、通常仿真都是使用连续时间系统,但是在实际的控制电路中都是数字控制,为了更加贴近实际使用离散系统搭建模型,对式(5)采用反向差分变换法得到sto的离散化电流方程:
17、
18、其中a=exp(-r/ldts),aq=exp(-r/lqts),ts为采样时间,b=(1-a)/r,bq=(1-aq)/r,r为定子电阻,与分别是观测d轴电流与q轴电流。由于是表贴式电机模型因此有ld=lq=l,l为定子电感。ud与uq分别为定子电压在d-q轴分量。vd与vq分别为d-q轴反电势。
19、在达到滑模面时,可以得到估计反电动势约等于反电动势为:
20、
21、k1与k2为滑模增益,且两个增益满足以下关系式:
22、
23、其中λ定义为中间增益且大于0。
24、步骤二、在新建的离散型超螺旋滑模观测器中加入模糊算法。模糊算法是一种依据制定的模糊规则与输入量来选择输出量,可以在系统运行时观察输入量改变输出量,定义输入量与模糊规则。
25、设定输出论域设置为[1.5 3.5],输出量有也同样划分为五个模糊集{fl(小大)fs(小小)mi(中等)zs(大小)zl(大大)},反模糊化方法选择重心法。定义模糊规则为:
26、
27、利用模糊规则得到变化滑模增益k1,利用中间增益λ与式8得到变化滑模增益k2输入到构建的离散型sto。对于转速与角度计算,在到达滑模面时可以得到vd≈0与可以得到估计转速公式和估计转子位置公式:
28、
29、但是这种方法转速误差较大,同时由于转子位置角度是由转速积分得来,随着时间加长转速误差会加剧位置误差导致系统崩溃,本文使用pll锁相环来获取估计转速和转子位置来避免这个问题。
30、利用pll锁相环技术实时追踪和估算转子位置。在系统到达滑模面时有为估计转子角,θe为实际转子角。在d-q坐标系下有:
31、
32、pll锁相环的闭环传递函数为:
33、
34、pi调节器的传递函数为:
35、
36、在经过锁相环pi调节后输出估计转速将转速积分即可得到转子角度。
37、本发明具有以下优益效果:
38、1、设计离散型超螺旋滑模观测器,采用离散型更加贴近实际硬件电路。与传统的一阶滑模观测器相比在提高精度的同时也减少了低通滤波器提高了系统的稳定性。
39、2、为了解决超螺旋滑模观测器由于固定滑模增益带来的无法兼具收敛速度快与误差小,加入模糊算法依据模糊规则和输入量改变滑模增益,达到兼具收敛速度快与误差小的优点,之后通过pll锁相环得到估计转速与转子角。
技术特征:
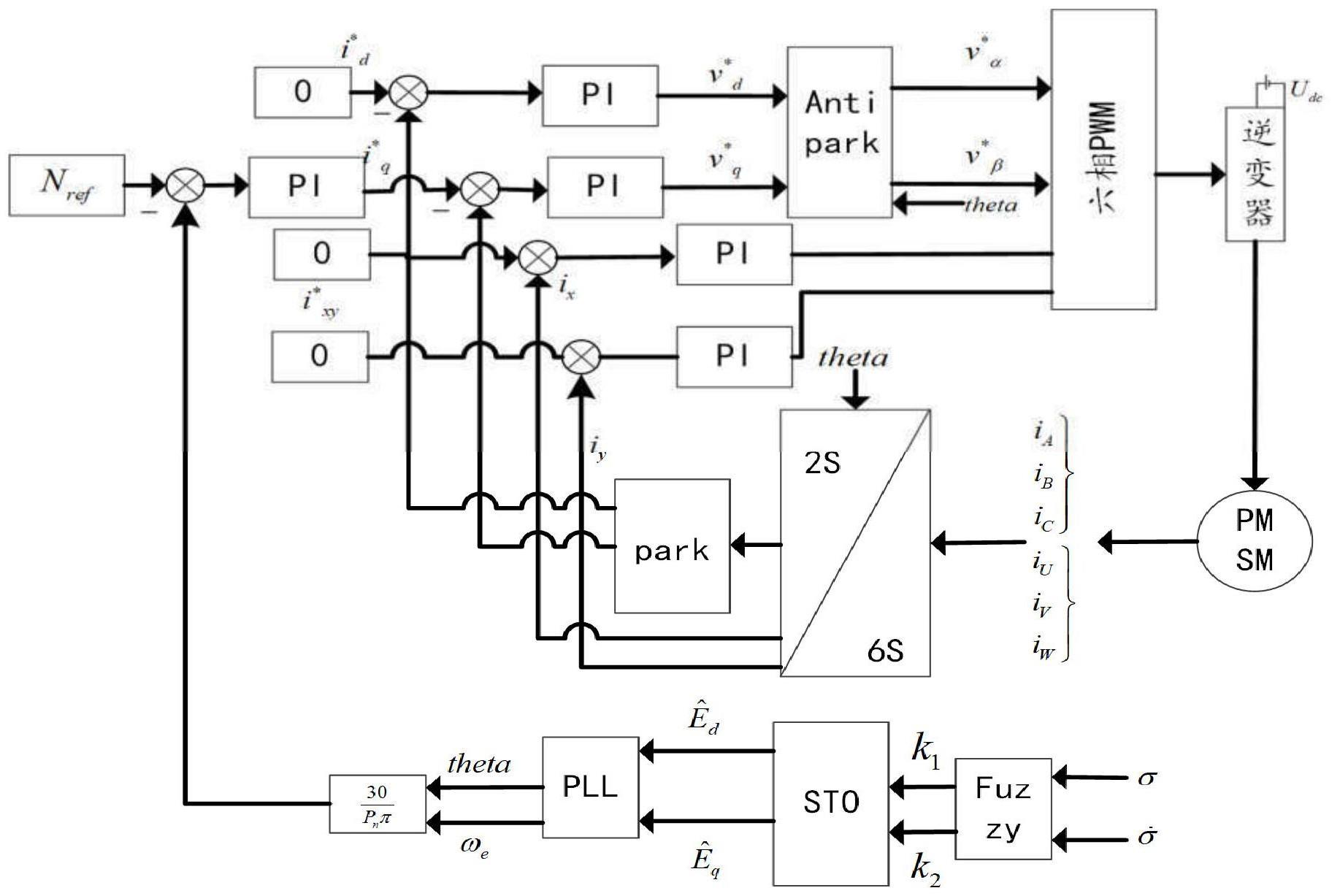
1.一种基于模糊离散型超螺旋滑模观测器sto的双三相pmsm无传感器控制方法,其特征在于,包括以下步骤:建立d-q(同步旋转坐标系)坐标系下的数学模型,设计离散型超螺旋滑模观测器得到电机转速和转子角度;加入模糊算法设计模糊规则选择滑模增益,通过得到的旋转坐标系下的反电势和pll(phase-locked loop)锁相环得到估计转速和转子角度。
2.根据权利要求1所述的方法,其特征在于,所述离散型超螺旋滑模观测器的超螺旋算法如下:
3.根据权利要求1所述的方法,其特征在于,所述模糊算法与模糊规则为:
4.根据权利要求3所述的方法,其特征在于,在系统到达滑模面时有为估计转子角,θe为实际转子角,为角度误差;在d-q坐标系下有:
技术总结
本发明公开了一种基于离散型超螺旋滑模观测器的双三相电机的控制方法,涉及电机控制领域。本发明主要包括如下步骤:建立了旋转坐标系下双三相永磁同步电机的数学模型,构建了离散型超螺旋滑模观测器,利用离散型超螺旋滑模观测器(STO)和PLL锁相环获取电机的转速与转子角度,在超螺旋滑模观测器中加入模糊算法,通过模糊规则得到变化的滑模,再通过PLL锁相环得到电机估计转速和估计转子角度。
技术研发人员:田伟,赵成骜,吉敬华
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!