一种基于已知电机参数的PI控制器系数自整定算法的制作方法
本发明涉及永磁电机控制,具体涉及一种基于已知电机参数的pi控制器系数自整定算法。
背景技术:
1、电机的pi参数整定方法是工程整定法,依靠工程经验直接在控制系统的实验中进行整定,包括:试凑法、临界比例法和一般调节法,此方法主要依靠经验的积累,且参数调试范围较大,因此往往整定用时较长。
2、但换用不同参数的电机都需要重复此方法再次进行手动整定,无法自适应不同的电机,传统的方式在进行参数调试中过程繁琐,因此本发明提供一种基于已知电机参数的pi控制器系数自整定算法。
技术实现思路
1、鉴于上述现有一种基于已知电机参数的pi控制器系数自整定算法存在的问题,提出了本发明,
2、因此,本发明目的是提供一种基于已知电机参数的pi控制器系数自整定算法,解决了永磁电机控制的问题,
3、为了实现上述目的,本发明提供如下技术方案:
4、一种基于已知电机参数的pi控制器系数自整定算法,包括有pi控制器参数整定以及二阶系统控制法,其特征在于,所述pi控制器参数整定包括以下内容:
5、首先推导出电机模型传递函数和串联结构pi控制模型传递函数,之后将电机模型传递函数的主极点与pi模型传递函数的零点相抵消,其中pi控制器输入输出表达式为:
6、output(t)=kp·e(t)+ki·∫e(t)
7、通过对其进行拉普拉斯变换,从而得出:
8、
9、从而推导出pi结构传递函数表达式为:
10、
11、通过分析电流环系统,需要进行推导电机模型传递函数,在已知旋转d-q坐标系下,则可以得知永磁同步电机两相电压方程如下:
12、
13、
14、其中电角速度ωe、d-q轴电流id、iq为均可测量,其中电感l、磁链ψf均为电机参数,对永磁同步电机动态方程作进一步优化,得
15、
16、
17、其中以d-q轴任一电压-电流方程为例,电机小信号模型为:
18、
19、将其进行拉普拉斯变换后可以得知
20、u(s)=ri(s)+ls·i(s)
21、由于电压为系统输入,电流为系统输出,故推导出电机模型的传递函数为:
22、优选地,所述pi控制器参数整定的foc控制时间周期设置为50us,根据拉普拉斯变换可得修正后的电机模型传递函数为:
23、
24、通过将时间常数τ设为50us,数值很小可以将其约等于即电机模型传递函数为:
25、
26、将pi控制器模型和电机模型结合起来,构成一个由两个一节惯性环节组成的传递函数,从q轴为例等效传递函数:
27、
28、其中iq*(s)为电流目标值的拉氏变换,iq(s)为电流测量值的拉氏变换。
29、优选地,所述pi控制器参数整定中有一个零点和两个极点,通过将零点与主极点相抵消使电机模型成为一阶系统,故零极点相消的条件为:
30、
31、抵消后的系统开环传递函数gloop(s)表达式为
32、
33、而此式为典型i型系统,通过代入闭环增益公式,化简后得到
34、
35、优选地,二阶系统控制法通过二阶系统传递函数的典型结构,转换后的表达式如下:
36、
37、将其算式与
38、
39、进行联立,从而得出
40、
41、通过选取工程阻尼比ξ的数值,从而得到电流环pi控制系数;
42、
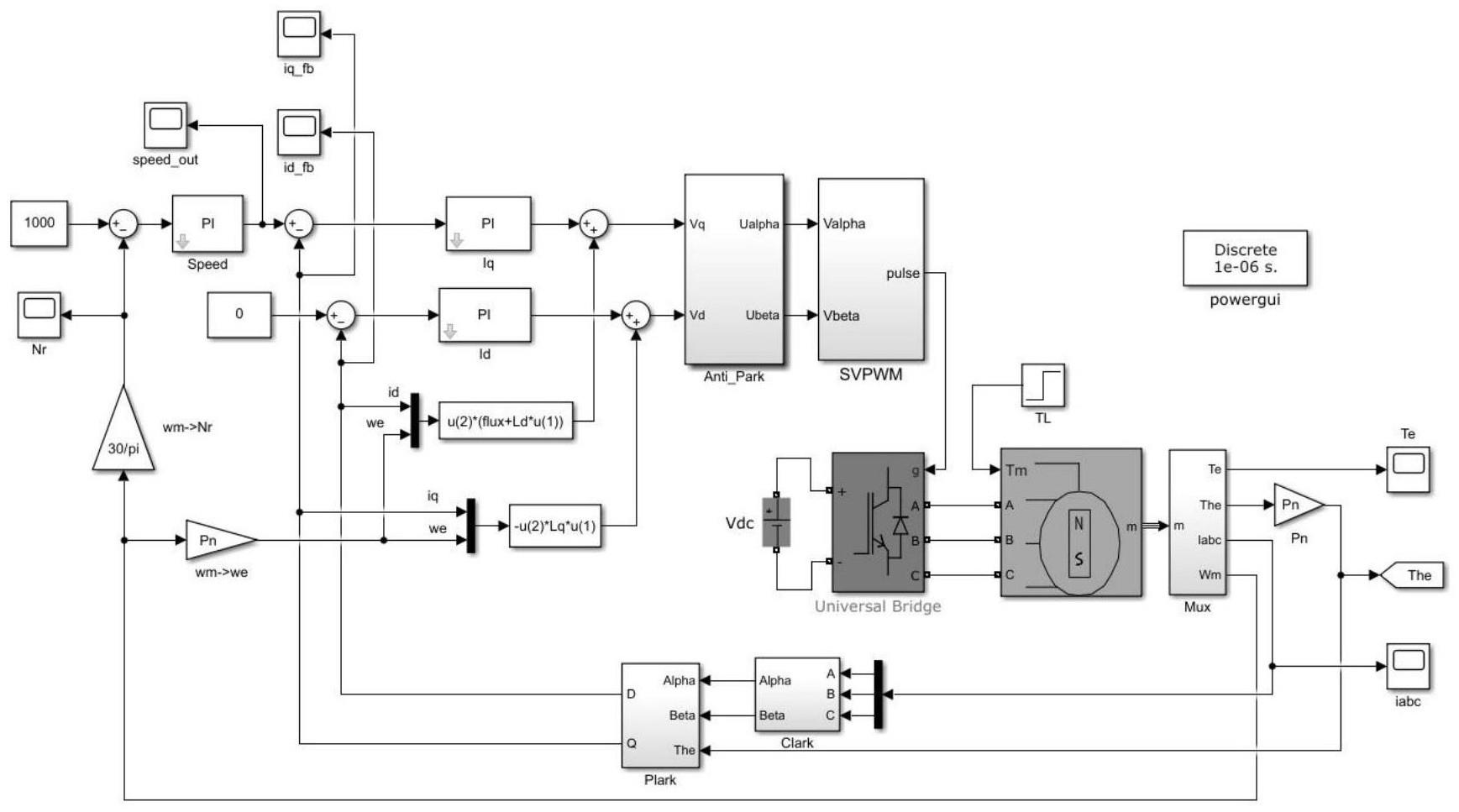
43、通过对电机模型的主极点和pi控制模型的零点进行零极点相消,避免电机系统存在二阶复极点,从而使pi控制器和电机两部分组合后的完整系统成为一个二阶系统,通过与典型的二阶传递函数比对,选取最佳工程阻尼比ξ时系统综合性能最优,联立等式推导出kp和ki的表达式,从而得出对此数学模型进行仿真,测试由推导公式计算出的kp、ki值在电机控制系统中的性能,仿真流程搭建。
44、1、本发明的数学模型计算得到的pi系数下,电流环性能良好,电机转速响应迅速,稳定运行在目标转速值附近,返回的电流值抖动较少,响应迅速,故本发明的数学模型对于已知参数的电机,可以起到很好的辅助调参作用,如在实际环境中电机存在些许抖动,可以在计算出的pi系数值附近再做调整,对比传统大范围下的经验调参,本发明可以极大的提升调参效率。
45、2、本发明从提高调参效率和自适应性的角度出发,设计数学模型将pi控制器参数整定和二阶系统最优控制法结合,实现pi参数自动整定,模型分为三个步骤,首先推导出电机模型传递函数和串联结构pi控制模型传递函数,之后将电机模型传递函数的主极点与pi模型传递函数的零点相抵消,使二阶系统变为一阶系统,最后利用二阶系统最佳阻尼比计算出kp和ki的取值,算法可以避免经验调参,减少手动调参的繁琐工作量,提升调试效率,代入合适的电机参数,选择合适的电流环带宽,可以兼容不同电机,从而提高代码的自适应性,算法复杂度不高,并且在硬件上基于cortex-m0内核实现。
技术特征:
1.一种基于已知电机参数的pi控制器系数自整定算法,包括有pi控制器参数整定以及二阶系统控制法,其特征在于,所述pi控制器参数整定包括以下内容:
2.根据权利要求1所述的一种基于已知电机参数的pi控制器系数自整定算法,其特征在于,所述pi控制器参数整定的foc控制时间周期设置为50us,根据拉普拉斯变换可得修正后的电机模型传递函数为:
3.根据权利要求1所述的一种基于已知电机参数的pi控制器系数自整定算法,其特征在于,所述pi控制器参数整定中有一个零点和两个极点,通过将零点与主极点相抵消使电机模型成为一阶系统,故零极点相消的条件为:
4.根据权利要求3所述的一种基于已知电机参数的pi控制器系数自整定算法,其特征在于,二阶系统控制法通过二阶系统传递函数的典型结构,转换后的表达式如下:
技术总结
本发明公开了一种基于已知电机参数的PI控制器系数自整定算法,涉及永磁电机控制技术领域,包括有PI控制器参数整定以及二阶系统控制法,所述PI控制器参数整定包括以下内容:首先推导出电机模型传递函数和串联结构PI控制模型传递函数,之后将电机模型传递函数的主极点与PI模型传递函数的零点相抵消,本发明的数学模型计算得到的PI系数下,电流环性能良好,电机转速响应迅速,稳定运行在目标转速值附近,返回的电流值抖动较少,响应迅速,故本发明的数学模型对于已知参数的电机,可以起到很好的辅助调参作用,如在实际环境中电机存在些许抖动,可以在计算出的PI系数值附近再做调整,对比传统大范围下的经验调参,本发明可以极大的提升调参效率。
技术研发人员:吴德钦,冉启海,王明江
受保护的技术使用者:深圳市宇思半导体有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!