一种基于棘齿的粘滑式压电步进电机
本发明涉及精密驱动与定位,尤其是涉及一种基于棘齿的粘滑式压电步进电机。
背景技术:
1、压电电机具有响应速度快、结构简单、不受电磁干扰等特点,在特殊环境下的精密驱动与定位系统中得到了广泛应用。
2、现有压电的驱动原理基本都是通过摩擦界面的摩擦力进行传动,将压电定子的周期性的微运动转化为动子的步进式运动。然而由于摩擦力变化的复杂性以及摩擦界面的不确定性,这些电机的驱动方法都存在步态不一致性且步态误差具有累积性,这种步态累积误差需要通过复杂的闭环控制系统才能实现精确定位。
3、复杂的闭环控制系统不仅需要高跨尺度高精密传感器和控制器,既昂贵又占体积,不仅增加了成本、限制了其微型化的发展,而且还会降低其在实际应用中的可靠性。
技术实现思路
1、本发明的目的是提供一种基于棘齿的粘滑式压电步进电机,实现了累积误差自消除功能,降低了运行成本,实用性更强。
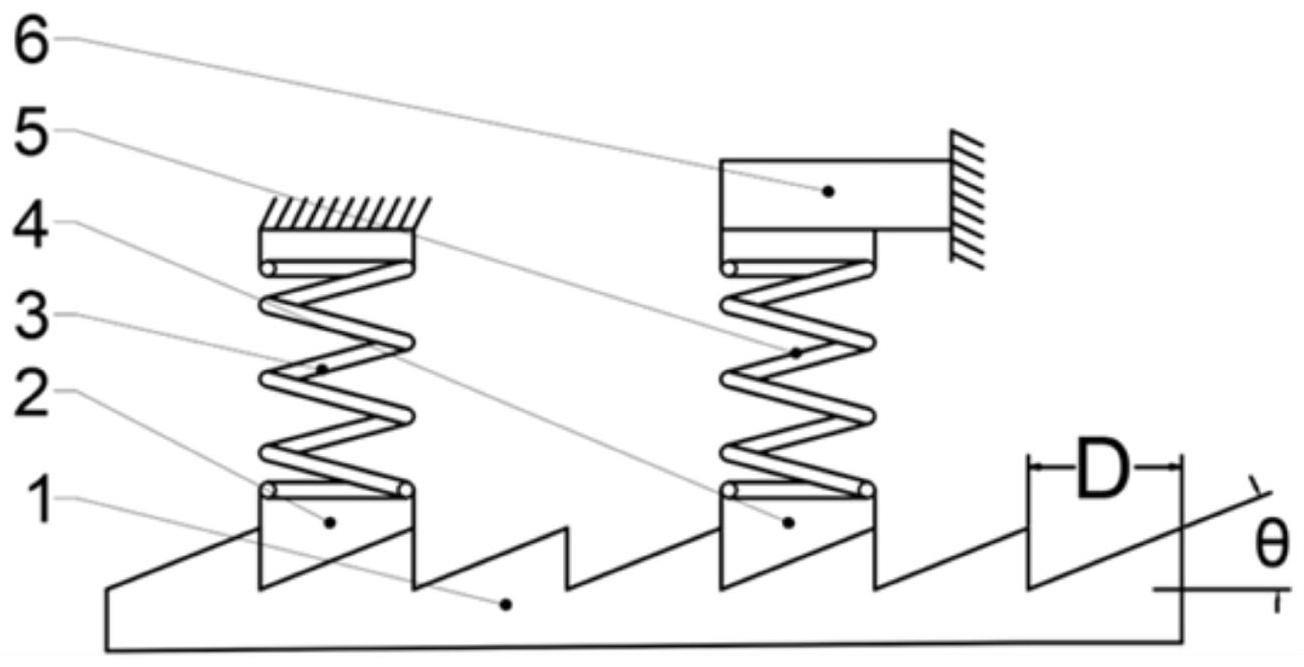
2、为实现上述目的,本发明提供了一种基于棘齿的粘滑式压电步进电机,包括动子、限位定子系统和驱动定子系统,所述动子为棘齿形微结构,所述棘齿形微结构固联于直线导轨上,所述限位定子系统由限位齿与限位弹簧组成,所述驱动定子系统由驱动齿、驱动弹簧及横向直线驱动器组成。
3、优选的,所述限位齿与所述动子中的所述棘齿形微结构相配合,所述限位弹簧固定于机架上。
4、优选的,所述驱动齿与所述动子中的所述棘齿形微结构相配合,所述横向直线驱动器固定于所述机架上,所述驱动弹簧固联于所述横向直线驱动器上。
5、优选的,初始状态下,所述驱动齿及所述限位齿在所述驱动弹簧及所述限位弹簧的预紧力作用下压在所述动子上。
6、优选的,所述驱动弹簧及所述驱动齿在水平方向上的位移始终与所述横向直线驱动器的水平位移保持一致。
7、因此,本发明采用上述一种基于棘齿的粘滑式压电步进电机,实现了累积误差自消除功能,降低了运行成本,实用性更强。
8、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于棘齿的粘滑式压电步进电机,其特征在于:包括动子、限位定子系统和驱动定子系统,所述动子为棘齿形微结构,所述棘齿形微结构固联于直线导轨上,所述限位定子系统由限位齿与限位弹簧组成,所述驱动定子系统由驱动齿、驱动弹簧及横向直线驱动器组成。
2.根据权利要求1所述的一种基于棘齿的粘滑式压电步进电机,其特征在于:所述限位齿与所述动子中的所述棘齿形微结构相配合,所述限位弹簧固定于机架上。
3.根据权利要求1所述的一种基于棘齿的粘滑式压电步进电机,其特征在于:所述驱动齿与所述动子中的所述棘齿形微结构相配合,所述横向直线驱动器固定于所述机架上,所述驱动弹簧固联于所述横向直线驱动器上。
4.根据权利要求1所述的一种基于棘齿的粘滑式压电步进电机,其特征在于:初始状态下,所述驱动齿及所述限位齿在所述驱动弹簧及所述限位弹簧的预紧力作用下压在所述动子上。
5.根据权利要求1所述的一种基于棘齿的粘滑式压电步进电机,其特征在于:所述驱动弹簧及所述驱动齿在水平方向上的位移始终与所述横向直线驱动器的水平位移保持一致。
技术总结
本发明公开了一种基于棘齿的粘滑式压电步进电机,该压电电机包括动子、限位定子系统和驱动定子系统,所述动子为棘齿形微结构,所述棘齿形微结构固联于直线导轨上,所述限位定子系统由限位齿与限位弹簧组成,所述驱动定子系统由驱动齿、驱动弹簧及横向直线驱动器组成。本发明采用上述的一种基于棘齿的粘滑式压电步进电机,实现了累积误差自消除功能,降低了运行成本,实用性更强。
技术研发人员:章阳坤,栾雨昂,陆文杰
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!