马达数据自动配置方法、装置、设备及可读存储介质与流程
本发明是关于运动控制领域,特别是关于一种马达数据自动配置方法、装置、设备及可读存储介质。
背景技术:
1、运动控制器一般提供马达,轴和坐标系等运动对象的概念,马达是指实际存在的伺服电机,轴是指在某个坐标系下的运动对象,坐标系则组成平面和空间的概念。运动控制器一般支持多种伺服驱动方式,常见的一般有pwm驱动方式,pfm驱动方式和总线驱动方式,pwm和pfm一般与硬件进行绑定,总线驱动与网卡或者asic芯片绑定,由于其控制和反馈方式的不一致,对于运动控制器而言,需要设置大量的参数来配置马达获取的数据。在运动控制器支持多种马达控制模式的场合,马达参数会更加趋于复杂,比如说需要设置马达的驱动模式,马达的反馈类型等一系列的参数,这对用户而言十分的不便。
2、因此,针对上述技术问题,有必要提供一种马达数据自动配置方法、装置、设备及可读存储介质。
3、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种马达数据自动配置方法、装置、设备及可读存储介质,其能够通过简单的通道数据和马达数据的映射,来自动配置马达参数。
2、为实现上述目的,本发明提供的技术方案如下:
3、第一方面,本发明提供了一种马达数据自动配置方法,用于运动控制器,其包括:
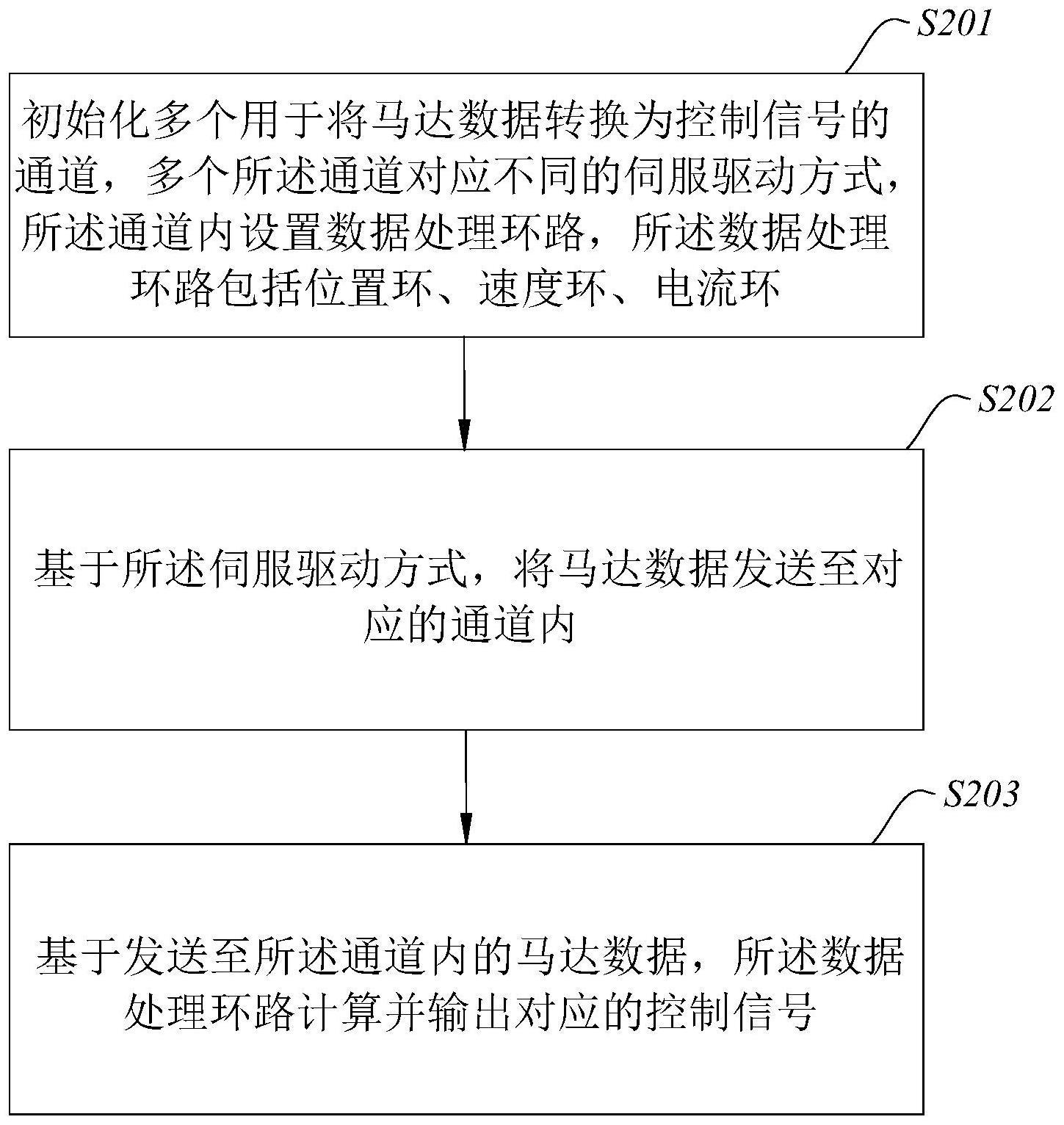
4、初始化多个用于将马达数据转换为控制信号的通道,多个所述通道对应不同的伺服驱动方式,所述通道内设置数据处理环路,所述数据处理环路包括位置环、速度环、电流环;
5、基于所述伺服驱动方式,将马达数据发送至对应的通道内;
6、基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号。
7、在一个或多个实施方式中,所述基于所述伺服驱动方式,将马达数据发送至对应的通道内,包括:
8、当所述伺服驱动方式为pwm驱动方式时,将指令pwm波电压、反馈电流、实际反馈位置、指令位置数据发送到pwm通道;
9、当所述伺服驱动方式为pfm驱动方式时,将指令pfm波电压、反馈电流、实际反馈位置、指令位置数据发送到pfm通道;
10、当所述伺服驱动方式为总线驱动方式时,读取伺服驱动器esi信息,遍历esi中pdo的数据,将其中和运动控制相关的pdo及指令位置数据发送到总线通道。
11、在一个或多个实施方式中,所述基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号,包括:
12、基于发送至所述pwm通道的马达数据,所述数据处理环路计算并输出pwm控制信号;
13、基于发送至所述pfm通道的马达数据,所述数据处理环路计算并输出pfm控制信号;
14、基于发送至所述总线通道的马达数据,输出总线控制信号。
15、在一个或多个实施方式中,所述基于发送至pwm通道的马达数据,所述数据处理环路计算并输出pwm控制信号,包括:
16、基于指定位置与实际反馈位置数据,所述位置环pid计算输出速度信号;
17、所述速度信号经速度环路pid计算输出电流信号;
18、所述电流信号与所述反馈电流信号经电流环路输出pwm控制信号。
19、在一个或多个实施方式中,所述基于发送至pfm通道的马达数据,所述数据处理环路计算并输出pfm控制信号,包括:
20、基于指定位置与实际反馈位置数据,所述位置环pid计算输出速度信号;
21、所述速度信号经速度环路pid计算输出pfm控制信号。
22、在一个或多个实施方式中,所述基于发送至所述总线通道的马达数据,输出总线控制信号,包括:
23、基于指令位置,输出总线控制信号。
24、在一个或多个实施方式中,所述方法还包括:
25、建立坐标系及与所述坐标系适配的轴;
26、选定伺服驱动方式,将所述伺服驱动方式对应的通道绑定马达,初始化马达与通道、轴、坐标系的映射关系。
27、第二方面,本发明提供了一种马达数据自动配置装置,其包括:
28、初始化模块:用于初始化多个用于将马达数据转换为控制信号的通道,多个所述通道对应不同的伺服驱动方式,所述通道内设置数据处理环路,所述数据处理环路包括位置环、速度环、电流环;
29、配置模块:用于基于所述伺服驱动方式,将马达数据发送至对应的通道内;
30、输出模块:用于基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号。
31、第三方面,本发明提供了一种计算机设备,其包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行所述的马达数据自动配置方法。
32、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行所述的马达数据自动配置方法。
33、与现有技术相比,本发明提供的马达数据自动配置方法,初始化多个用于将马达数据转换为控制信号的通道,多个所述通道对应不同的伺服驱动方式,所述通道内设置数据处理环路,所述数据处理环路包括位置环、速度环、电流环;基于所述伺服驱动方式,将马达数据发送至对应的通道内;基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号。该马达数据自动配置方法,将一种控制方式的马达数据绑定在一个通道中,然后通过通道和马达的绑定,以直接控制马达。避免了在运动控制器支持多种马达控制模式的场合,设置马达参数的复杂性和不便性。
技术特征:
1.一种马达数据自动配置方法,用于运动控制器,其特征在于,包括:
2.如权利要求1所述的马达数据自动配置方法,其特征在于,所述基于所述伺服驱动方式,将马达数据发送至对应的通道内,包括:
3.如权利要求2所述的马达数据自动配置方法,其特征在于,所述基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号,包括:
4.如权利要求3所述的马达数据自动配置方法,其特征在于,所述基于发送至pwm通道的马达数据,所述数据处理环路计算并输出pwm控制信号,包括:
5.如权利要求3所述的马达数据自动配置方法,其特征在于,所述基于发送至pfm通道的马达数据,所述数据处理环路计算并输出pfm控制信号,包括:
6.如权利要求3所述的马达数据自动配置方法,其特征在于,所述基于发送至所述总线通道的马达数据,输出总线控制信号,包括:
7.如权利要求1所述的马达数据自动配置方法,其特征在于,所述方法还包括:
8.一种马达数据自动配置装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行权利要求1-7中任一项所述的马达数据自动配置方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行权利要求1-7中任一项所述的马达数据自动配置方法。
技术总结
本发明公开了一种马达数据自动配置方法、装置、设备及可读存储介质,该马达数据自动配置方法包括:初始化多个用于将马达数据转换为控制信号的通道,多个所述通道对应不同的伺服驱动方式,所述通道内设置数据处理环路,所述数据处理环路包括位置环、速度环、电流环;基于所述伺服驱动方式,将马达数据发送至对应的通道内;基于发送至所述通道内的马达数据,所述数据处理环路计算并输出对应的控制信号。本发明提供的马达数据自动配置方法,将一种控制方式的马达数据绑定在一个通道中,然后通过通道和马达的绑定,直接控制马达。避免了在运动控制器支持多种马达控制模式的场合,设置马达参数的复杂性和不便性。
技术研发人员:刘乐勇
受保护的技术使用者:上海铼钠克数控科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!