牵引系统电压振荡抑制方法和装置与流程
本申请涉及牵引动力领域,尤其涉及一种牵引系统电压振荡抑制方法和装置。
背景技术:
1、牵引系统是地铁列车的核心装置,其稳定性直接决定地铁运营的效能。地铁牵引系统大多由直流接触网供电,直流侧出现电压持续振荡时会导致牵引电机转矩产生脉动,损害齿轮箱且影响乘坐舒适性。
2、现有技术中,为了抑制直流侧电压振荡,通常采用直轴电流补偿法或直轴电压补偿法。直轴电流补偿法或直轴电压补偿法是将直流侧电压的振荡信号经比例控制器进行缩放,以修正直轴电流指令或直轴电压指令,从而抑制牵引系统振荡的主动阻尼补偿。
3、但直轴电流补偿法或直轴电压补偿法抑制电压脉动的效果较差,且抑制用时较长。
技术实现思路
1、本申请提供一种牵引系统电压振荡抑制方法和装置,用以解决现有技术抑制直流侧电压振荡效果较差且用时较长的问题。
2、第一方面,本申请提供一种牵引系统电压振荡抑制方法,包括:
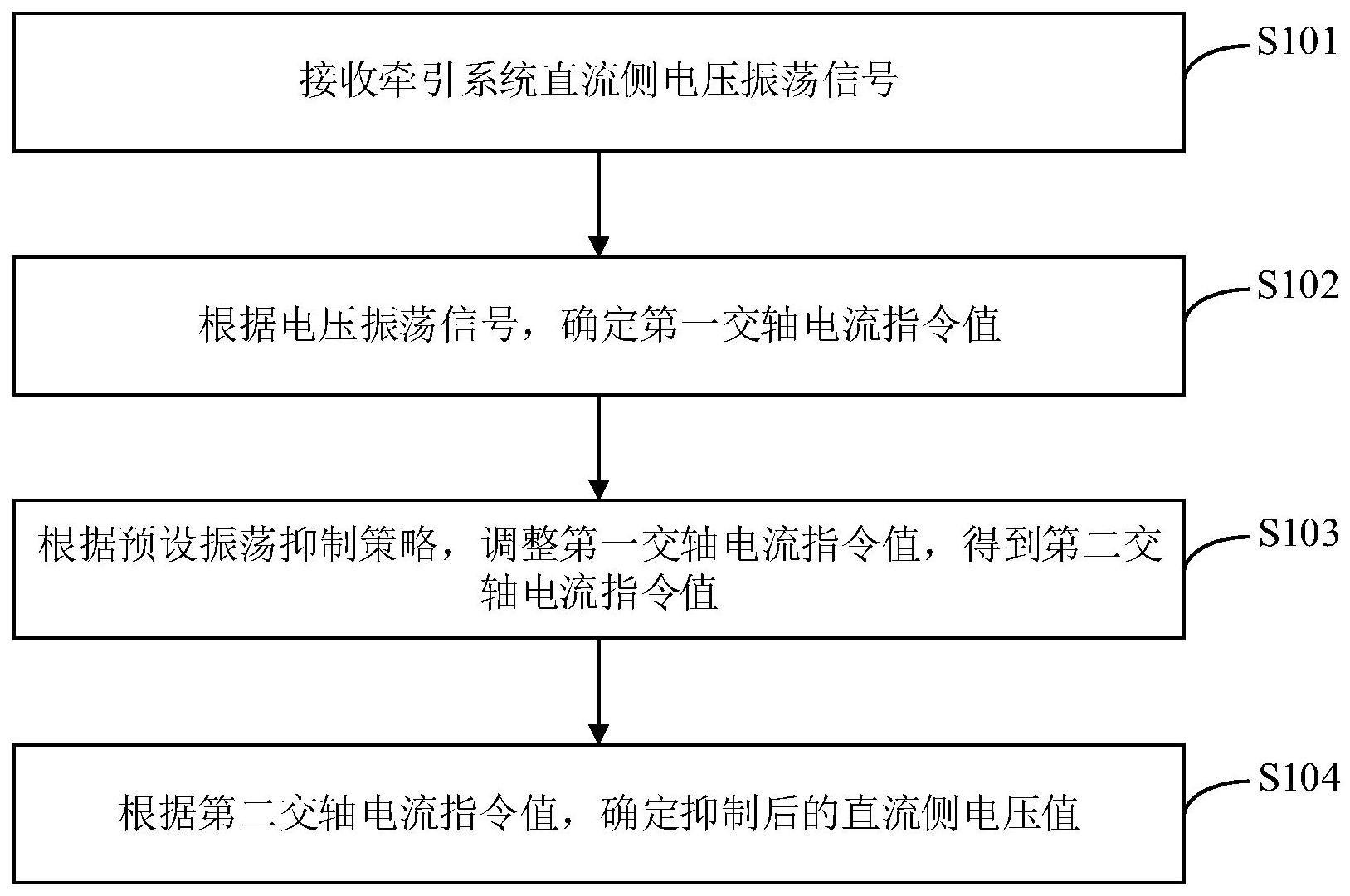
3、接收牵引系统直流侧电压振荡信号;
4、根据电压振荡信号,确定第一交轴电流指令值;
5、根据预设振荡抑制策略,调整第一交轴电流指令值,得到第二交轴电流指令值;
6、根据第二交轴电流指令值,确定抑制后的直流侧电压值。
7、一种示例中,根据预设振荡抑制策略,调整第一交轴电流指令值,得到第二交轴电流指令值,包括:
8、根据预设振荡抑制策略,确定振荡抑制系数;
9、第一交轴电流指令值与振荡抑制系数相乘,得到第二交轴电流指令值。
10、一种示例中,根据电压振荡信号,确定第一交轴电流指令值之后,还包括:
11、根据电压振荡信号,确定直轴电流指令值;
12、根据第二交轴电流指令值,确定抑制后的直流侧电压值,包括:
13、根据第二交轴电流指令值、直轴电流指令值、直轴电流反馈值以及交轴电流反馈值,确定抑制后的直流侧电压值。
14、一种示例中,根据预设振荡抑制策略,确定振荡抑制系数,包括:
15、提取电压振荡信号的直流分量和交流分量,直流分量和交流分量为预设振荡抑制策略中的变量;
16、根据直流分量和交流分量,确定振荡抑制系数。
17、第二方面,本申请提供一种牵引系统电压振荡抑制装置,包括:振荡抑制模块和复矢量控制器,振荡抑制模块的输出端与复矢量控制器的第一输入端连接;
18、振荡抑制模块,用于接收直轴电流指令值和第一交轴电流指令值,将第一交轴电流指令值与抑制振荡系数相乘,得到第二交轴电流指令值,并输出直轴电流指令值和第二交轴电流指令值;
19、复矢量控制器,用于接收振荡抑制模块输出的直轴电流指令值和第二交轴电流指令值,并根据直轴电流指令值、第二交轴电流指令值、直轴电流反馈值以及交轴电流反馈值,输出抑制后的直流侧电压值,抑制后的直流侧电压值用于控制牵引系统的逆变器。
20、一种示例中,装置还包括:与逆变器输出端连接的坐标变换模块,坐标变换模块的第一输出端与复矢量控制器的第二输入端连接;
21、坐标变换模块包括克拉克clark变换模块和派克park变换模块,clark变换模块的输入端与逆变器的第一输出端连接,clark变换模块的输出端与park变换模块的输入端连接,park变换模块的输出端与复矢量控制器的第二输入端连接;
22、clark变换模块,用于将三相静止坐标系转换为两相静止坐标系;
23、park变换模块,用于将两相静止坐标系转换为两相旋转坐标系;
24、坐标变换模块,用于接收逆变器输出的a相和b相电流反馈值,输出直轴电流反馈值和交轴电流反馈值。
25、一种示例中,装置还包括:与坐标变换模块第二输出端连接的转矩计算模块,转矩计算模块的输出端与振荡抑制模块的第一输入端连接;
26、转矩计算模块,用于接收坐标变换模块输出的直轴电流反馈值和交轴电流反馈值,根据直轴电流反馈值和交轴电流反馈值计算转矩,输出转矩指令。
27、一种示例中,装置还包括:与牵引电机输出端连接的位置传感器,牵引电机的输入端与逆变器的第二输出端连接;
28、位置传感器,用于检测牵引电机的速度。
29、一种示例中,装置还包括:与位置传感器输出端连接的空转滑行控制器,空转滑行控制器的输出端与振荡抑制模块的第二输入端连接;
30、空转滑行控制器,用于接收位置传感器输出的牵引电机的速度,并根据牵引电机的速度计算转矩消减量,转矩消减量用于调整转矩指令。
31、一种示例中,装置还包括:与复矢量控制器输出端连接的脉宽调制模块pwm;
32、pwm,用于接收抑制后的直流侧电压值,根据抑制后的直流侧电压值计算得到三相门极信号,三相门极信号用于控制逆变器。
33、本申请提供的牵引系统电压振荡抑制方法和装置,通过获取直流侧电压振荡信号,确定第一交轴电流指令值,根据预设振荡抑制策略,调整第一交轴电流指令值,得到第二交轴电流指令值,从而根据第二交轴电流指令值,确定抑制后的直流侧电压值。这一电压震荡抑制方法改善了振荡抑制效果,缩短了振荡抑制时间。
技术特征:
1.一种牵引系统电压振荡抑制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据预设振荡抑制策略,调整所述第一交轴电流指令值,得到第二交轴电流指令值,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述电压振荡信号,确定第一交轴电流指令值之后,还包括:
4.根据权利要求2所述的方法,其特征在于,所述根据预设振荡抑制策略,确定振荡抑制系数,包括:
5.一种牵引系统电压振荡抑制装置,其特征在于,所述装置包括:振荡抑制模块和复矢量控制器,所述振荡抑制模块的输出端与所述复矢量控制器的第一输入端连接;
6.根据权利要求5所述的装置,其特征在于,所述装置还包括:与所述逆变器输出端连接的坐标变换模块,所述坐标变换模块的第一输出端与所述复矢量控制器的第二输入端连接;
7.根据权利要求6所述的装置,其特征在于,所述装置还包括:与所述坐标变换模块第二输出端连接的转矩计算模块,所述转矩计算模块的输出端与所述振荡抑制模块的第一输入端连接;
8.根据权利要求5所述的装置,其特征在于,所述装置还包括:与牵引电机输出端连接的位置传感器,所述牵引电机的输入端与所述逆变器的第二输出端连接;
9.根据权利要求8所述的装置,其特征在于,所述装置还包括:与所述位置传感器输出端连接的空转滑行控制器,所述空转滑行控制器的输出端与所述振荡抑制模块的第二输入端连接;
10.根据权利要求5所述的装置,其特征在于,所述装置还包括:与所述复矢量控制器输出端连接的脉宽调制模块pwm;
技术总结
本申请提供一种牵引系统电压振荡抑制方法和装置。该方法包括:接收牵引系统直流侧电压振荡信号;根据电压振荡信号,确定第一交轴电流指令值;根据预设振荡抑制策略,调整第一交轴电流指令值,得到第二交轴电流指令值;根据第二交轴电流指令值,确定抑制后的直流侧电压值。本申请的方法,缩短了振荡抑制时间,改善了振荡抑制效果。
技术研发人员:岳学磊,王雷,高闯,田地,许克磊
受保护的技术使用者:西安中车永电捷通电气有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!