一种水下推进器配置的电机控制方法及系统
本发明属于船舶推进器领域,具体涉及一种水下推进器电机控制方法及系统。
背景技术:
1、近年来,随着高新船舶技术的不断成熟和发展,电动力船配置的水下推进器也越来越受到关注。传统的水下推进器配置控制方法通常采用固定的控制策略或者经验规则,无法适应不同的水下工作环境和任务需求。此外,水下环境的复杂性和不确定性使得精确的推进器配置控制变得更加困难。因此,需要一种更灵活和智能的控制方法。
技术实现思路
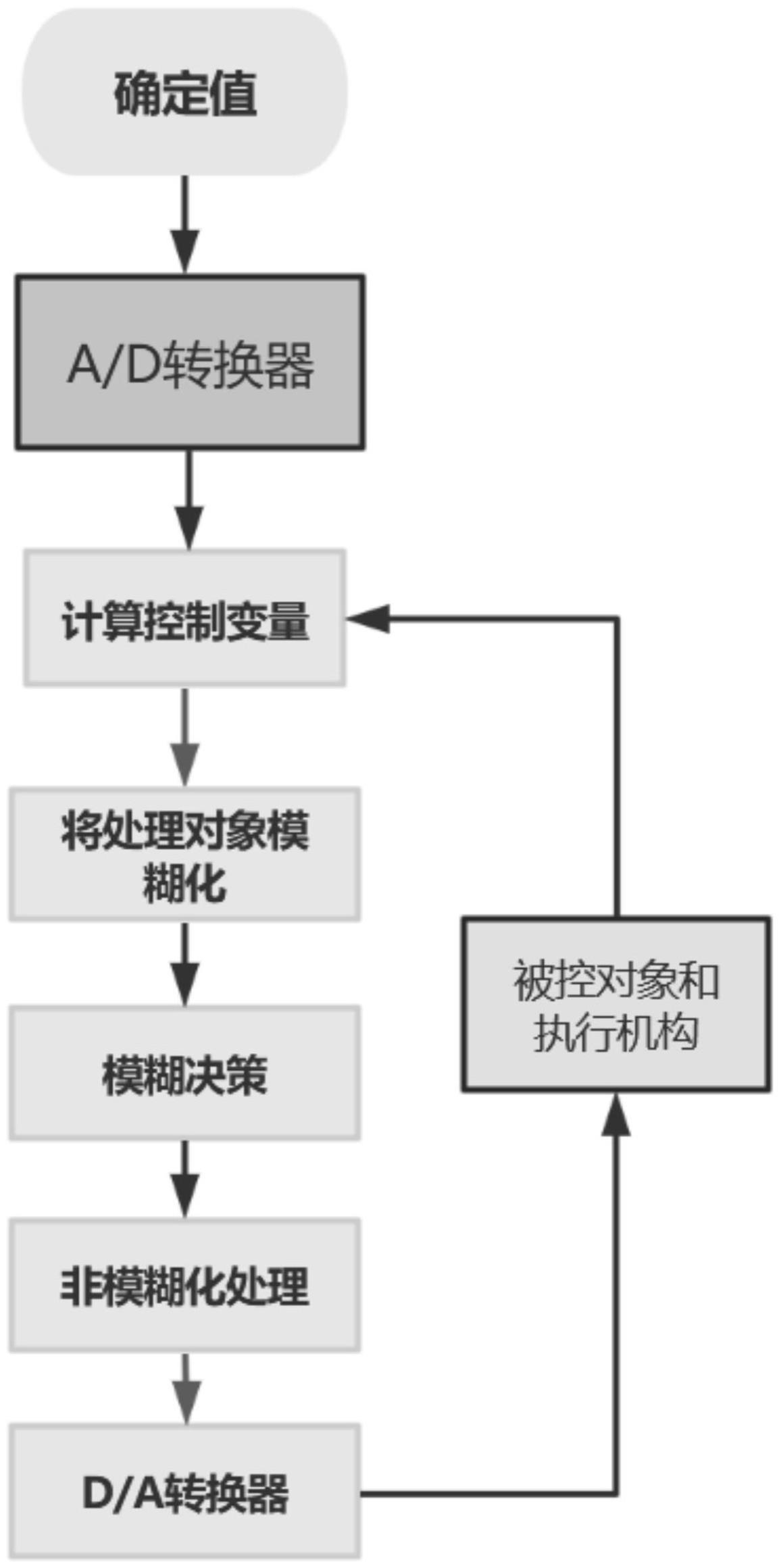
1、本发明提供了一种使用模糊控制法控制水下推进器配置的电机的方法和系统。该系统包括传感器、模糊控制器和执行器。传感器用于实时获取水下环境参数和推进器配置信息,并将其传输给模糊控制器。模糊控制器基于预先定义的模糊规则和模糊推理机制,将传感器反馈的信息转化为推进器配置的模糊控制信号。执行器根据模糊控制信号,调整推进器的参数,例如推力、转速或叶片角度,以实现精确的推进器配置控制。
2、本发明提供的技术方案的有益效果是:
3、模糊控制器能够根据实时的环境参数和任务需求,根据模糊规则自适应地调整推进器的配置。通过模糊化和解模糊化的处理,该方法能够有效地应对水下环境的不确定性和复杂性,实现推进器配置的精确控制。
技术特征:
1.一种水下推进器配置的电机控制方法及系统,其特征在于,所述方法包括:
2.根据权利要求1所述的一种水下推进器配置电机控制方法,其特征在于,根据不同的水下环境条件和工作要求,动态调整模糊规则的权重和模糊集的形状,以优化电机控制的性能,具体为:
技术总结
本发明旨在设计一种基于模糊控制法的水下推进器配置电机控制方法及系统,实现水下航行器或潜水器中的推进器电机的精确控制。该系统采用模糊控制算法结合传感器反馈,通过对水下推进器电机的控制信号进行模糊化和解模糊化处理,实现了对水下推进器配置的精确和灵活控制。通过本发明实现了在复杂水下环境下的推进器配置电机的稳定、高效和自适应控制,该方法可以根据实际环境和任务需求,自动调整推进器配置,提高水下航行器的机动性和性能提升了水下操作的性能和安全性。
技术研发人员:姚熙原,肖迁,张子健
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1