一种无轴承开关磁阻电机的抗扰直接位移控制方法
本发明涉及无轴承开关磁阻电机控制,适用于磁悬浮系统高速转子的平衡控制,属于高速及超高速电气传动领域。
背景技术:
1、无轴承开关磁阻电机在传统开关磁阻电机结构简单,容错性能强的基础上,增加了转子径向悬浮功能,实现了无接触、无磨损、高速和长寿命的特性,解决了使用传统机械轴承导致的磨损加剧、电机发热等问题,在航空航天与透平机械等领域有较好的应用前景。
2、但现有的无轴承开关磁阻电机悬浮控制技术,依赖于电机悬浮力解析模型,需要增加查表空间,控制算法复杂,电机运行过程中参数摄动会降低解析模型的精度。
技术实现思路
1、本发明的目的在于克服现有无轴承开关磁阻电机控制技术缺陷,提供了一种无轴承开关磁阻电机的抗扰直接位移控制方法,使得悬浮位移响应匀速,鲁棒能力更强。
2、为了实现以上目的及其他目的,本发明是通过以下技术方案实现:
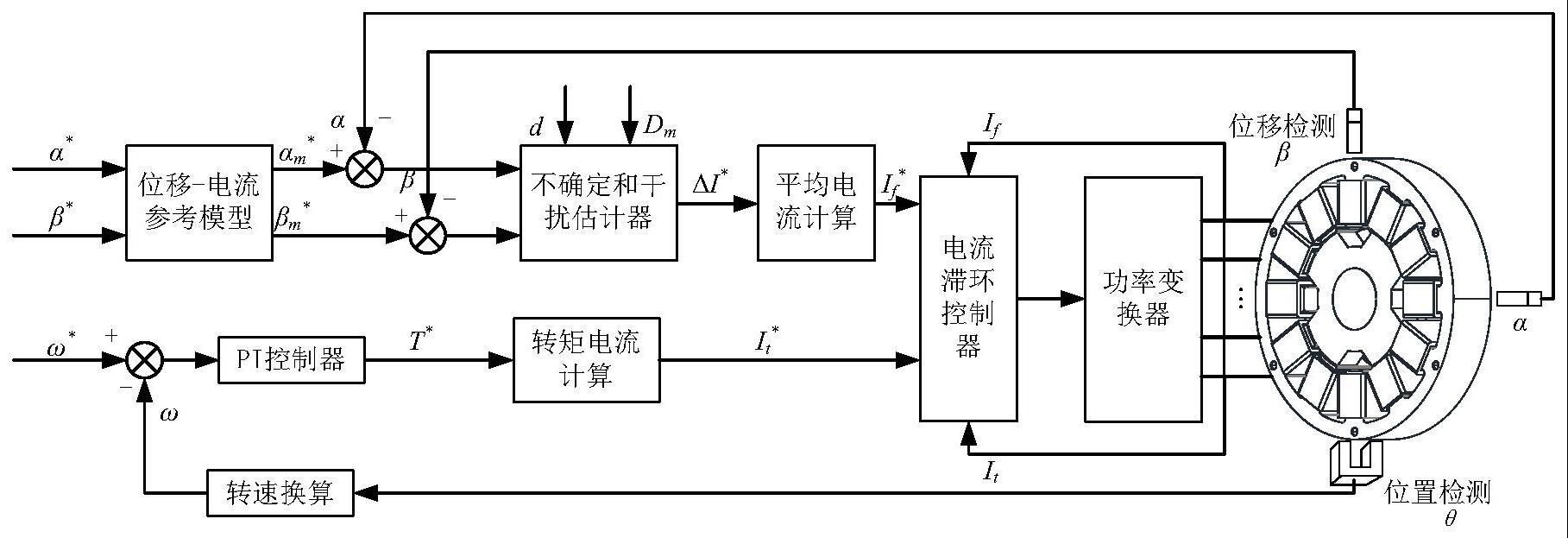
3、一种无轴承开关磁阻电机的抗扰直接位移控制方法,包括,结合给定位移α*、β*,经过位移-电流参考模型,获得系统期望位移响应αm*、βm*。通过位移检测获得电机转子的实际径向位移α、β,分别与系统期望位移响应αm*、βm*作差后,考虑系统模型的不确定度dm和未知干扰d,经过不确定和干扰估计器,得到参考悬浮控制电流δi*,经过平均电流计算,得到各齿极上绕组内所需通入的参考悬浮电流if*,与实际悬浮电流if进行比较,经电流滞环控制器获得各功率管的开关状态,实现电机的悬浮控制。
4、进一步地,当无轴承开关磁阻电机的每相绕组工作在悬浮区间时,计算定子齿极面积ar与该齿极绕组通电后的径向气隙磁通br,获取每相绕组开通时的α轴的径向悬浮力fα和β轴的径向悬浮力fβ的计算公式,其中,a1、a2、a3、a4齿极形成的磁拉力fra1、fra2、fra3、fra4表示为:
5、
6、则α轴和β轴的径向悬浮力fα和fβ的计算公式为:
7、
8、其中,θs表示定子齿极的角度,ds表示定子内径,μ0表示定转子间的气隙,h表示定子叠厚,n表示各定子齿极上绕组匝数,δ表示平均气隙长度,ia1、ia2、ia3、ia4表示a1、a2、a3、a4齿极绕组电流,bra1、bra2、bra3、bra4分别表示a1、a2、a3、a4齿极绕组通电后的径向气隙磁通br。
9、进一步地,将悬浮导通区间每相绕组内的电流分解为偏置电流和控制电流δi,将径向悬浮力fα和fβ的计算公式泰勒展开,进行线性化处理:
10、
11、其中,iα、iβ是α、β方向的等效电流,δiα、δiβ是α、β方向的等效控制电流,δ0为气隙中心位置;kfr为径向刚度系数;
12、将上式中α、β方向的等效控制电流δiα、δiβ和实际径向位移α、β以零值代入,获得位移-控制电流模型为:
13、
14、其中,m为转子质量,kri为径向悬浮力电流刚度,krs为径向悬浮力位移刚度。
15、进一步地,将控制电流δi视作控制输入u(t),实际径向位移α、β视作状态量x(t),电机的状态方程可表示为:
16、
17、其中,a=krs,b=kri,dpα是α方向的悬浮力模型的模型不确定度,dpβ是β方向的悬浮力模型的模型不确定度,dα是α方向的未知扰动,dβ是β方向的未知扰动,mg为重力,根据该状态方程设计对应的参考模型为:
18、
19、其中,xm为系统参考状态,x*为系统状态输入指令,ζm为参考模型的阻尼比,ωm为参考模型的自然频率,使得系统状态x(t)跟踪参考模型状态xm(t)以获得理想状态响应。
20、进一步地,考虑不确定度dm和未知干扰d,设计对应滤波器gf(t)的估计集总干扰为:
21、
22、将估计集总干扰代入模型,转换提取控制输入u(t)的表达式为:
23、
24、其中,u(t)即参考悬浮控制电流δi*,e为系统参考状态跟踪误差,k、λ为误差增益调节系数,k>0,λ>0。
25、在一具体实施例中,平均电流计算包括,以a相为例,偏置电流和参考悬浮控制电流δi*表示如下:
26、
27、其中,为参考悬浮控制电流δi*在α、β方向上的分量,参考悬浮电流包括各相齿极绕组内的参考悬浮电流根据上式可以求出各相齿极绕组内的参考悬浮电流再与采样得到的各相齿极绕组内的实际悬浮电流比较,经电流滞环控制器获得各功率管的开关状态,实现电机的悬浮控制。
28、在一具体实施例中,所述电流滞环控制器包括,设置电流跟踪带宽,在参考电流与实际电流的差值大于滞环带宽上限时,代表实际电流远小于参考电流,输出状态“1”,以导通该相进行励磁,提升实际电流;反之,则输出状态“0”,断开该相励磁,降低实际电流,使实际电流跟踪参考电流。
29、上述一种无轴承开关磁阻电机的抗扰直接位移控制方法,还包括对电机进行转矩控制,通过位置检测转角θ,将其换算为电机实际转速ω,与给定转速ω*比较作差后,通过pi控制器获得参考转矩t*,代入转矩电流计算模型后,获得参考转矩电流it*,与实际转矩电流it进行比较,经电流滞环控制器获得各功率管的开关状态,实现电机的转矩控制。
30、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
31、(1)本发明无需电机悬浮力解析模型,使得悬浮位移控制系统响应迅速,不易受运行过程中电机参数变化的干扰;
32、(2)本发明引入位移刚度和电流刚度系数,使得电机悬浮控制获得与磁轴承悬浮控制类似的性能,无需力的解算环节,简化了控制算法与调参过程;
33、(3)本发明针对位移-控制电流的二阶系统,引入了不确定和干扰估计器,提升了系统在应对各类干扰下的位移跟踪精度和鲁棒能力。
技术特征:
1.一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,包括,结合给定位移α*、β*,经过位移-电流参考模型,获得系统期望位移响应αm*、βm*,通过位移检测获得电机转子的实际径向位移α、β,分别与系统期望位移响应αm*、βm*作差后,考虑系统模型的不确定度dm和未知干扰d,经过不确定和干扰估计器,得到参考悬浮控制电流δi*,经过平均电流计算,得到各齿极上绕组内所需通入的参考悬浮电流与实际悬浮电流if进行比较,经电流滞环控制器获得各功率管的开关状态,实现电机的悬浮控制。
2.根据权利要求1所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,
3.根据权利要求2所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,
4.根据权利要求3所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,
5.根据权利要求4所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,考虑不确定度dm和未知干扰d,设计对应滤波器gf(t)的估计集总干扰为:
6.根据权利要求1所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,平均电流计算包括,以a相为例,偏置电流和参考悬浮控制电流δi*表示如下:
7.根据权利要求1所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,所述电流滞环控制器包括,设置电流跟踪带宽,在参考电流与实际电流的差值大于滞环带宽上限时,代表实际电流远小于参考电流,输出状态“1”,以导通该相进行励磁,提升实际电流;反之,则输出状态“0”,断开该相励磁,降低实际电流,使实际电流跟踪参考电流。
8.根据权利要求1所述一种无轴承开关磁阻电机的抗扰直接位移控制方法,其特征在于,还包括对电机进行转矩控制,通过位置检测转角θ,将其换算为电机实际转速ω,与给定转速ω*比较作差后,通过pi控制器获得参考转矩t*,代入转矩电流计算模型后,获得参考转矩电流it*,与实际转矩电流it进行比较,经电流滞环控制器获得各功率管的开关状态,实现电机的转矩控制。
技术总结
本发明提供了一种无轴承开关磁阻电机的抗扰直接位移控制方法,包括结合给定位移α<supgt;*</supgt;、β<supgt;*</supgt;,经过位移‑电流参考模型,获得系统期望位移响应α<subgt;m</subgt;<supgt;*</supgt;、β<subgt;m</subgt;<supgt;*</supgt;。通过位移检测获得电机转子的实际径向位移α、β,分别与系统期望位移响应α<subgt;m</subgt;<supgt;*</supgt;、β<subgt;m</subgt;<supgt;*</supgt;作差后,考虑系统模型的不确定度D<subgt;m</subgt;和未知干扰d,经过不确定和干扰估计器,得到参考悬浮控制电流ΔI<supgt;*</supgt;,经过平均电流计算,得到各齿极上绕组内所需通入的参考悬浮电流I<subgt;f</subgt;<supgt;*</supgt;,与实际悬浮电流I<subgt;f</subgt;进行比较,经电流滞环控制器获得各功率管的开关状态,实现电机的悬浮控制。本发明使得无轴承开关磁阻电机获得了磁轴承的控制效果,无需电机悬浮力解算模型,简化了控制算法,提升了系统抗扰效果。
技术研发人员:崔强,曹鑫,钱梦飞,邓智泉
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!