一种基于三相四桥臂逆变器的双凸极磁阻电机容错控制方法
本发明基于双凸极磁阻电机控制领域,特别涉及了一种基于三相四桥臂逆变器的双凸极磁阻电机容错控制方法。
背景技术:
1、相比于传统的感应电机和永磁同步电机,双凸极磁阻电机有着结构简单可靠,调速范围广,成本低等优点。由于控制电路中元器件的长久使用会出现老化的问题,电机就会因器件发生故障出现电机失控的现象。双凸极磁阻电机控制系统中最容易出现故障的就是逆变器拓扑当中的功率开关器件,功率开关器件发生故障时,会出现母线电流过大、缺相、开关顺序紊乱、电流发生畸变等现象,这会对电机控制系统造成破环。
2、近年来,电机的容错控制受到了越来越多的关注,当电机逆变器的某个功率开关器件或某一个桥臂发生开路故障时,会使电机输出效率大大降低,可能会导致电机相电流失衡,甚至损坏电机。对于电机的逆变器拓扑,三相四桥臂逆变器拓扑具有开关器件少、控制灵活的优点,因此,在基于三相四桥臂逆变器拓扑上实现双凸极磁阻电机的容错控制是非常必要的。
技术实现思路
1、本发明研究的目的是在于解决双凸极磁阻电机在逆变器出现单个开关器件或者单个桥臂发生开路时,基于逆变器拓扑和电机控制相互配合作用下,实现开路故障时的容错控制,保证电机在开路故障时能实现平稳过渡,确保电机的正常运行。
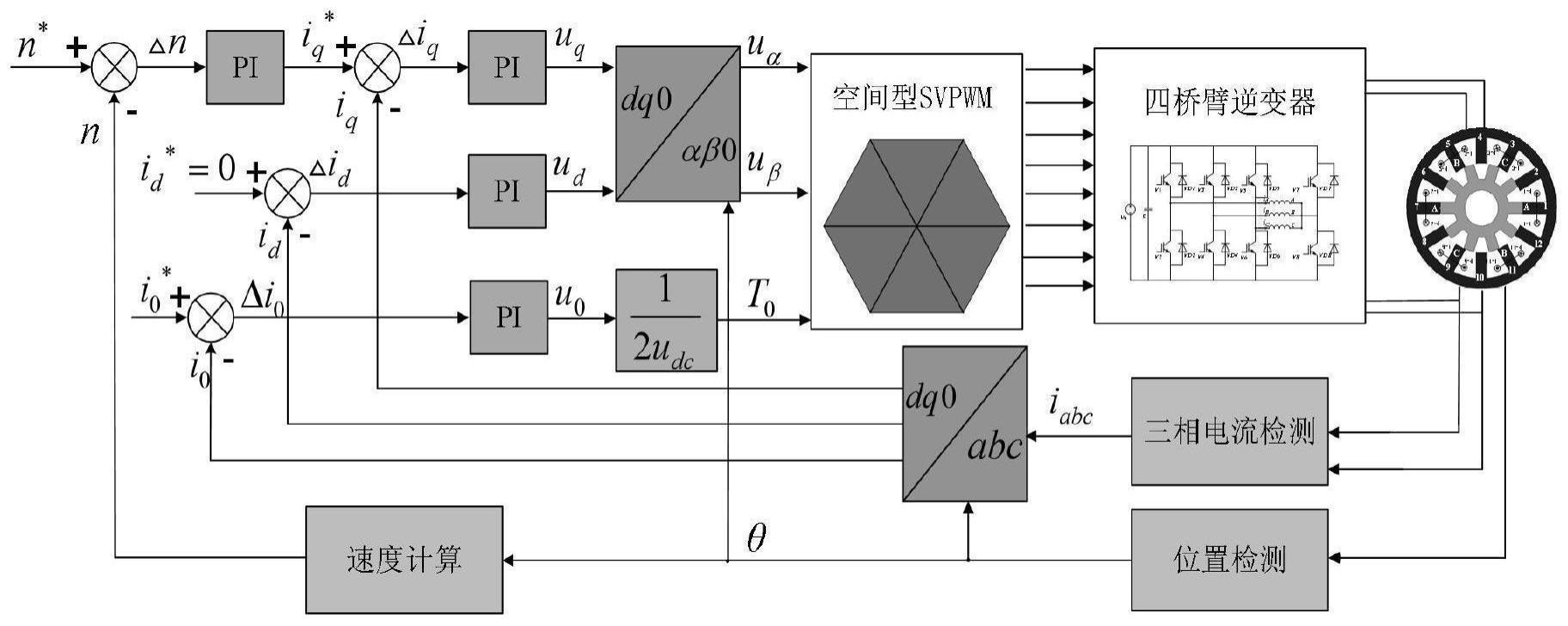
2、本发明的技术方案如下:首先提出了一种双凸极磁阻电机发生开路故障时的容错控制方法,其中控制系统主要由双凸极磁阻电机、直流电源和四桥臂逆变器构成。对于双凸极磁阻电机,三相四桥臂逆变器拓扑在不改变硬件的前提下,可实现带直流偏置的矢量控制、正极性电流斩波控制、负极性电流斩波控制和传统的矢量控制。
3、1、在电机正常运行下,四桥臂逆变器当中第一桥臂、第二桥臂、第三桥臂、第四桥臂都参与电机的控制,不同于传统的三桥臂两电平逆变器电压矢量状态只有8种,其开关状态矢量的选取和作用时间的计算较为简单,而对于四桥臂两电平逆变器,由于增加了一个桥臂,电压状态基本矢量有16种,这16个空间矢量在αβγ坐标系下构成了一个六棱柱,该六棱柱由6个三棱柱构成,每个三棱柱又可分为4个四面体,由此实现空间矢量脉宽调制(svpwm)。在此控制模式下三相电流中包含有正弦交流分量和直流偏置分量。
4、2、当前三个桥臂下开关管发生开路故障时,可将控制方式切换为正极性电流斩波控制。在此控制模式下,只需要前三个桥臂的上开关管和第四个桥臂的下开关管参与工作,其它开关管保持断开状态。
5、3、当前三个桥臂上开关管发生开路故障时,可将控制方式切换为负极性电流斩波控制。在此控制模式下,只需要前三个桥臂的下开关管和第四个桥臂的上开关管参与工作,其它开关管保持断开状态。
6、4、当第四个桥臂某个开关管发生开路或整个桥臂发生开路时,可将控制模式切换为传统的矢量控制。在该控制模式下可以通过坐标变换、电流和转速的闭环控制等过程对电流进行精确的调控,由于第四个桥臂不参与电机控制,逆变器无法提供零序电流所需的零序通道,因此该控制模式下三相电流中不存在直流偏置分量。
7、有益效果:
8、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
9、本发明提出了一种在线切换不同控制模式下的双凸极磁阻电机的控制,主要可以应用于双凸极磁阻电机的容错控制。具体表现为当该电机的四桥臂逆变器发生开关器件的开路故障时,可以通过软件在线实现不同模式的平滑切换,这样可以确保电机发生开路故障时能正常运行,避免电机失控。而双凸极磁阻电机多应用于航空航天、电动汽车等重要场合,本发明提高该电机在这些场合的可靠性,对于双凸极磁阻电机应对于不同场合的稳定运行有着重要意义。
技术特征:
1.一种基于三相四桥臂逆变器的双凸极磁阻电机容错控制方法,针对双凸极磁阻电机,通过三相四桥臂逆变器控制系统实现一种容错控制方法。其中三相四桥臂逆变器拓扑包括四个桥臂,每个桥臂有两个功率开关和两个续流二极管,分别为v1~v8和vd1~vd8,而电机绕组包括a、b、c三相,并采用星形连接方式,在其中性点处连接第四个桥臂。该控制系统控制灵活,能通过开关器件的开通与关断实现不同的控制模式,这就可以应对逆变器中开关器件发生开路时通过模式切换来保障电机的正常运行。
2.根据权利要求1所述的三相四桥臂逆变器容错控制,其特征在于,当电机正常运行时,采用带直流偏置的矢量控制模式,此时逆变器四个桥臂都参与电机的控制,前三个桥臂采用星形连接的方式,将第四个桥臂接到中性点上,为零序电流提供了所需的零序通道,实现对电机的有效控制。
3.根据权利要求1所述的三相四桥臂逆变器容错控制,其特征在于,当逆变器中前三个桥臂下开关管任意数量的igbt发生开路故障时,可将控制模式切换为正极性电流斩波控制,即利用前三个桥臂的上开关管v1、v3、v5和第四个桥臂的下开关管v8以及各自的续流二极管可实现正极性电流斩波控制。
4.根据权利要求1所述的三相四桥臂逆变器容错控制,其特征在于,当逆变器中前三个桥臂上开关管任意数量的igbt发生开路故障时,可将控制模式切换为负极性电流斩波控制,即利用前三个桥臂的下开关管v2、v4、v6和第四个桥臂的上开关管v7以及各自的续流二极管可实现负极性电流斩波控制。
5.根据权利要求1所述的三相四桥臂逆变器容错控制,其特征在于,当逆变器第四个桥臂开关器件v7、v8发生开路故障时,由于电机控制的零序电流所需的通道被破坏,此时可用前三个桥臂实现传统的矢量控制,在该控制模式下,电机的三相电流经过坐标变换为交轴电流和直轴电流,交轴电流用于产生有效的电磁转矩,直轴电流用于产生所需的励磁磁场,并通过pi控制器对其进行精确的调控,可在逆变器第四桥臂发生开路故障时保证电机的正常运行。
技术总结
本发明公开了一种基于三相四桥臂逆变器的双凸极磁阻电机容错控制方法,主要涉及了双凸极磁阻电机控制领域,该方法可实现逆变器开关发生开路故障时的容错控制。控制系统主要包括双凸极磁阻电机、逆变器、直流电源和传感器。其中逆变器采用的三相四桥臂逆变器拓扑,该拓扑结构相较于开绕组逆变器拓扑所需开关器件更少,减小了开关损耗,降低了成本。而四桥臂逆变器功率开关在长久使用或者特殊场合使用情况下易发生开路故障,导致输出效率大大降低,甚至对电机造成损害。为了应对这种情况,本发明提出的容错控制方法可应对在功率开关器件发生开路故障时,在线切换电机的控制模式,实现带直流偏置的矢量控制、正极性电流斩波控制、负极性电流斩波控制和传统的矢量控制四种控制模式的切换,使逆变器发生开路故障时保持电机平稳运行。本发明提高了双凸极磁阻电机在航空航天、汽车等重要场合下的可靠性。
技术研发人员:程鹤,周建平,胡钦
受保护的技术使用者:中国矿业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!