一种内置行星减速器的机器人关节电机的制作方法
本发明属于机器人关节电机,具体涉及一种内置行星减速器的机器人关节电机。
背景技术:
1、现今机器人关节电机要求质量轻,能力密度大,抗冲击性能好,力矩大,体积小,低速性能稳定,常规的工业用电机由于较少考虑上述条件无法直接应用在机器人关节。工业机械臂上常用的谐波减速器由于其体积大,重量大,抗冲击性能差,疲劳寿命较短,加工工艺复杂,不适于应用在足式机器人上。所以我们需要一款新型的内置行星减速器的机器人关节电机来解决上述问题,满足人们的需求。
技术实现思路
1、本发明的目的在于提供一种内置行星减速器的机器人关节电机,以解决其抗冲击性能差,疲劳寿命较短的问题。
2、为实现上述目的,本发明提供如下技术方案:一种内置行星减速器的机器人关节电机,包括
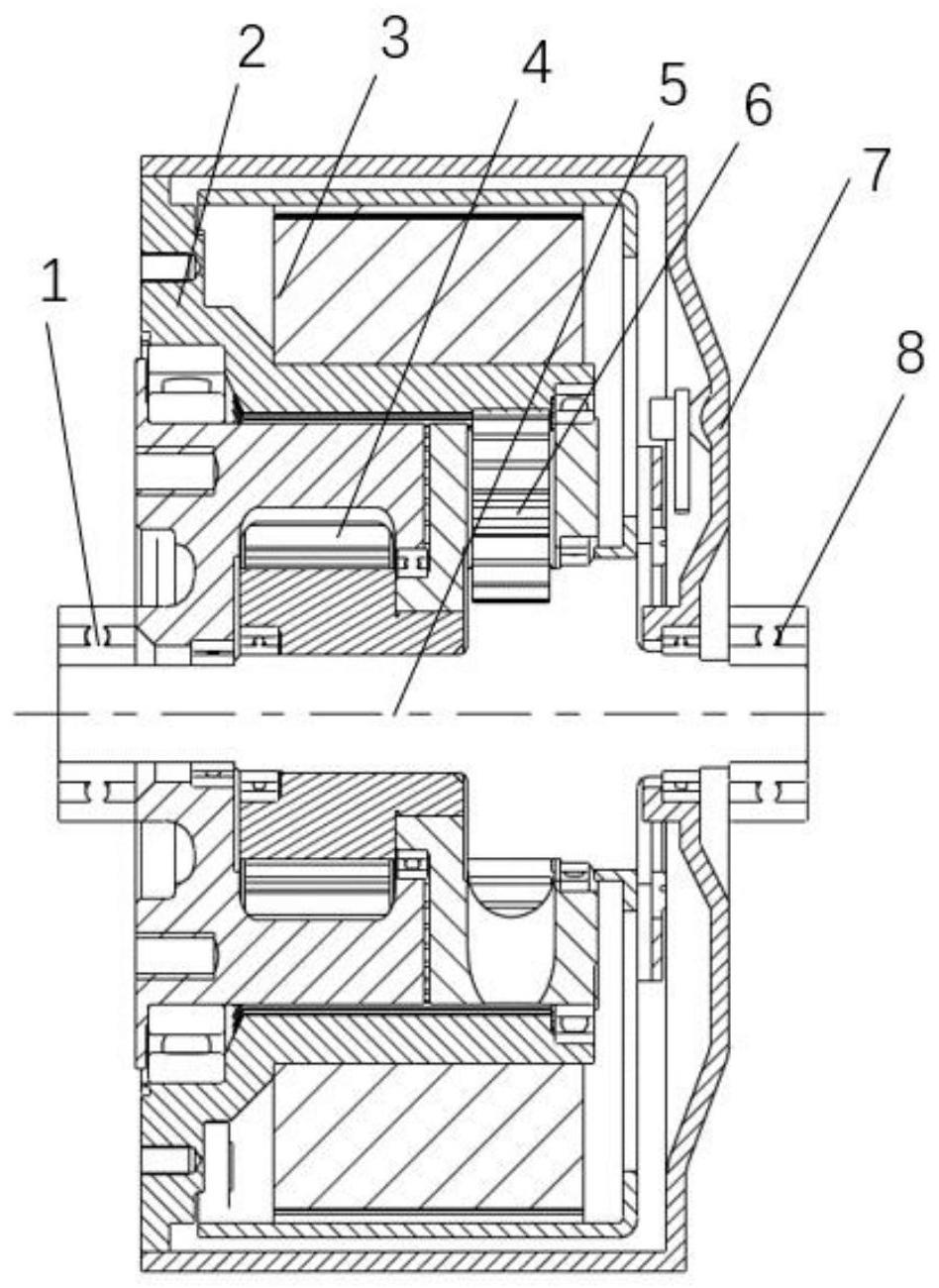
3、外壳,所述外壳右侧设有二号轴承,所述外壳内侧设有外转子,所述外转子中心设有中心轴,所述中心轴外围设有行星减速器,所述行星减速器外侧设有定子铁芯,所述定子铁芯前侧设有内齿轮支架,所述内齿轮支架中心内侧设有一号轴承。
4、优选的,所述二号轴承和一号轴承分别固定在中心轴的两端作为负载的支撑端。
5、优选的,所述内齿轮支架与外壳固定连接形成电机的固定基座。
6、优选的,所述内齿轮支架与定子铁芯固定安装。
7、优选的,所述行星减速器两端外圈通过内齿轮支架支撑和内圈通过中心轴定位支撑。
8、优选的,所述中心轴两端分别与行星减速器、外壳配合定位。
9、本发明的技术效果和优点:该种内置行星减速器的机器人关节电机的内齿轮支架即作为传动件又作为结构支撑件还起到固定定子铁芯的作用,有效减小电机的体积,结构紧凑,传动平稳,功率密度高,重量轻。同时,行星减速器受力均匀,加工工艺成熟,疲劳寿命长,抗冲击性能好,对提高关节电机的性能起到明显的作用。
技术特征:
1.一种内置行星减速器的机器人关节电机,其特征在于:包括
2.根据权利要求1所述的一种内置行星减速器的机器人关节电机,其特征在于:所述二号轴承(8)和一号轴承(1)分别固定在中心轴(5)的两端作为负载的支撑端。
3.根据权利要求1所述的一种内置行星减速器的机器人关节电机,其特征在于:所述内齿轮支架(2)与外壳(7)固定连接形成电机的固定基座。
4.根据权利要求1所述的一种内置行星减速器的机器人关节电机,其特征在于:所述内齿轮支架(2)与定子铁芯(3)固定安装。
5.根据权利要求1所述的一种内置行星减速器的机器人关节电机,其特征在于:所述行星减速器(4)两端外圈通过内齿轮支架(2)支撑和内圈通过中心轴(5)定位支撑。
6.根据权利要求1所述的一种内置行星减速器的机器人关节电机,其特征在于:所述中心轴(5)两端分别与行星减速器(4)、外壳(7)配合定位。
技术总结
本发明公开了一种内置行星减速器的机器人关节电机,包括外壳,外壳右侧设有二号轴承,外壳内侧设有外转子,外转子中心设有中心轴,中心轴外围设有行星减速器,行星减速器外侧设有定子铁芯,定子铁芯前侧设有内齿轮支架,内齿轮支架中心内侧设有一号轴承。该种内置行星减速器的机器人关节电机的内齿轮支架即作为传动件又作为结构支撑件还起到固定定子铁芯的作用,有效减小电机的体积,结构紧凑,传动平稳,功率密度高,重量轻。同时,行星减速器受力均匀,加工工艺成熟,疲劳寿命长,抗冲击性能好,对提高关节电机的性能起到明显的作用<subgt;。</subgt;
技术研发人员:毛惟谦,田原
受保护的技术使用者:上海哲谦应用科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!