一种新能源汽车电机相电流采样延迟标定补偿方法及系统与流程
本发明属于新能源汽车领域,尤其涉及一种新能源汽车电机相电流采样延迟标定补偿方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、新能源汽车行驶是以驱动电机为动力源,通过给电机控制器发送扭矩指令,电机控制器响应扭矩指令并驱动车辆行驶。电机控制器控制电机输出扭矩过程是:通过采集电机相电流,相电流经过park、clarke换算成dq轴电流与目标电流比较,比较值经pi运算、iparke和iclarke变换及svpwm处理后生产交流控制电压vabc,控制电机输出目标扭矩值。
3、由以上控制过程可知,电流采样的精度对扭矩控制非常重要,因为电流采样处理过程有延迟,例如电流传感器、采样处理电路及ad转换过程等延迟,另外电机转子位置检测一般采用旋转变压器,旋转变压器因为机械装配原因会存在零位偏差问题,结合采样延迟未做补偿或者补偿不准时,会带来扭矩误差大,损耗加大,甚至引起扭矩振荡、抖动等问题。
4、现有技术没有考虑电机转动惯量、摩擦等空载扭矩,直接采用零扭矩标定电流采样延迟和电机零位,这样会因电流延迟采样,导致控制不准。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种新能源汽车电机相电流采样延迟标定补偿方法及系统,其可以避免因电流延迟采样,导致控制不准的问题,兼顾电机整个转速范围,提升电驱系统扭矩控制精度和效率,提高整车舒适性和经济性。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种新能源汽车电机相电流标定补偿方法。
4、一种新能源汽车电机相电流标定补偿方法,包括:
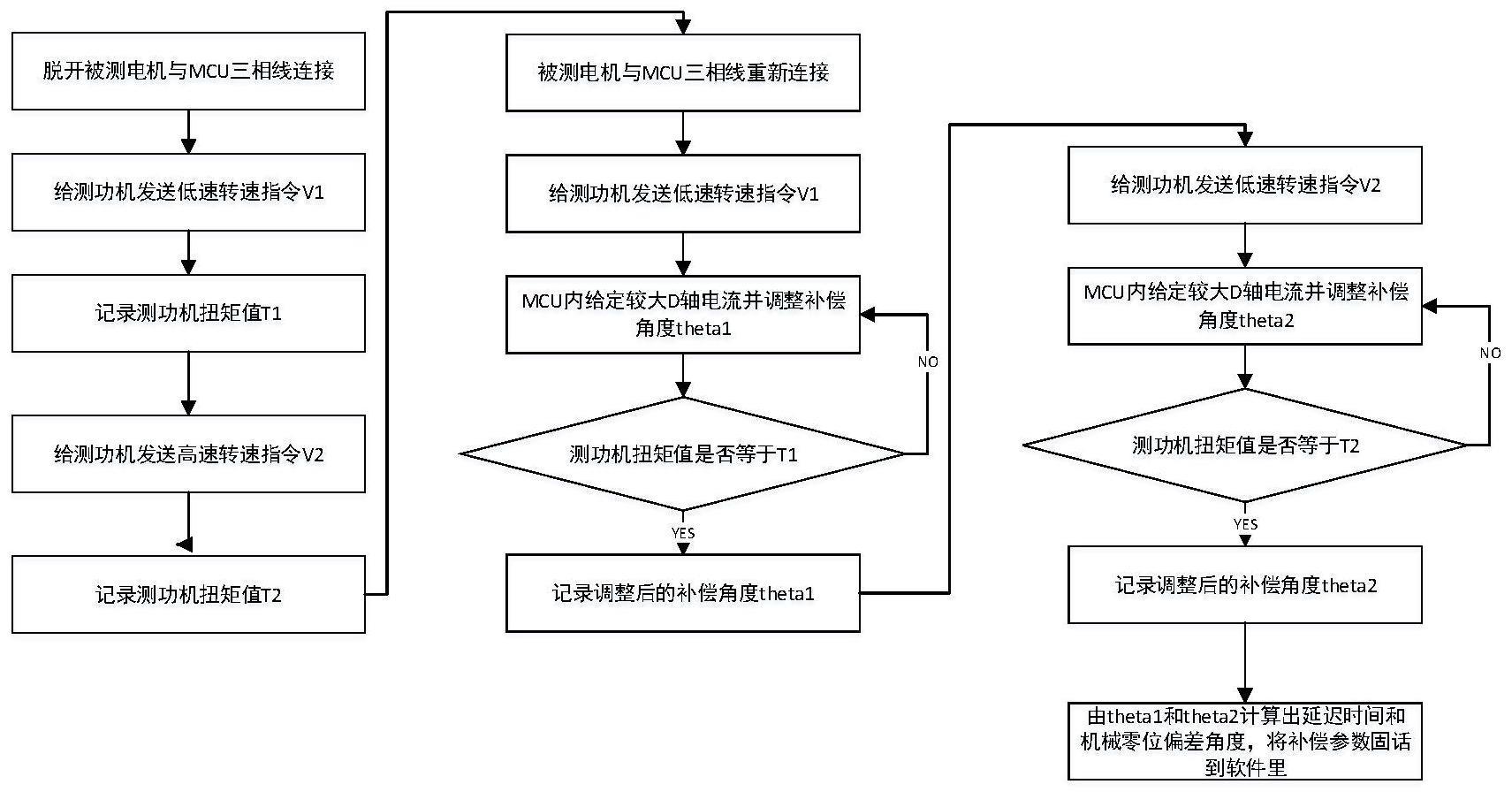
5、在电机转速范围内的两个不同转速下,分别获取测试空载时被测电机输出轴上的空载扭矩值;
6、在电机转速范围内的两个不同转速及给定电流的工况下,将产生的对应扭矩分别与对应转速下的空载扭矩值进行比对;
7、根据比对结果来调整电机位置补偿角度值,直至电机转速范围内的两个不同转速对应的扭矩与对应空载扭矩值相等;
8、根据电机转速范围内的两个不同转速所对应的电机位置补偿角度值,计算出电流采样延迟时间和电机零位机械偏差角度;
9、根据电流采样延迟时间设置采样芯片的采样对应时刻,同时在定时器计数波峰和/或波谷采样电机转子角度值减去电机零位机械偏差角度,得到电机转子位置角度值。
10、作为一种实施方式,所述给定电流为d轴电流,其大小为2/3电机最大相电流值。
11、作为一种实施方式,在电机转速范围内的两个不同转速分别为电机转速范围的两个极限转速。
12、作为一种实施方式,计算电流采样延迟时间和电机零位机械偏差角度的过程为:
13、基于电机电角速度、电流采样延迟时间和电机零位机械偏差角度和电机位置补偿角度值的已知函数关系式,求解得到电流采样延迟时间和电机零位机械偏差角度。
14、作为一种实施方式,所述函数关系式为:
15、电机位置补偿角度值,等于转速对应的电机电角速度与流采样延迟时间相乘后再与电机零位机械偏差角度的累加和。
16、本发明的第二个方面提供了一种新能源汽车电机相电流标定补偿系统。
17、一种新能源汽车电机相电流标定补偿系统,其包括:
18、空载扭矩获取模块,其用于在电机转速范围内的两个不同转速下,分别获取测试空载时被测电机输出轴上的空载扭矩值;
19、扭矩比对模块,其用于在电机转速范围内的两个不同转速及给定电流的工况下,将产生的对应扭矩分别与对应转速下的空载扭矩值进行比对;
20、电机位置补偿角度调整模块,其用于根据比对结果来调整电机位置补偿角度值,直至电机转速范围内的两个不同转速对应的扭矩与对应空载扭矩值相等;
21、补偿参数计算模块,其用于根据电机转速范围内的两个不同转速所对应的电机位置补偿角度值,计算出电流采样延迟时间和电机零位机械偏差角度;
22、采样及转子调整模块,其用于根据电流采样延迟时间设置采样芯片的采样对应时刻,同时在定时器计数波峰和/或波谷采样电机转子角度值减去电机零位机械偏差角度,得到电机转子位置角度值。
23、作为一种实施方式,在所述扭矩比对模块中,所述给定电流为d轴电流,其大小为2/3电机最大相电流值。
24、作为一种实施方式,在所述空载扭矩获取模块中,在电机转速范围内的两个不同转速分别为电机转速范围的两个极限转速。
25、作为一种实施方式,在所述补偿参数计算模块中,计算电流采样延迟时间和电机零位机械偏差角度的过程为:
26、基于电机电角速度、电流采样延迟时间和电机零位机械偏差角度和电机位置补偿角度值的已知函数关系式,求解得到电流采样延迟时间和电机零位机械偏差角度。
27、作为一种实施方式,所述函数关系式为:
28、电机位置补偿角度值,等于转速对应的电机电角速度与流采样延迟时间相乘后再与电机零位机械偏差角度的累加和。
29、本发明的第三个方面提供一种计算机可读存储介质。
30、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述所述的新能源汽车电机相电流标定补偿方法中的步骤。
31、本发明的第四个方面提供一种电子设备。
32、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的新能源汽车电机相电流标定补偿方法中的步骤。
33、与现有技术相比,本发明的有益效果是:
34、本发明的新能源汽车电机相电流标定补偿方法简便且精准,其通过在电机转速范围内的两个不同转速,在给定电流的工况下产生的对应扭矩分别与对应转速下的空载扭矩值进行比对,来调整电机位置补偿角度值,直至电机转速范围内的两个不同转速对应的扭矩与对应空载扭矩值相等,进而计算出电流采样延迟时间和电机零位机械偏差角度;最后根据电流采样延迟时间设置采样芯片的采样对应时刻,同时在定时器计数波峰和/或波谷采样电机转子角度值减去电机零位机械偏差角度,得到电机转子位置角度值;通过标定补偿后可以适应不同转速下扭矩的精确控制,同时也实现对电机机械零位角度误差的标定补偿,实现机械位置角度的精确检测,提升了电驱系统扭矩控制精度,提高了系统效率和寿命,同时也提高了整车的舒适性、经济性和可靠性。
35、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种新能源汽车电机相电流标定补偿方法,其特征在于,包括:
2.如权利要求1所述的新能源汽车电机相电流标定补偿方法,其特征在于,所述给定电流为d轴电流,其大小为2/3电机最大相电流值。
3.如权利要求1所述的新能源汽车电机相电流标定补偿方法,其特征在于,在电机转速范围内的两个不同转速分别为电机转速范围的两个极限转速。
4.如权利要求1所述的新能源汽车电机相电流标定补偿方法,其特征在于,计算电流采样延迟时间和电机零位机械偏差角度的过程为:
5.如权利要求4所述的新能源汽车电机相电流标定补偿方法,其特征在于,所述函数关系式为:
6.一种新能源汽车电机相电流标定补偿系统,其特征在于,包括:
7.如权利要求6所述的新能源汽车电机相电流标定补偿系统,其特征在于,在所述扭矩比对模块中,所述给定电流为d轴电流,其大小为2/3电机最大相电流值;
8.如权利要求6所述的新能源汽车电机相电流标定补偿系统,其特征在于,在所述补偿参数计算模块中,计算电流采样延迟时间和电机零位机械偏差角度的过程为:
9.如权利要求8所述的新能源汽车电机相电流标定补偿系统,其特征在于,所述函数关系式为:
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-5中任一项所述的新能源汽车电机相电流标定补偿方法中的步骤。
技术总结
本发明属于新能源汽车领域,提供了一种新能源汽车电机相电流采样延迟标定补偿方法及系统。其中,该方法包括在电机转速范围内的两个不同转速下,分别获取测试空载时被测电机输出轴上的空载扭矩值;在电机转速范围内的两个不同转速及给定电流的工况下,将产生的对应扭矩分别与对应转速下的空载扭矩值进行比对;根据比对结果来调整电机位置补偿角度值,直至电机转速范围内的两个不同转速对应的扭矩与对应空载扭矩值相等;计算出电流采样延迟时间和电机零位机械偏差角度;根据电流采样延迟时间设置采样芯片的采样对应时刻,同时在定时器计数波峰和/或波谷采样电机转子角度值减去电机零位机械偏差角度,得到电机转子位置角度值。
技术研发人员:杭孟荀,王金桥,凤志民
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!