一种电力检修的爬线式机器人的制作方法
本发明涉及电力检修,具体为一种电力检修的爬线式机器人。
背景技术:
1、电力检修是指对电力设备进行定期维护、检查和修理的过程,其目的是确保设备的正常运行,提高其安全性和可靠性,保障电力系统的稳定运行,进行电力检修工作的人员需要具有较高的专业性,以确保检修工作以及人员自身的安全性。
2、在对架空电缆进行检修工作时,爬线式机器人已经成为解决电力检修的有力工具,这种机器人在工作时是以架设在待检修电缆上方的轨道钢缆为悬挂承载,通过电动或液压系统的驱动,实现对电力设备的巡检、清洗、维修和更换等工作,可以替代人工检修,降低劳动强度和人力成本,提高工作安全性和效率。
3、而现有的电力检修的爬线式机器人,在进行电力检修工作时因其作为悬挂承载的轨道钢缆的安装高度限制,爬线式机器人往往只能对限定高度的电缆进行检修,存在一定的使用局限性,且由于轨道钢缆的架设长度较大,轨道钢缆上会存在较多的连接支撑节点,容易给爬线式机器人的行进造成阻碍,若爬线式机器人选择强行通过很容易出现颠簸晃动而坠落的情况,为此,我们提出一种电力检修的爬线式机器人。
技术实现思路
1、本发明要解决的技术问题是克服现有的缺陷,提供一种电力检修的爬线式机器人,可以自动完成电力检修工作,极大的降低了人员的劳动负担,还能通过改变自身的悬挂高度来满足不同高度位置的电力检修工作,适用范围较广,且能够在保证移动稳定性的前提下自动绕开障碍物,确保电力检修工作的持续开展,可以有效解决背景技术中的问题。
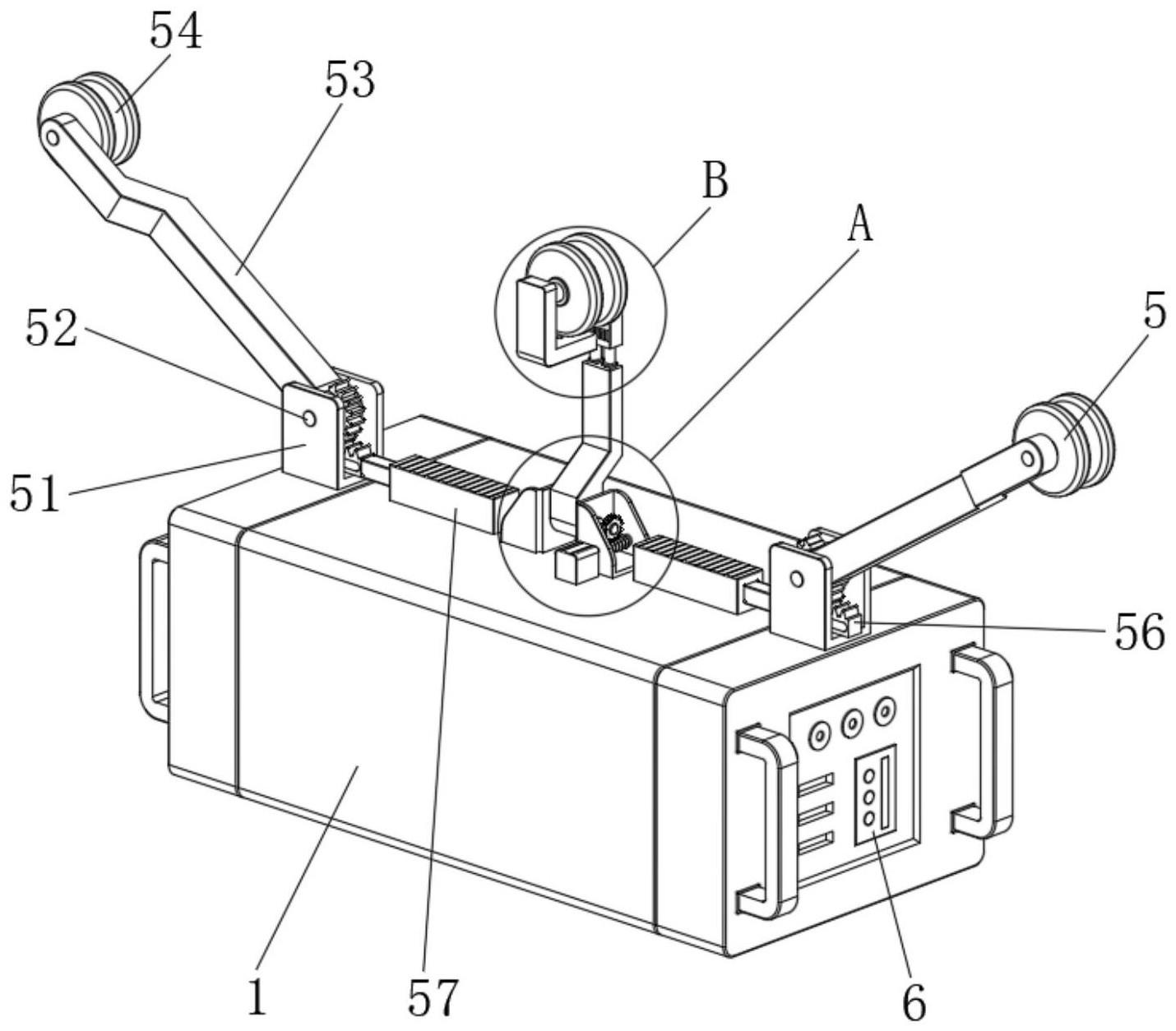
2、为实现上述目的,本发明提供如下技术方案:一种电力检修的爬线式机器人,包括外壳和爬线单元;
3、外壳:其底面中部设有凹槽,凹槽的内部顶壁中心处设有摄像机,凹槽的内部左右两端对称设有检修机械手;
4、爬线单元:包括立座、销柱、第一摆臂和第一导向轮,所述立座对称设置于外壳的上表面左右两端,立座的内部均通过销柱转动连接有第一摆臂,第一摆臂的上端均通过销轴转动连接有第一导向轮;
5、其中:所述外壳的右侧面设有plc控制器,外壳内部右侧设置的电池仓内设有蓄电池,plc控制器的输入端电连接蓄电池的输出端,摄像机的输出端电连接plc控制器的输入端,检修机械手的输入端电连接plc控制器的输出端,可以自动完成电力检修工作,极大的降低了人员的劳动负担,还能通过改变自身的悬挂高度来满足不同高度位置的电力检修工作,适用范围较广,且能够在保证移动稳定性的前提下自动绕开障碍物,确保电力检修工作的持续开展。
6、进一步的,所述爬线单元还包括半齿环、齿条板和第一电动推杆,所述半齿环分别设置于两个第一摆臂的下端弧面上,立座的内部均横向滑动连接有齿条板,外壳的上表面设有左右对称的第一电动推杆,两个第一电动推杆的伸缩端外侧端头分别与同侧相邻的齿条板固定连接,齿条板与竖向对应的半齿环啮合连接,第一电动推杆的输入端电连接plc控制器的输出端,可以带动第一摆臂发生旋转倾斜。
7、进一步的,所述半齿环的圆心均位于纵向对应的销柱的中心轴线上,可以确保后续工作正常开展。
8、进一步的,所述外壳的上表面中部设有左右对称的支座,两个支座之间通过销杆转动连接有第二摆臂,第二摆臂上端左右对称设置的安装槽内均设有第二电动推杆,第二电动推杆的伸缩端上端与衔接板固定连接,衔接板的前侧面上端设有第三电动推杆,第三电动推杆的固定端外弧面活动套设有第二导向轮,第二电动推杆和第三电动推杆的输入端均电连接plc控制器的输出端,可以从中部为该爬线式机器人提供悬挂支撑。
9、进一步的,所述第三电动推杆的伸缩端前端设有箍板,箍板为l形铁质箍板,可以对防止第二导向轮从轨道钢缆上跌落。
10、进一步的,所述衔接板的前侧面下端设有磁铁片,磁铁片与箍板的纵向板体位置对应,可以实现对箍板的强化定位。
11、进一步的,所述箍板的纵向板体后端设有凹腔,凹腔内部底面前后对称设置的竖向滑槽内均滑动连接有立杆,立杆上端的球形槽内均转动连接有滚球,可以进一步提升该爬线式机器人的悬挂稳定性。
12、进一步的,所述凹腔的内部底面设有前后对称的弹簧,两个弹簧的上端分别与竖向对应的立杆上端弧面固定连接,弹簧分别套设于竖向对应的立杆外部,可以促使立杆上移。
13、进一步的,所述销杆的右端设有涡轮,右侧的支座内部通过轴承转动连接有蜗杆,蜗杆与涡轮啮合连接,外壳上表面中部设置的电机输出轴与蜗杆的前端固定连接,电机的输入端电连接plc控制器的输出端,可以带动第二摆臂发生旋转。
14、与现有技术相比,本发明的有益效果是:本电力检修的爬线式机器人,具有以下好处:
15、1、在进行电力检修工作时,先将两个第一导向轮和第二导向轮一同悬挂在待检修电缆上方对应架设的轨道钢缆上,确保外壳位于轨道钢缆和待检修电缆之间,之后通过外部驱动设备的带动,外壳可以在两个第一导向轮和第二导向轮的支撑下沿着待检修电缆进行移动,使得摄像机对待检修电缆进行实时监测,当外壳移动至待检修电缆的故障点位时,摄像机将拍摄到的故障情况反馈至plc控制器,通过plc控制器的调控,两个检修机械手运转即可自动进行相应的检修工作,极大的降低了电力检修人员的劳动负担。
16、2、在外壳的移动过程中,通过plc控制器的调控,第三电动推杆收缩使得箍板后移与磁铁片吸附固定,通过衔接板、第二导向轮和箍板的抱合限位能够防止第二导向轮从轨道钢缆上跌落,且立杆在弹簧的弹性势能影响下可以使滚球始终与轨道钢缆接触,提升该爬线式机器人的悬挂稳定性,确保电力检修工作正常开展。
17、3、通过plc控制器的调控,第一电动推杆运转带动齿条板移动时,受齿条板与半齿环的啮合连接关系影响,第一摆臂能够以销柱为圆心进行倾斜摆动,第二电动推杆进行适度伸展则能够促使衔接板以外壳为基准发生相对竖向位移,而电机运转带动蜗杆旋转时,受蜗杆与涡轮的啮合连接关系影响,第二摆臂能够以销杆为圆心发生倾斜摆动,通过第一电动推杆、第二电动推杆和电机的配合,两个第一摆臂和第二摆臂能够分别进行独立位移,以免满足轨道钢缆与不同间距的待检修电缆之间的电力检修工作,且在轨道钢缆上存在衔接节点和支撑架等障碍物时,两个第一导向轮和第二导向轮能够在两个第一摆臂和第二摆臂的带动下逐一悬空,使得外壳在最低保留两个悬挂支撑点的情况下通过轨道钢缆上的障碍物,确保电力检修工作的持续开展。
技术特征:
1.一种电力检修的爬线式机器人,其特征在于:包括外壳(1)和爬线单元(5);
2.根据权利要求1所述的一种电力检修的爬线式机器人,其特征在于:所述爬线单元(5)还包括半齿环(55)、齿条板(56)和第一电动推杆(57),所述半齿环(55)分别设置于两个第一摆臂(53)的下端弧面上,立座(51)的内部均横向滑动连接有齿条板(56),外壳(1)的上表面设有左右对称的第一电动推杆(57),两个第一电动推杆(57)的伸缩端外侧端头分别与同侧相邻的齿条板(56)固定连接,齿条板(56)与竖向对应的半齿环(55)啮合连接,第一电动推杆(57)的输入端电连接plc控制器(6)的输出端。
3.根据权利要求2所述的一种电力检修的爬线式机器人,其特征在于:所述半齿环(55)的圆心均位于纵向对应的销柱(52)的中心轴线上。
4.根据权利要求1所述的一种电力检修的爬线式机器人,其特征在于:所述外壳(1)的上表面中部设有左右对称的支座(8),两个支座(8)之间通过销杆(9)转动连接有第二摆臂(10),第二摆臂(10)上端左右对称设置的安装槽内均设有第二电动推杆(11),第二电动推杆(11)的伸缩端上端与衔接板(12)固定连接,衔接板(12)的前侧面上端设有第三电动推杆(13),第三电动推杆(13)的固定端外弧面活动套设有第二导向轮(14),第二电动推杆(11)和第三电动推杆(13)的输入端均电连接plc控制器(6)的输出端。
5.根据权利要求4所述的一种电力检修的爬线式机器人,其特征在于:所述第三电动推杆(13)的伸缩端前端设有箍板(15),箍板(15)为l形铁质箍板。
6.根据权利要求5所述的一种电力检修的爬线式机器人,其特征在于:所述衔接板(12)的前侧面下端设有磁铁片(16),磁铁片(16)与箍板(15)的纵向板体位置对应。
7.根据权利要求5所述的一种电力检修的爬线式机器人,其特征在于:所述箍板(15)的纵向板体后端设有凹腔(17),凹腔(17)内部底面前后对称设置的竖向滑槽内均滑动连接有立杆(18),立杆(18)上端的球形槽内均转动连接有滚球(19)。
8.根据权利要求7所述的一种电力检修的爬线式机器人,其特征在于:所述凹腔(17)的内部底面设有前后对称的弹簧(20),两个弹簧(20)的上端分别与竖向对应的立杆(18)上端弧面固定连接,弹簧(20)分别套设于竖向对应的立杆(18)外部。
9.根据权利要求4所述的一种电力检修的爬线式机器人,其特征在于:所述销杆(9)的右端设有涡轮(21),右侧的支座(8)内部通过轴承转动连接有蜗杆(22),蜗杆(22)与涡轮(21)啮合连接,外壳(1)上表面中部设置的电机(23)输出轴与蜗杆(22)的前端固定连接,电机(23)的输入端电连接plc控制器(6)的输出端。
技术总结
本发明公开了一种电力检修的爬线式机器人,包括外壳和爬线单元;外壳:其底面中部设有凹槽,凹槽的内部顶壁中心处设有摄像机,凹槽的内部左右两端对称设有检修机械手;爬线单元:包括立座、销柱、第一摆臂和第一导向轮,所述立座对称设置于外壳的上表面左右两端,立座的内部均通过销柱转动连接有第一摆臂,第一摆臂的上端均通过销轴转动连接有第一导向轮;该电力检修的爬线式机器人,可以自动完成电力检修工作,极大的降低了人员的劳动负担,还能通过改变自身的悬挂高度来满足不同高度位置的电力检修工作,适用范围较广,且能够在保证移动稳定性的前提下自动绕开障碍物,确保电力检修工作的持续开展。
技术研发人员:郭栩
受保护的技术使用者:郑州鸿程电气设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!