一种励磁机转子摆度调整方法及调整系统与流程
本发明涉及发电机检修领域,尤其涉及一种励磁机转子摆度调整方法及调整系统。
背景技术:
1、励磁机与发电机在连接时,励磁机转子与发电机转子通过刚性联轴器进行连接,励磁机转子前端悬挂在发电机转子上,后端采用单轴瓦支撑。其中,发电机的重量远大于励磁机的重量,在励磁机与发电机连接后,由于重量原因,在旋转过程中,励磁机转子可能绕发电机转子呈锥形旋转,在旋转过程中产生一定的励磁机转子摆度,励磁机转子摆度产生的离心力直接作用到轴承上,对励磁机转子产生的振动起决定性作用。因此,在励磁机与发电机对中后,需对励磁机转子摆度进行调整,以保证其在正常运行时励磁机转子摆度的摆动范围在摆度误差范围以内;其中,励磁机转子摆度指的是励磁机转子与发电机转子对中后,受对轮端面瓢偏、励磁机转子弯曲等因素的影响,在旋转过程中,发电机转子与励磁机转子旋转时轴线不同心,且滚珠盘和浮动轴瓦不约束励磁机转子水平方向的运动,导致励磁机转子末端产生水平摆动,产生的水平摆动的最大值与最小值之间的差值。
2、目前,在现有技术中,对励磁机转子摆度调整时,常依靠经验对励磁机转子摆度进行调整,没有系统的励磁机转子摆度调整方法,常出现在调整励磁机转子摆度时因对轮端面原始瓢偏值误差较大而导致励磁机转子摆度无法调整至符合摆度误差范围内,从而需要重新调整励磁机对轮的问题,导致了励磁机转子的摆度调整过程效率低。
技术实现思路
1、本发明要解决的技术问题在于,提供一种励磁机转子摆度调整方法及调整系统。
2、本发明解决其技术问题所采用的技术方案是:提供一种励磁机转子摆度调整方法,包括以下步骤:
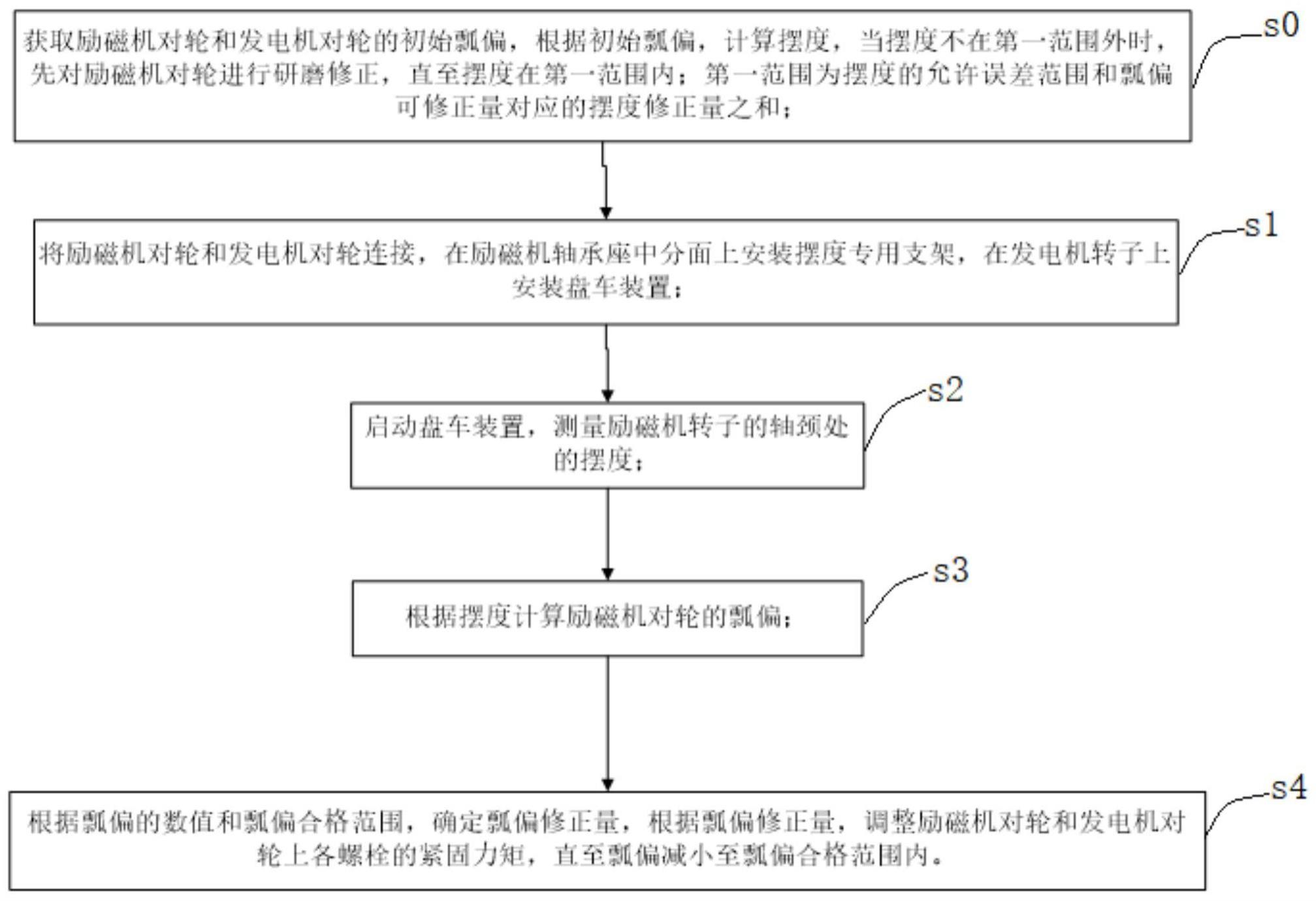
3、s1,将励磁机对轮和发电机对轮以螺栓连接并对各螺栓施加初始力矩,在励磁机轴承座中分面上安装摆度专用支架,在发电机转子上安装盘车装置;
4、s2,启动盘车装置,测量励磁机转子的轴颈处的摆度,作为实际摆渡;
5、s3,根据所述摆度计算励发对轮的瓢偏,作为实际瓢偏;
6、s4,根据所述瓢偏的数值和瓢偏合格范围,确定瓢偏修正量,根据所述瓢偏修正量,调整所述励磁机对轮和所述发电机对轮上各螺栓的紧固力矩,直至所述励发对轮的瓢偏减小至所述瓢偏合格范围内。
7、优选地,在所述步骤s2中包括:在所述励磁机转子的所述轴颈处的外周面安装第三位移传感器,测量所述励磁机对轮的端面上的每一螺栓孔位对应的所述励磁机转子的所述轴颈处的径向测量值,并获取所述径向测量值中的最大值和最小值之间的差值,所述差值为所述摆度。
8、优选地,在步骤s1之前,还包括s0,获取所述励磁机对轮和所述发电机对轮的瓢偏,作为初始瓢偏,根据所述瓢偏,计算摆度,作为初始摆渡;当所述摆度不在第一范围内时,先对所述励磁机对轮的端面进行研磨修正,直至所述摆度在第一范围内;所述第一范围在摆度合格范围和瓢偏可修正量对应的摆度修正量的叠加范围内。
9、优选地,所述瓢偏可修正量指的是,所述励发对轮上的螺栓上允许施加的最大力矩和最小力矩对应的轴向压缩量之间的差值。
10、优选地,在所述步骤s3中,所述瓢偏根据公式五的计算过程确定,公式五的计算过程为:
11、
12、其中,jk为所述摆度,cd为励磁机转子的轴线长度,fg为所述励磁机对轮的所述瓢偏,ef为励磁机对轮的直径长度。
13、优选地,瓢偏可修正量和螺栓力矩之间的关系通过公式四的计算过程确定,公式四的计算过程为:
14、
15、△l为励磁机对轮轴向压缩量,单位是m;f为螺栓的预紧力,单位是n;l为励磁机对轮的被压缩位置初始轴向厚度,单位是m;e为励磁机对轮的弹性模量,单位是pa;a为发电机对轮2与励磁机对轮的配合面的接触面积,单位是m2;n为励磁机对轮的端面上的螺栓个数;t为螺栓力矩,单位是nm;m为螺栓的拧紧力矩系数;d为螺栓公称直径,单位是m;d1为励磁机对轮与发电机对轮接触面的外径,单位是m;d2为励磁机对轮与发电机对轮接触面的内径,单位是m。
16、本发明还提供一种励磁机转子摆度调整系统,包括:
17、盘车模块,所述盘车模块设于发电机转子上,用于控制所述发电机转子转动并带动励磁机转子转动;
18、螺栓紧固模块,用于调整励发对轮上各螺栓的力矩;
19、测量模块,用于测量所述励磁机转子轴径处的摆度;
20、数据采集分析模块,
21、设置有瓢偏允许范围及摆度合格范围,所述数据采集分析模块用于接收所述励磁机转子的所述摆度,并对接收到的所述励磁机转子的所述摆度进行比对,生成比对结果,以及根据对比结果生成螺栓力矩调整方案;
22、与所述数据采集分析模块通讯连接的控制模块,所述控制模块根据所述螺栓力矩调整方案,控制所述螺栓紧固模块调整所述螺栓上的力矩。
23、优选地,所述测量模块包括:
24、安装于所述励磁机转子的轴颈处的第三位移传感器,与所述数据采集分析模块通讯连接,用于测量所述励磁机转子摆度;以及
25、用于测量转子转动角度的角度测量单元,与所述数据采集分析模块通讯连接。
26、优选地,所述第三位移传感器为无线式百分表;
27、所述角度测量单元包括吸附在所述励磁机对轮的外周的吸附式螺旋孔位标记、设于所述励磁机对轮的外圈且指向所述吸附式螺旋孔位标记的电涡流传感器。
28、优选地,所述盘车模块上设置有外啮合齿轮,所述外啮合齿轮与发电机转子上的齿轮啮合,以带动所述发电机转子转动;
29、所述螺栓紧固模块包括套设在所述励磁机转子对轮的端面螺栓上的电动扳手,每一所述螺栓上套设一所述电动扳手。
30、实施本发明具有以下有益效果:在对励磁机转子摆度调整过程中,先测量励磁机转子的轴颈处的摆度,根据摆度计算励磁机对轮的瓢偏,根据瓢偏和瓢偏合格范围,将确定瓢偏修正量,将励磁机对轮的瓢偏修正至瓢偏合格范围内,进而对励磁机转子的摆度进行调整,避免了在励磁机转子的摆度调整过程中因励磁机对轮的瓢偏不在瓢偏允许范围内而导致无法将励磁机转子的摆度调整至符合摆度合格范围的问题;同时,无需多次调整励磁机对轮的瓢偏,避免了同一工序反复执行的问题,提高了励磁机转子的摆度调整效率。
技术特征:
1.一种励磁机转子摆度调整方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的励磁机转子摆度调整方法,其特征在于,在所述步骤s2中包括:在所述励磁机转子的所述轴颈处的外周面安装第三位移传感器,测量所述励磁机对轮的端面上的每一螺栓孔位对应的所述励磁机转子的所述轴颈处的径向测量值,并获取所述径向测量值中的最大值和最小值之间的差值,所述差值为所述摆度。
3.根据权利要求1所述的励磁机转子摆度调整方法,其特征在于,在步骤s1之前,还包括s0,获取所述励磁机对轮和所述发电机对轮的瓢偏,作为初始瓢偏,根据所述瓢偏,计算摆度,作为初始摆度;当所述摆度不在第一范围内时,先对所述励磁机对轮的端面进行研磨修正,直至所述摆度在第一范围内;所述第一范围在摆度合格范围和瓢偏可修正量对应的摆度修正量的叠加范围内。
4.根据权利要求3所述的励磁机转子摆度调整方法,其特征在于,所述瓢偏可修正量指的是,所述励发对轮上的螺栓上允许施加的最大力矩和最小力矩对应的轴向压缩量之间的差值。
5.根据权利要求1或3所述的励磁机转子摆度调整方法,其特征在于,在所述步骤s3中,所述瓢偏根据公式五的计算过程确定,公式五的计算过程为:
6.根据权利要求4所述的励磁机转子摆度调整方法,其特征在于,瓢偏可修正量和螺栓力矩之间的关系通过公式四的计算过程确定,公式四的计算过程为:
7.一种励磁机转子摆度调整系统,其特征在于,包括:
8.根据权利要求7所述的励磁机转子摆度调整系统,其特征在于,所述测量模块包括:
9.根据权利要求8所述的励磁机转子摆度调整系统,其特征在于,所述第三位移传感器为无线式百分表;
10.根据权利要求7所述的励磁机转子摆度调整系统,其特征在于,所述盘车模块上设置有外啮合齿轮,所述外啮合齿轮与发电机转子上的齿轮啮合,以带动所述发电机转子转动;
技术总结
本发明公开了一种励磁机转子摆度调整方法及调整系统,所述调整方法包括:将励磁机对轮和发电机对轮以螺栓连接并对各螺栓施加初始力矩,在励磁机轴承座中分面上安装摆度专用支架,在发电机转子上安装盘车装置;启动盘车装置,测量励磁机转子的轴颈处的摆度,作为实际摆度;根据所述摆度计算励发对轮的瓢偏,作为实际瓢偏;根据所述瓢偏的数值和瓢偏合格范围,确定瓢偏修正量,根据所述瓢偏修正量,调整所述励磁机对轮和所述发电机对轮上各螺栓的紧固力矩,直至所述励发对轮瓢偏减小至所述瓢偏合格范围内。本发明避免了因励磁机对轮瓢偏不在瓢偏合格范围内导致励磁机转子摆度无法调整至符合摆度合格范围以及同一工序反复执行的问题。
技术研发人员:苑令辉,周功林,张亚辉,王德朝,王铁超,王辉,李美映,彭方顺,庞旭阳,高洪生,黄青俊,丁超群
受保护的技术使用者:中广核核电运营有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!