一种异步电机的矢量控制调速系统的制作方法
本发明属于电机控制,具体涉及一种异步电机的矢量控制调速系统。
背景技术:
1、目前较为成熟的变频调速系统包括转差频率控制、恒压频比控制、矢量控制以及直接转矩控制等。其中较为先进的是矢量控制策略,这种具有新颖性与实用性的方法已经成为了现代交流电动机调速系统的重要研究方向之一。得益于大规模集成电路的快速发展与电力电子器件的进步,近些年来产生了众多诸如dsp、msp等微处理器,使得我们能够通过软件来实现冗杂的控制算法,因此交流电动机的调速可以通过数字驱动系统实现。通过数字途径实现调速,可以根据需要实现异步电动机的速度控制,并且系统效率能得以提升、能量损耗能得以减少、系统的噪声也可以有效抑制。数字与软件控制的灵活性,可迅速修改性,使其在未来电机调速方面终将占据重要的地位。
2、目前交流电机矢量控制系统仍然是以坐标变换、svpwm、转子磁链计算、转速调节器、励磁电流调节器、转矩电流调节器为核心。代表有直接转矩控制,直接转矩控制因其将转速环中反馈的转矩用于直接控制电动机电磁转矩得名,这种控制系统是一种高动态性能的交流电动机变压变频调速系统,但因为磁链计算采用带积分环节的电压模型,因此误差的累积与定子电阻的变化都会影响到磁链计算的准确性。
3、按转子磁链定向的矢量控制方式通常使用的是间接定向,即根据给定磁链、给定转矩电流以及反馈角频率进行计算。间接定向的方法较直接定向的方法更依赖于电机参数。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种异步电机的矢量控制调速系统,以提高效率,降低能量损耗和系统噪声。
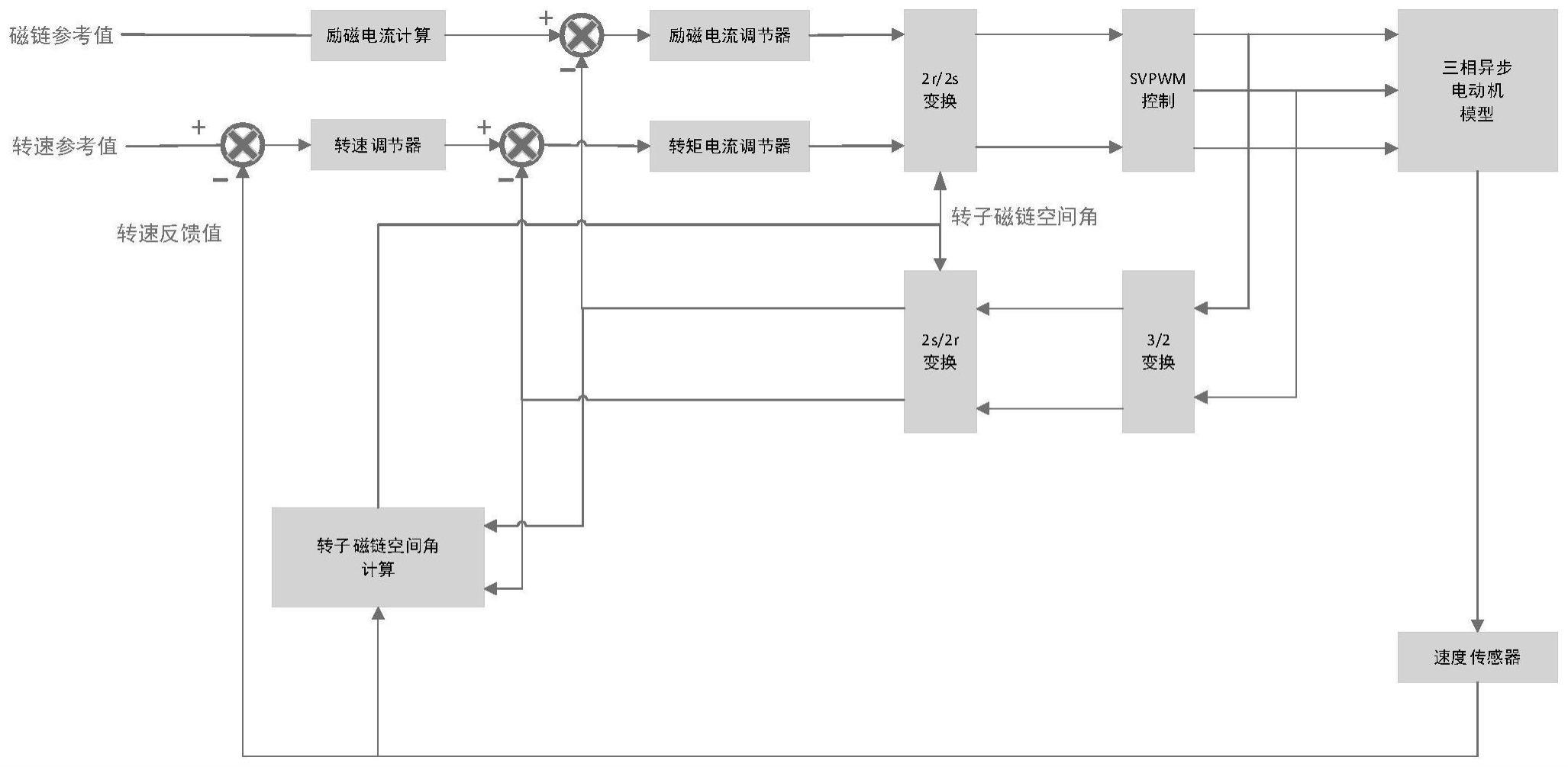
2、为解决上述技术问题,本发明提供一种异步电机的矢量控制调速系统,包括:
3、励磁电流计算模块,用于根据输入的磁链参考值,输出d轴电流参考值;
4、转速调节器模块,用于根据输入的转速参考值与实际转速的差值,输出q轴电流参考值;
5、励磁电流调节器,用于根据输入的d轴电流参考值与实际d轴电流的差值,输出d轴电压调制波;
6、转矩电流调节器,用于根据输入的q轴电流参考值与实际q轴电流的差值,输出q轴电压调制波;
7、坐标变换模块,用于将两相正交旋转坐标系的值转换为两相静止坐标系的值;
8、电流值转换模块,用于将三相静止坐标系的电流值转换为两相静止坐标系的值;
9、空间电压矢量调制模块,用于将电压调制波转换为pwm波并输出至三相异步电动机的端口进行驱动;
10、转子磁链空间角计算模块,用于通过测量三相异步电动机的实际转速和实际d轴、q轴电流,计算得到实时的转子磁链空间角,作为转速调节器中的坐标变换相角输入。
11、进一步地,所述转子磁链空间角计算模块具体用于:
12、联立磁链方程和电压方程,并代入转矩方程与运动方程,得到状态方程;
13、令同步旋转的正交坐标系的d轴与转子磁链矢量重合,由d-q坐标系改为m-t坐标系,其中d轴对应m轴,q轴对应t轴,m轴与转子磁链始终重合;
14、通过定子m轴电流、t轴电流计算得到m-t坐标系的转子磁链与旋转角速度;
15、根据转子磁链与旋转角速度计算得到转子磁链的空间角。
16、进一步地,所述磁链方程为:
17、
18、其中,ψsd为定子d轴磁链,ψsq为定子q轴磁链,ψrd为转子d轴磁链,ψrq为转子q轴磁链,ls为定子自感,lr为转子自感,lm为定子与转子之间的互感,isd为定子d轴电流,isq为定子q轴电流,ird为转子d轴电流,irq为转子q轴电流;
19、所述电压方程为:
20、
21、其中,rs为定子相电阻,rr为转子相电阻,usd为定子d轴电压,usq为定子q轴电压,ω1为定子磁动势角速度,ω为转子角速度。
22、进一步地,所述状态方程为:
23、
24、其中,tr为转子电磁时间常数,σ为电动机漏磁系数,tl为负载转矩,np为电动机极对数,j为转动惯量。
25、进一步地,由d-q坐标系改为m-t坐标系时,有:
26、
27、
28、代入到状态方程中得到:
29、
30、进一步地,由状态方程第三行公式得到:
31、
32、则m-t坐标系的旋转角速度表示为:
33、
34、进一步地,根据转子磁链ψr与旋转角速度ω1计算得到转子磁链的空间角具体是:
35、
36、其中,通过ism,ist计算ψr与ω1,进而得到转子磁链的空间角
37、进一步地,所述svpwm模块进一步包括:扇区计算模块、变量计算模块、作用时间计算模块、时间切换点计算模块和svpwm产生模块。
38、进一步地,所述系统采用pi调节器用于转速、转矩电流以及励磁电流闭环控制。
39、进一步地,所述系统通过改变输入侧的磁链、转速参考值来控制电动机的转速。
40、实施本发明具有如下有益效果:本发明采用按转子磁链定向的磁链开环转差型矢量控制系统,模型简单,应用广,能够将实现将电流励磁分量和转矩分量完全解耦的目的;利用坐标变换,将三相静止坐标系转换为同步旋转的坐标系,可以按照控制直流电动机的方法来控制异步电动机的转矩电流与励磁电流,使得系统效率得以提升、能量损耗得以减少、系统的噪声也可以有效抑制。
技术特征:
1.一种异步电机的矢量控制调速系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述转子磁链空间角计算模块具体用于:
3.根据权利要求2所述的系统,其特征在于,所述磁链方程为:
4.根据权利要求3所述的系统,其特征在于,所述状态方程为:
5.根据权利要求4所述的系统,其特征在于,由d-q坐标系改为m-t坐标系时,有:
6.根据权利要求5所述的系统,其特征在于,由状态方程第三行公式得到:
7.根据权利要求6所述的系统,其特征在于,根据转子磁链ψr与旋转角速度ω1计算得到转子磁链的空间角具体是:
8.根据权利要求1所述的系统,其特征在于,所述svpwm模块进一步包括:扇区计算模块、变量计算模块、作用时间计算模块、时间切换点计算模块和svpwm产生模块。
9.根据权利要求1所述的系统,其特征在于,所述系统采用pi调节器用于转速、转矩电流以及励磁电流闭环控制。
10.根据权利要求1所述的系统,其特征在于,所述系统通过改变输入侧的磁链、转速参考值来控制电动机的转速。
技术总结
本发明公开一种异步电机的矢量控制调速系统,包括:励磁电流计算模块、转速调节器模块、励磁电流调节器、转矩电流调节器、坐标变换模块、电流值转换模块,空间电压矢量调制模块和转子磁链空间角计算模块,转子磁链空间角计算模块通过测量三相异步电动机的实际转速和实际d轴、q轴电流,计算得到实时的转子磁链空间角,作为转速调节器中的坐标变换相角输入。本发明通过改变输入侧的磁链、转速参考值即可控制电动机的转速,能够实现快速动态响应,并且SVPWM的控制使得系统的效率得以提高,从而达到降低能耗的作用。
技术研发人员:樊丽娟,李鸿鑫,程卓,柳洲
受保护的技术使用者:深圳供电局有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!