一种双余度电机、动力装置及无人飞行器的制作方法
本发明涉及电机,尤其涉及一种双余度电机、动力装置及无人飞行器。
背景技术:
1、无人机等飞行器在旅行航拍、电力巡检、地质测绘等领域的应用越来越广泛。无人机通常都具有多个机臂组件和安装于机臂上的动力驱动系统,动力驱动系统包括电池、螺旋桨、电机和电子调速器。电机通常需要固定在机臂的电机安装座上,由电池提供能量来源,电子调速器控制电机带动螺旋桨旋转,提供升力,为无人机提供飞行动力。一旦电机或者电子调速器失效,必须紧急迫降,严重的时候可能姿态失控直接炸机,因此动力系统的可靠性对无人机飞行安全有至关重要的作用。传统的动力系统存在如下几个缺点:
2、当电机绕组温度过高、环境恶劣时,绕组失效引起电机及整个动力系统失效,有炸机风险。或者,动力电机的电机性能和kv值(kv值的概念是指无刷电机工作电压每提升1v无刷电机所增加的转速)是确定的,电机适配桨叶规格比较单一。或者,飞行器动力系统需配备两套动力系统,以适应平原和高原两种不同的飞行环境,导致结构复杂,成本高。或者,动力电机的电机绕组存在散热不良问题,无人机在复杂的环境下飞行时,容易发生烧电机现象,严重影响电机效率及无人机安全性。或者,动力电机的动力系统效率偏低,导致无人机续航时间短且浪费能源。或者,动力电机不能适时启动冗余保护机制。或者,动力驱动系统无锁桨功能或者无法准确锁桨,影响整机气动效果,进而导致飞行续航时间短。
3、鉴于以上原因,有必要对现有技术中无人机的动力系统进行优化改进。
技术实现思路
1、本发明提供的实施例提供一种双余度电机,能低成本实现冗余保护,并能适用于不同的飞行环境,所述双余度电机包括:转子和定子,所述定子的绕组采用双余度设计,即设有第一余度绕组和第二余度绕组两套绕组,且所述第一余度绕组和所述第二余度绕组能各自单独或协同工作,从而可实现冗余保护;所述第一余度绕组和所述第二余度绕组具有三种工作模式,即仅所述第一余度绕组工作,仅所述第二余度绕组工作,所述第一余度绕组和所述第二余度绕组同时工作;所述双余度电机可在所述三种工作模式间进行切换。
2、本发明实施例的双余度电机还可采用如下优选/可选的具体实施方式:
3、所述第一余度绕组是星型连接或三角形连接,所述第二余度绕组是星型连接或三角形连接;所述第一余度绕组和所述第二余度绕组之间是串联连接或并联连接。
4、所述第一余度绕组和所述第二余度绕组的每相间均分别安装有用于实时反馈绕组温度的ptc热敏电阻,或所述第一余度绕组和所述第二余度绕组的对应相之间共用一个ptc热敏电阻。
5、所述双余度电机为三相永磁同步电机,每个余度绕组有三相,每相余度绕组间均安装有ptc热敏电阻,,或所述第一余度绕组和所述第二余度绕组的对应相之间共用一个ptc热敏电阻;
6、各所述ptc热敏电阻之间具有预定的间隔。
7、还设有可实时反馈电机转子位置的位置传感器。
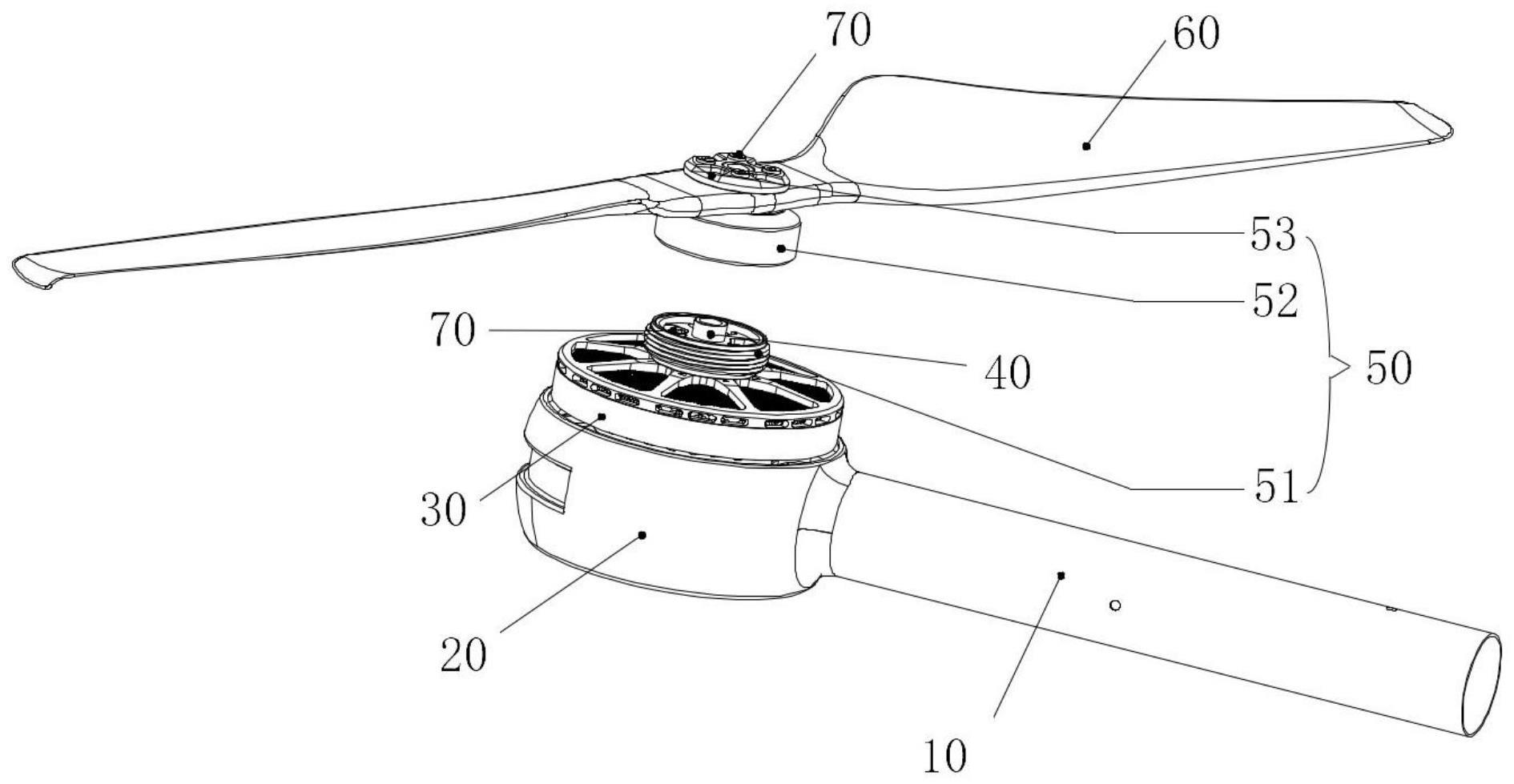
8、本发明的实施例还提供一种动力装置,包括双余度电机,分别与之连接的螺旋桨和电子调速器,所述双余度电机包括:转子和定子,所述定子的绕组采用双余度设计,即设有第一余度绕组和第二余度绕组两套绕组,且所述第一余度绕组和所述第二余度绕组能各自单独或协同工作,从而可实现冗余保护;
9、所述第一余度绕组和所述第二余度绕组具有三种工作模式,即仅所述第一余度绕组工作,仅所述第二余度绕组工作,所述第一余度绕组和所述第二余度绕组同时工作;
10、所述双余度电机可在所述三种工作模式间进行切换;
11、所述电子调速器包括模式控制单元,所述在所述三种工作模式间进行切换通过所述模式控制单元实现。
12、本发明实施例的动力装置还可采用如下优选/可选的具体实施方式:
13、所述第一余度绕组和所述第二余度绕组分别安装有用于实时反馈绕组温度至所述电子调速器的ptc热敏电阻;当所述ptc热敏电阻反馈的绕组温度高于预设值时,触发所述模式控制单元进行工作模式的切换。
14、还设有可实时反馈电机转子位置至所述电子调速器的位置传感器。
15、所述双余度电机为三相永磁同步电机,每个余度绕组有三相,每相余度绕组间均安装有用于实时反馈绕组温度至所述电子调速器的ptc热敏电阻,各所述ptc热敏电阻之间具有预定的间隔;还设有可实时反馈电机转子位置至所述电子调速器的位置传感器;当所述动力装置无需动力输出或不能正常进行动力输出时,通过所述模式控制单元对所述螺旋桨启用锁桨功能。
16、本发明的实施例还提供一种飞行器,包括飞行器主体和多个动力装置,所述动力装置为如上文任一项所述的动力装置。
17、本发明的实施例与现有技术相比至少具有如下有益效果:
18、所述双余度电机,能低成本实现冗余保护,并能适用于不同的飞行环境,比如通过工作模式的适当切换,即可实现在平原或高原地带的正常飞行。
19、通过所述ptc热敏电阻反馈的绕组温度来触发工作模式的切换,能够在恰当的时机进行工作模式的切换,不但实现冗余保护,还能提高动力装置的效率。
20、通过所述ptc热敏电阻反馈的绕组温度、位置传感器实时反馈的电机转子位置与模式控制单元等的相互配合,不但能够实现冗余保护,还能通过锁桨兼顾节能/续航,一举两得,在长时间连续飞行时节能效果尤为明显。
技术特征:
1.一种双余度电机,其特征在于,包括:转子和定子,所述定子的绕组采用双余度设计,即设有第一余度绕组和第二余度绕组两套绕组,且所述第一余度绕组和所述第二余度绕组能各自单独或协同工作,从而可实现冗余保护;
2.如权利要求1所述的双余度电机,其特征在于,所述第一余度绕组是星型连接或三角形连接,所述第二余度绕组是星型连接或三角形连接;
3.如权利要求1所述的双余度电机,其特征在于,所述第一余度绕组和所述第二余度绕组的每相间均分别安装有用于实时反馈绕组温度的ptc热敏电阻,或所述第一余度绕组和所述第二余度绕组的对应相之间共用一个ptc热敏电阻。
4.如权利要求1所述的双余度电机,其特征在于,所述双余度电机为三相永磁同步电机,每个余度绕组有三相,每相余度绕组间均安装有ptc热敏电阻,或所述第一余度绕组和所述第二余度绕组的对应相之间共用一个ptc热敏电阻;
5.如权利要求1所述的双余度电机,其特征在于,还设有可实时反馈电机转子位置的位置传感器。
6.一种动力装置,其特征在于,包括双余度电机,分别与之连接的螺旋桨和电子调速器,所述双余度电机包括:转子和定子,所述定子的绕组采用双余度设计,即设有第一余度绕组和第二余度绕组两套绕组,且所述第一余度绕组和所述第二余度绕组能各自单独或协同工作,从而可实现冗余保护;
7.如权利要求6所述的动力装置,其特征在于,所述第一余度绕组和所述第二余度绕组分别安装有用于实时反馈绕组温度至所述电子调速器的ptc热敏电阻;
8.如权利要求6所述的动力装置,其特征在于,还设有可实时反馈电机转子位置至所述电子调速器的位置传感器。
9.如权利要求6所述的动力装置,其特征在于,所述双余度电机为三相永磁同步电机,每个余度绕组有三相,每相余度绕组间均安装有用于实时反馈绕组温度至所述电子调速器的ptc热敏电阻,各所述ptc热敏电阻之间具有预定的间隔;
10.一种无人飞行器,其特征在于,包括飞行器主体和多个动力装置,所述动力装置为如权利要求6-9任一项所述的动力装置。
技术总结
本发明公开了一种双余度电机、动力装置及无人飞行器,所述双余度电机包括转子和定子,所述定子的绕组采用双余度设计,即设有第一绕组和第二绕组两套绕组,且所述第一绕组和所述第二绕组能各自单独或协同工作,从而可实现冗余保护;所述第一绕组和所述第二绕组具有三种工作模式,即仅所述第一绕组工作,仅所述第二绕组工作,所述第一绕组和所述第二绕组同时工作;所述双余度电机可在所述三种工作模式间进行切换。本发明实施例的所述双余度电机,能低成本实现冗余保护,并能适用于不同的飞行环境,比如通过工作模式的适当切换,即可实现在平原或高原地带的正常飞行。
技术研发人员:夏书岳,田玲,范欣林,田刚印
受保护的技术使用者:深圳联合飞机科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!