一种电机控制方法、装置、设备及计算机可读存储介质与流程
本发明涉及电机控制领域,特别是涉及一种电机控制方法,本发明还涉及一种电机控制装置、设备及计算机可读存储介质。
背景技术:
1、电机作为各个领域广泛应用的设备,在某些情况下成对出现,且需要保证两个电机的相位差维持在预设值,从而满足电机所在设备的需求,然而现有技术中缺少一种成熟的电机控制方法,导致难以控制两个电机的相位差保持在预设值,一旦相位差不正确则需要停机维护,降低了工作效率以及用户体验。
2、因此,如何提供一种解决上述技术问题的方案是本领域技术人员目前需要解决的问题。
技术实现思路
1、本发明的目的是提供一种电机控制方法,不但能够控制两电机转速同步从而保持相位差不变,而且每次对于速度给定值的调整均可以参考速度偏差量的微分值,防止单次调节量的过冲,能够抑制系统振荡,提升了工作效率以及用户体验;本发明的另一目的是提供一种电机控制装置、设备及计算机可读存储介质,不但能够控制两电机转速同步从而保持相位差不变,而且每次对于速度给定值的调整均可以参考速度偏差量的微分值,防止单次调节量的过冲,能够抑制系统振荡,提升了工作效率以及用户体验。
2、为解决上述技术问题,本发明提供了一种电机控制方法,包括:
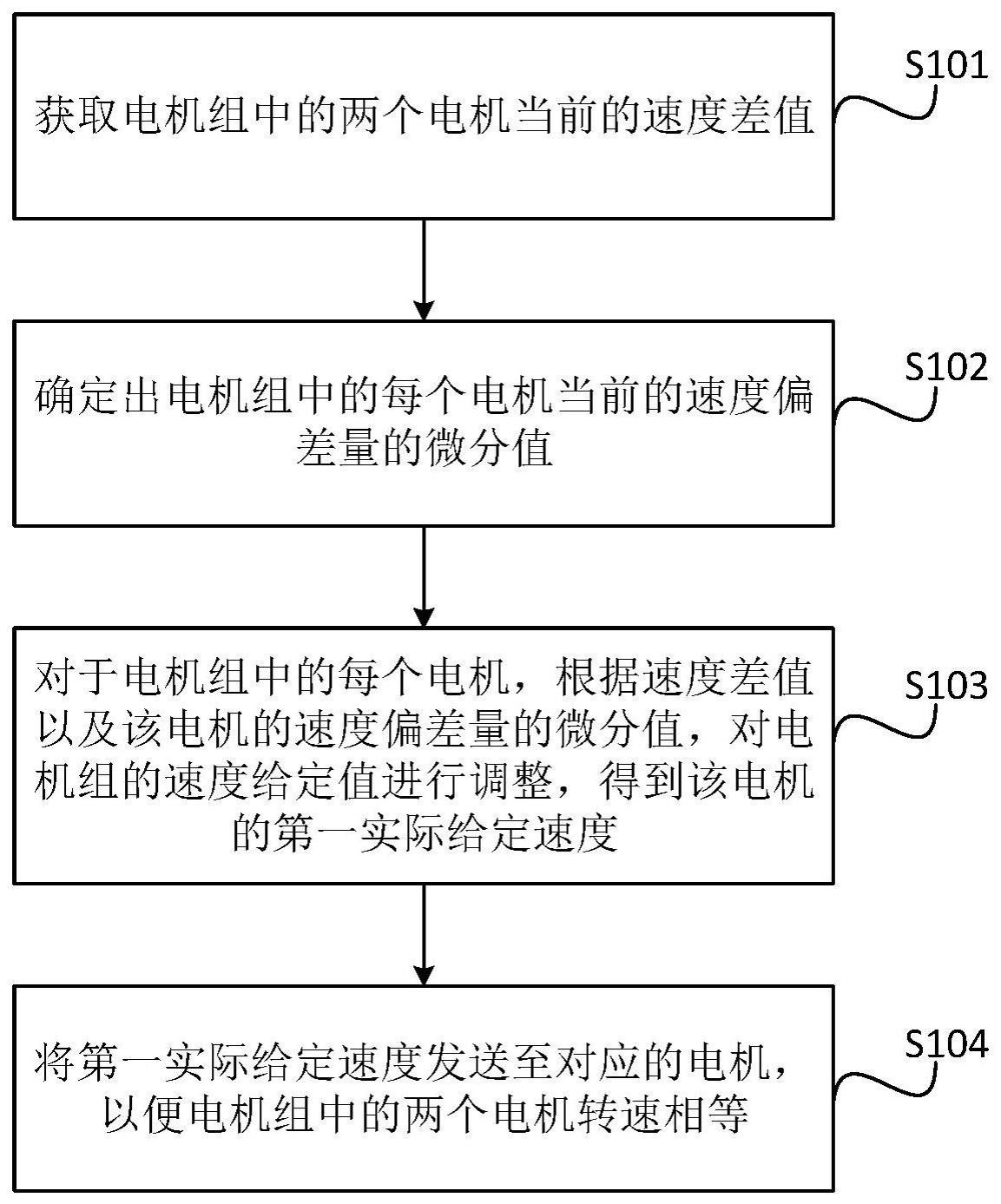
3、获取电机组中的两个电机当前的速度差值;
4、确定出所述电机组中的每个电机当前的速度偏差量的微分值;
5、对于所述电机组中的每个电机,根据所述速度差值以及该电机的所述速度偏差量的微分值,对所述电机组的速度给定值进行调整,得到该电机的第一实际给定速度;
6、将所述第一实际给定速度发送至对应的电机,以便所述电机组中的两个电机转速相等。
7、优选地,该电机控制方法还包括:
8、判断所述电机组中的两个电机的实时相位差相对于预设相位差的相位差偏差量是否大于预设阈值;
9、若大于,则停止发送所述第一实际给定速度,并为两个电机生成具备转速差的第二实际给定速度;
10、将所述第二实际给定速度发送至对应的电机,以便所述电机组中的两个电机的相位差等于所述预设相位差;
11、在所述电机组中的两个电机的相位差等于所述预设相位差时,执行所述对于所述电机组中的每个电机,根据所述速度差值以及该电机的所述速度偏差量的微分值,对所述电机组的速度给定值进行调整,得到该电机的第一实际给定速度的步骤。
12、优选地,所述为两个电机生成具备转速差的第二实际给定速度包括:
13、根据正值的预设转速补偿与所述电机组中相位超前的电机当前的所述速度偏差量的微分值,对所述电机组中相位超前的电机的速度给定值进行调整,得到该电机的第二实际给定速度;
14、根据负值的预设转速补偿与所述电机组中相位落后的电机当前的所述速度偏差量的微分值,对所述电机组中相位落后的电机的速度给定值进行调整,得到该电机的第二实际给定速度。
15、优选地,所述对于所述电机组中的每个电机,根据所述速度差值以及该电机的所述速度偏差量的微分值,对所述电机组的速度给定值进行调整,得到该电机的第一实际给定速度具体为:
16、
17、其中,w为第一实际给定速度,wr为速度给定值,ks为速度偏差量的微分值,kf为转速差反馈值,kd以及kp均为预设常值,wo为电机组中单个电机当前的速度测量值,t为wo的采样周期,w1为第一电机当前的速度测量值,w2为第二电机当前的速度测量值。
18、优选地,所述根据正值的预设转速补偿与所述电机组中相位超前的电机当前的所述速度偏差量的微分值,对所述电机组中相位超前的电机的速度给定值进行调整,得到该电机的第二实际给定速度具体为:
19、
20、其中,wc为所述预设转速补偿;
21、所述根据负值的预设转速补偿与所述电机组中相位落后的电机当前的所述速度偏差量的微分值,对所述电机组中相位落后的电机的速度给定值进行调整,得到该电机的第二实际给定速度具体为:
22、
23、优选地,该电机控制方法还包括:
24、响应于通过人机交互装置接收到的目标速度修改指令,对所述电机组的所述速度给定值进行修改。
25、优选地,所述人机交互装置为触控屏。
26、为解决上述技术问题,本发明还提供了一种电机控制装置,包括:
27、获取模块,用于获取电机组中的两个电机当前的速度差值;
28、确定模块,用于确定出所述电机组中的每个电机当前的速度偏差量的微分值;
29、调整模块,用于对于所述电机组中的每个电机,根据所述速度差值以及该电机的所述速度偏差量的微分值,对所述电机组的速度给定值进行调整,得到该电机的第一实际给定速度;
30、发送模块,用于将所述第一实际给定速度发送至对应的电机,以便所述电机组中的两个电机转速相等。
31、为解决上述技术问题,本发明还提供了一种电机控制设备,包括:
32、存储器,用于存储计算机程序;
33、处理器,用于执行所述计算机程序时实现如上所述电机控制方法的步骤。
34、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述电机控制方法的步骤。
35、本发明提供了一种电机控制方法,考虑到单独通过电机组中两个电机的速度差值对速度给定值进行反馈调节可能由于调节量过大而造成系统振荡,而电机组中每个电机的速度偏差量的微分值可以反映该电机速度偏差量实时的变化量,因此本申请中对于电机组中的每个电机,可以在电机组中的两个电机当前的速度差值的基础上,结合该电机当前的速度偏差量的微分值,对电机组的速度给定值进行调整,得到该电机的第一实际给定速度,不但能够控制两电机转速同步从而保持相位差不变,而且每次对于速度给定值的调整均可以参考速度偏差量的微分值,防止单次调节量的过冲,能够抑制系统振荡,提升了工作效率以及用户体验。
36、本发明还提供了一种电机控制装置、设备及计算机可读存储介质,具有如上电机控制方法相同的有益效果。
技术特征:
1.一种电机控制方法,其特征在于,包括:
2.根据权利要求1所述的电机控制方法,其特征在于,该电机控制方法还包括:
3.根据权利要求2所述的电机控制方法,其特征在于,所述为两个电机生成具备转速差的第二实际给定速度包括:
4.根据权利要求3所述的电机控制方法,其特征在于,所述对于所述电机组中的每个电机,根据所述速度差值以及该电机的所述速度偏差量的微分值,对所述电机组的速度给定值进行调整,得到该电机的第一实际给定速度具体为:
5.根据权利要求4所述的电机控制方法,其特征在于,所述根据正值的预设转速补偿与所述电机组中相位超前的电机当前的所述速度偏差量的微分值,对所述电机组中相位超前的电机的速度给定值进行调整,得到该电机的第二实际给定速度具体为:
6.根据权利要求1至5任一项所述的电机控制方法,其特征在于,该电机控制方法还包括:
7.根据权利要求6所述的电机控制方法,其特征在于,所述人机交互装置为触控屏。
8.一种电机控制装置,其特征在于,包括:
9.一种电机控制设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述电机控制方法的步骤。
技术总结
本发明公开了一种电机控制方法、装置、设备及计算机可读存储介质,属于电机控制领域,用于控制电机组中的两个电机保持固定相位差,解决了电机组中的两个电机的相位差难以保持固定的问题。本申请中对于电机组中的每个电机,可以在电机组中的两个电机当前的速度差值的基础上,结合该电机当前的速度偏差量的微分值,对电机组的速度给定值进行调整,得到该电机的第一实际给定速度,不但能够控制两电机转速同步从而保持相位差不变,而且每次对于速度给定值的调整均可以参考速度偏差量的微分值,防止单次调节量的过冲,能够抑制系统振荡,提升了工作效率以及用户体验。
技术研发人员:李明,李文全,付善强,虞大联,李云峰
受保护的技术使用者:中车青岛四方机车车辆股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!