直线电机控制系统和直线电机设备的制作方法
本申请涉及电气工程,特别是涉及一种直线电机控制系统和直线电机设备。
背景技术:
1、随着新技术在制造业中的广泛推广和深入应用,伺服系统作为运动控制系统的核心组成部分,在现代科技领域的发展中具有重要意义。伺服系统在诸如数控机床等领域有着广泛的应用,如定位控制、轨迹跟踪和加工控制等。为了满足现代伺服系统对高速度和高精度的要求,直线电机作为一种直接驱动的关键组件在伺服系统中得到了广泛应用。直线电机的特点在于将电能直接转换为机械能,无需中间传动机构,这使其具有推力大、速度快和高精度等优势,因此在工业生产、自动化设备、医疗器械等领域得到广泛应用,
2、然而,相关技术中,直线电机的伺服控制系统很容易受到诸多非线性因素的影响,控制性能较差。
技术实现思路
1、基于此,有必要提供一种直线电机控制系统和直线电机设备,其能够精确、快速地收敛到平衡点,具有较好的控制性能。
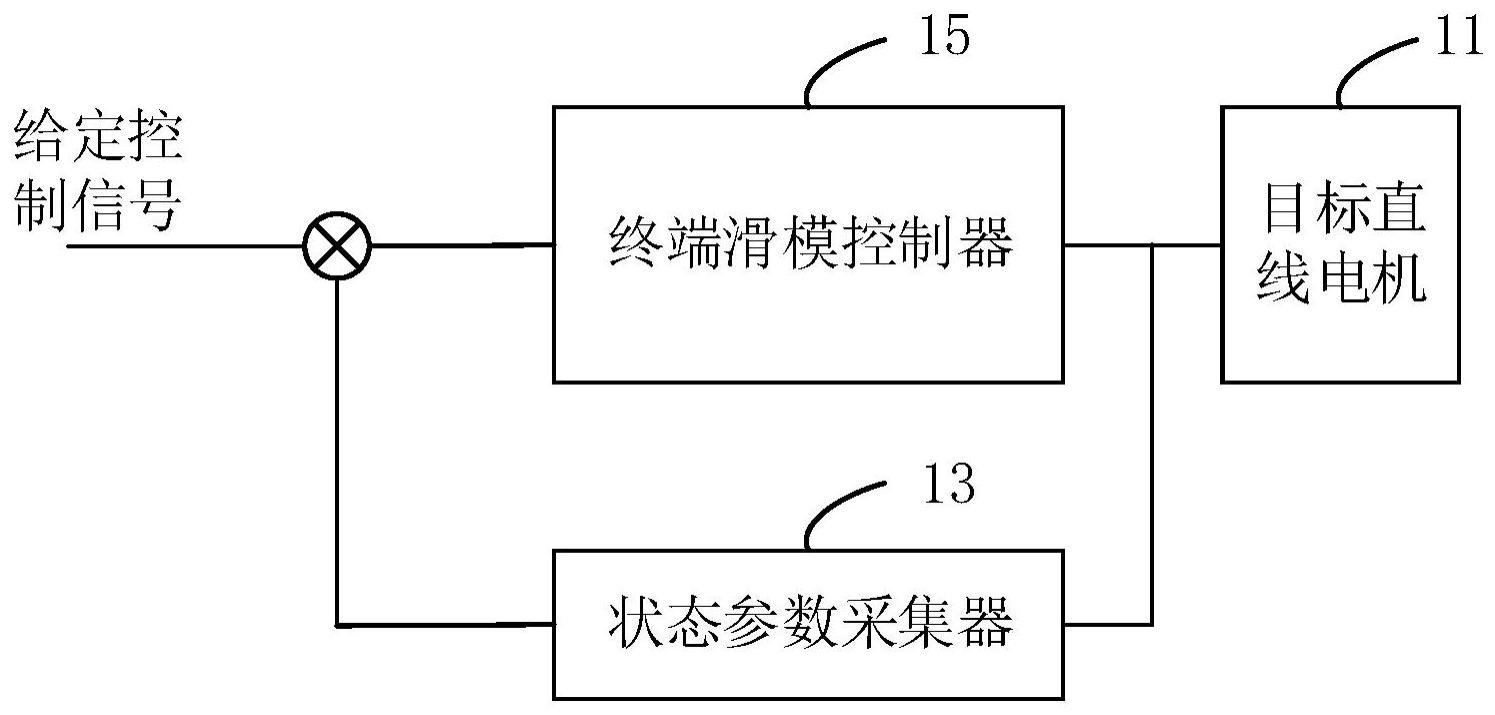
2、一种直线电机控制系统,包括:目标直线电机、状态参数采集器和终端滑模控制器,所述状态参数采集器连接所述目标直线电机,用于采集所述目标直线电机运行过程中的状态反馈信号;所述终端滑模控制器的输入端连接所述状态参数采集器,输出端连接所述目标直线电机,用于获取给定控制信号,以及接收所述状态反馈信号,根据所述给定控制信号和所述状态反馈信号进行离散时间终端滑模分析,得到实际控制信号并发送至所述目标直线电机。
3、上述直线电机控制系统,通过状态参数采集器采集目标直线电机在运行时的状态反馈信号,并将其传输到终端滑模控制器。之后终端滑模控制器结合获取的给定控制信号以及状态反馈信号进行离散时间终端滑模分析,得到当前直线电机实际所需的实际控制信号,最终以实际控制信号控制直线电机运行。通过上述方案,采用离散时间终端滑模分析相关的算法对直线电机的运行进行控制,可有效提高闭环系统的鲁棒性,能够精确、快速地收敛到平衡点,具有较好的控制性能。
4、在其中一个实施例中,所述终端滑模控制器包括依次连接的位置控制器、速度控制器、电流控制器和功率放大器,所述位置控制器、所述速度控制器和所述电流控制器分别连接所述状态参数采集器,所述功率放大器还连接所述目标直线电机。
5、在其中一个实施例中,所述状态参数采集器包括电流采集器、位置采集器和速度采集器,所述电流采集器连接所述电流控制器和所述目标直线电机,所述位置采集器连接所述位置控制器和所述目标直线电机,所述速度采集器连接所述速度控制器和所述目标直线电机。
6、在其中一个实施例中,所述电流采集器为霍尔电流传感器,所述速度采集器为霍尔速度传感器,所述位置采集器为增量式光栅传感器。
7、在其中一个实施例中,所述给定控制信号包括给定位移信号,所述位置控制器用于接收所述给定位移信号,以及所述位置采集器采集的位置反馈信号,并进行离散时间终端滑模分析,得到给定速度信号;所述速度控制器用于接收所述给定速度信号,以及所述速度采集器采集的速度反馈信号,并进行pi分析得到给定电流信号;所述电流控制器用于接收所述给定电流信号,以及所述电流采集器采集的电流反馈信号,并进行pi分析或者pid分析,得到电压控制信号;所述功率放大器用于对所述电压控制信号进行调制得到实际控制信号。
8、在其中一个实施例中,所述位置控制器包括依次连接的第一计算单元、第一逻辑处理单元和第一驱动信号处理单元,所述第一计算单元还与所述状态参数采集器连接,所述第一驱动信号处理单元还与所述速度控制器连接;
9、和/或,在其中一个实施例中,所述速度控制器包括依次连接的第二计算单元、第二逻辑处理单元和第二驱动信号处理单元,所述第二计算单元还与所述状态参数采集器连接,所述第二驱动信号处理单元还与所述电流控制器连接;
10、和/或,在其中一个实施例中,所述电流控制器包括依次连接的第三计算单元、第三逻辑处理单元和第三驱动信号处理单元,所述第三计算单元还与所述状态参数采集器连接,所述第三驱动信号处理单元还与所述功率放大器连接。
11、在其中一个实施例中,所述功率放大器包括依次连接的整流电路、滤波电路和逆变电路,所述整流电路还与所述电流控制器连接,所述逆变电路还与所述目标直线电机连接。
12、在其中一个实施例中,直线电机控制系统还包括干扰补偿控制装置,所述干扰补偿控制装置的输入端连接所述终端滑模控制器的输入端和所述终端滑模控制器的输出端,所述干扰补偿控制装置的输出端连接所述终端滑模控制器的输入端。
13、在其中一个实施例中,所述干扰补偿控制装置包括干扰补偿控制器、第一逆z变换单元和第二逆z变换单元,所述第一逆z变换单元连接所述终端滑模控制器的输入端和所述干扰补偿控制器的输入端,所述第二逆z变换单元连接所述终端滑模控制器的输出端和所述干扰补偿控制器的输入端,所述干扰补偿控制器的输入端还连接所述终端滑模控制器的输入端,所述干扰补偿控制器的输出端连接所述终端滑模控制器的输入端连接。
14、一种直线电机设备,包括上述的直线电机控制系统。
技术特征:
1.一种直线电机控制系统,其特征在于,包括:
2.根据权利要求1所述的直线电机控制系统,其特征在于,所述终端滑模控制器包括依次连接的位置控制器、速度控制器、电流控制器和功率放大器,所述位置控制器、所述速度控制器和所述电流控制器分别连接所述状态参数采集器,所述功率放大器还连接所述目标直线电机。
3.根据权利要求2所述的直线电机控制系统,其特征在于,所述状态参数采集器包括电流采集器、位置采集器和速度采集器,所述电流采集器连接所述电流控制器和所述目标直线电机,所述位置采集器连接所述位置控制器和所述目标直线电机,所述速度采集器连接所述速度控制器和所述目标直线电机。
4.根据权利要求3所述的直线电机控制系统,其特征在于,所述电流采集器为霍尔电流传感器,所述速度采集器为霍尔速度传感器,所述位置采集器为增量式光栅传感器。
5.根据权利要求3所述的直线电机控制系统,其特征在于,所述给定控制信号包括给定位移信号,
6.根据权利要求2所述直线电机控制系统,其特征在于,所述位置控制器包括依次连接的第一计算单元、第一逻辑处理单元和第一驱动信号处理单元,所述第一计算单元还与所述状态参数采集器连接,所述第一驱动信号处理单元还与所述速度控制器连接;
7.根据权利要求2所述的直线电机控制系统,其特征在于,所述功率放大器包括依次连接的整流电路、滤波电路和逆变电路,所述整流电路还与所述电流控制器连接,所述逆变电路还与所述目标直线电机连接。
8.根据权利要求1-7任意一项所述的直线电机控制系统,其特征在于,还包括干扰补偿控制装置,所述干扰补偿控制装置的输入端连接所述终端滑模控制器的输入端和所述终端滑模控制器的输出端,所述干扰补偿控制装置的输出端连接所述终端滑模控制器的输入端。
9.根据权利要求8所述的直线电机控制系统,其特征在于,所述干扰补偿控制装置包括干扰补偿控制器、第一逆z变换单元和第二逆z变换单元,所述第一逆z变换单元连接所述终端滑模控制器的输入端和所述干扰补偿控制器的输入端,所述第二逆z变换单元连接所述终端滑模控制器的输出端和所述干扰补偿控制器的输入端,所述干扰补偿控制器的输入端还连接所述终端滑模控制器的输入端,所述干扰补偿控制器的输出端连接所述终端滑模控制器的输入端连接。
10.一种直线电机设备,其特征在于,包括权利要求1-9任意一项所述的直线电机控制系统。
技术总结
本申请涉及一种直线电机控制系统和直线电机设备,通过状态参数采集器采集目标直线电机在运行时的状态反馈信号,并将其传输到终端滑模控制器。之后终端滑模控制器结合获取的给定控制信号以及状态反馈信号进行离散时间终端滑模分析,得到当前直线电机实际所需的实际控制信号,最终以实际控制信号控制直线电机运行。通过上述方案,采用离散时间终端滑模分析相关的算法对直线电机的运行进行控制,可有效提高闭环系统的鲁棒性,能够精确、快速地收敛到平衡点,具有较好的控制性能。
技术研发人员:江少镇,林杰,卞佳音,张珏,邱烜,麦嘉裕,胡燃,何伟明,林东源,黄万里
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!