电力作业用高空电缆远程无人操控修补装置及其方法与流程
本发明涉及高空电缆修补,具体为电力作业用高空电缆远程无人操控修补装置及其方法。
背景技术:
1、高架电缆,是凭借电杆支撑,架设于电力驱动交通工具行驶轨迹上方半空,在与其接触连接时用以向其直接供电的特殊形式的输电线路。电缆主要靠外面一层包皮绝缘,时间一长,受到腐蚀性气体的腐蚀,绝缘性能逐渐降低,慢慢老化变硬,发脆或脱落。电缆失去绝缘的性能是很危险的,如果两根电缆碰在一起或火线碰到与大地相接的东西,就会发生跑电现象,使局部电线的温度升高,产生火花,造成火灾。
2、公开号为cn110601096b的中国专利公开了一种输变电线路修补装置,包括模具安装座,模具安装座的两侧设置有侧板,侧板的上端设置有顶板,顶板上设置有液压油缸,液压油缸连接有凸模,模具安装座上设置有安装板,安装板上设置有凹模,安装板的纵向中线位置上设置有丝杆槽,丝杆槽内对称设置有丝杆组件。
3、该专利虽然在一定程度上解决了背景技术中通过人工攀爬的方式对电缆做修复的技术问题,但是该专利中塑料管和修补装置之间形成闭环结构,现实中线缆两端与铁附件连接的,无法穿入到塑料管中,安装或者补修时,还是需要人为辅助。
技术实现思路
1、本发明的目的在于提供电力作业用高空电缆远程无人操控修补装置及其方法,通过旋转风叶控制装置基板整体移动位置,并精准定位,利用电机箱带动驱动齿轮旋转,控制第一转轴旋转,夹持臂和夹持块对电缆进行夹持,采用有开口的夹持结构,不需要人为辅助修复,解决了上述背景技术中提出的问题。
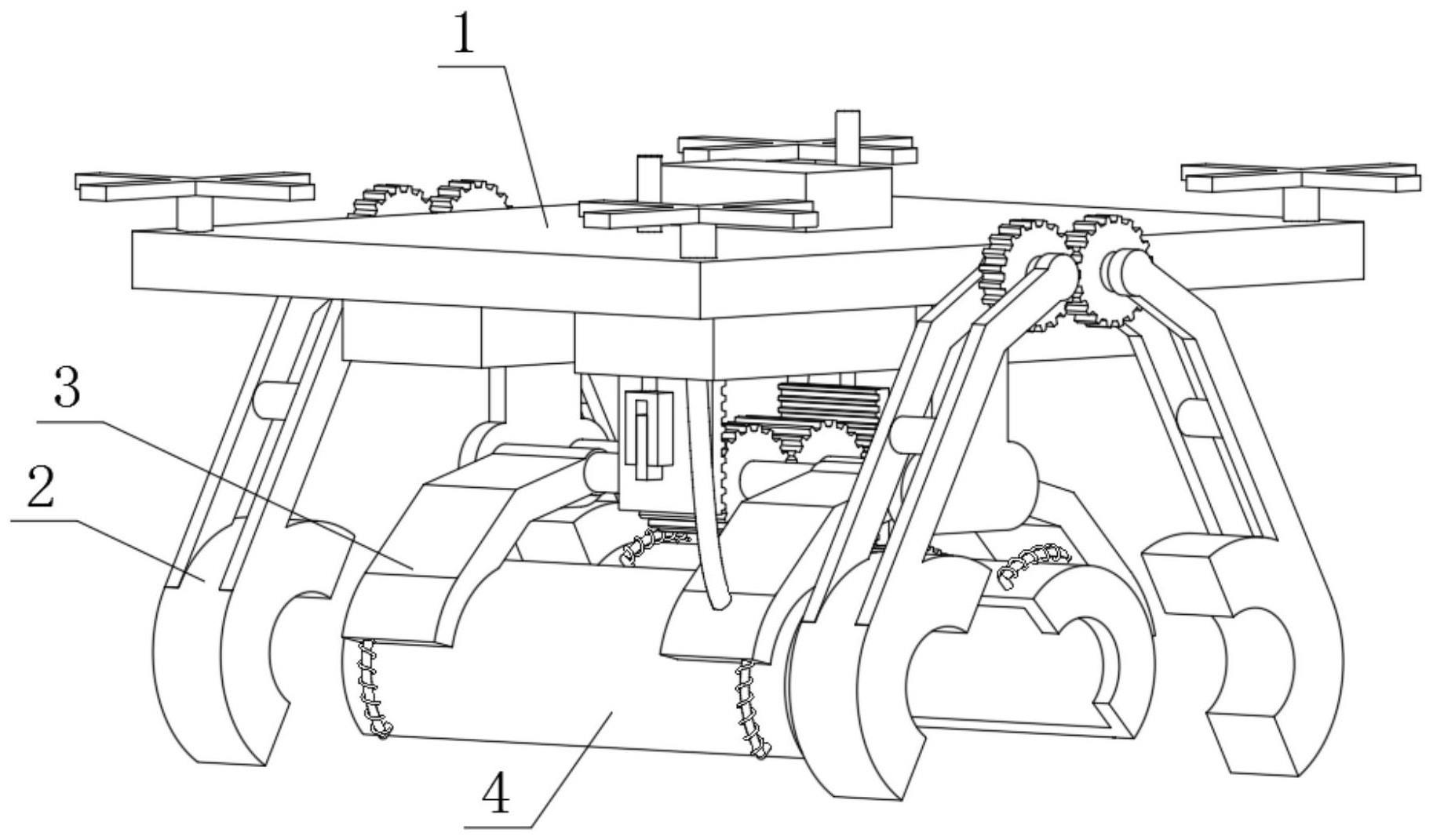
2、为实现上述目的,本发明提供如下技术方案:电力作业用高空电缆远程无人操控修补装置,包括装置基板,所述装置基板上贯穿有定位夹持组件,装置基板的下表面连接有修补组件,所述修补组件包括固定端板、第二旋转轴和夹持板,固定端板的上端与装置基板的下表面固定连接,固定端板上对称设置有第二旋转轴,第二旋转轴的两端对称连接有夹持板,夹持板上活动连接有活动组件。
3、优选的,所述第二旋转轴上均设置有第二齿轮,第二齿轮相互啮合。
4、优选的,所述修补组件还包括第一齿条板和第二齿条板,第一齿条板和第二齿条板的上端分别与固定安装在装置基板上的电动伸缩杆连接,第一齿条板与其中一个第二齿轮啮合。
5、优选的,所述夹持板的内部开设有输料通道,夹持板的侧壁上开设有弧形凹槽,弧形凹槽上开设有第一出料孔,第一出料孔与输料通道连通,输料通道的上端通过管道与设置在装置基板上的材料箱连接,第一出料孔两侧的弧形凹槽上开设有弧形孔。
6、优选的,所述活动组件包括第一夹持槽和第二夹持槽,第一夹持槽和第二夹持槽分别与弧形凹槽贴合,第一夹持槽和第二夹持槽上均开设有第二出料孔。
7、优选的,所述第一夹持槽和第二夹持槽上均设置有对称分布的弧形导杆,弧形导杆贯穿第一出料孔,且弧形导杆置于第一出料孔外部的一端套接有支撑弹簧,支撑弹簧的一端与夹持板连接。
8、优选的,所述第二夹持槽侧壁上设置有外齿,外齿与第二齿条板啮合。
9、优选的,所述定位夹持组件包括第一转轴、夹持臂和夹持块,第一转轴通过轴承与装置基板活动连接,第一转轴的两端通过固定连接的第一齿轮啮合,第一转轴与夹持臂固定连接,夹持臂的下端与夹持块固定连接。
10、优选的,所述装置基板四角位置上设置有旋转风叶,装置基板中心位置上安装有电机箱,第一转轴上设置有驱动齿轮,驱动齿轮与电机箱啮合。
11、本发明要解决的另一技术问题是提供电力作业用高空电缆远程无人操控修补装置的使用方法,包括如下步骤:
12、s1:旋转风叶控制装置基板整体移动位置,并精准定位到电缆破损位置的上方,电机箱带动驱动齿轮旋转,控制第一转轴旋转,将电缆夹持。
13、s2:第一齿条板在对应的电动伸缩杆控制下下移,推动第二齿轮旋转,第二旋转轴控制夹持板相向旋转,夹持板带动对应的第一夹持槽和第二夹持槽将电缆包裹;
14、s3:对材料箱内的橡胶材料加热,通过管道、输料通道和第一出料孔排出熔融状的橡胶材料通过第二出料孔至第一夹持槽和第二夹持槽内;
15、s4:第二齿条板在其对应的电动伸缩杆控制下上下往复移动,带动与之啮合的外齿移动,从而控制第一夹持槽和第二夹持槽共同旋转晃动,进入到第一夹持槽和第二夹持槽内的橡胶材料被摇匀,直至橡胶材料干燥;
16、s5:第一齿条板上移,第一夹持槽和第二夹持槽将电缆放松,第一转轴控制夹持臂与夹持块将电缆放松。
17、与现有技术相比,本发明的有益效果是:
18、1、本发明通过旋转风叶控制装置基板整体移动位置,并精准定位,利用电机箱带动驱动齿轮旋转,控制第一转轴旋转,夹持臂和夹持块对电缆进行夹持,采用有开口的夹持结构,不需要人为辅助修复;
19、2、本发明通过通过第二旋转轴相向旋转,能够控制夹持板相向旋转,带动活动组件将电缆夹持,对电缆受损位置进行包覆,利用管道、输料通道和第一出料孔排出熔融状橡胶材料进入到第一夹持槽和第二夹持槽内,对线缆进行修复;
20、3、本发明修复过程中第二齿条板控制第一夹持槽和第二夹持槽共同旋转晃动,加速材料均匀填充到第一夹持槽和第二夹持槽内,同时避免第一夹持槽和第二夹持槽与材料粘黏,方便拆卸。
技术特征:
1.电力作业用高空电缆远程无人操控修补装置,包括装置基板(1),其特征在于:所述装置基板(1)上贯穿有定位夹持组件(2),装置基板(1)的下表面连接有修补组件(3),所述修补组件(3)包括固定端板(31)、第二旋转轴(32)和夹持板(33),固定端板(31)的上端与装置基板(1)的下表面固定连接,固定端板(31)上对称设置有第二旋转轴(32),第二旋转轴(32)的两端对称连接有夹持板(33),夹持板(33)上活动连接有活动组件(4)。
2.根据权利要求1所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述第二旋转轴(32)上均设置有第二齿轮(321),第二齿轮(321)相互啮合。
3.根据权利要求2所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述修补组件(3)还包括第一齿条板(34)和第二齿条板(35),第一齿条板(34)和第二齿条板(35)的上端分别与固定安装在装置基板(1)上的电动伸缩杆(11)连接,第一齿条板(34)与其中一个第二齿轮(321)啮合。
4.根据权利要求3所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述夹持板(33)的内部开设有输料通道,夹持板(33)的侧壁上开设有弧形凹槽(331),弧形凹槽(331)上开设有第一出料孔(332),第一出料孔(332)与输料通道连通,输料通道的上端通过管道与设置在装置基板(1)上的材料箱(12)连接,第一出料孔(332)两侧的弧形凹槽(331)上开设有弧形孔(333)。
5.根据权利要求4所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述活动组件(4)包括第一夹持槽(41)和第二夹持槽(42),第一夹持槽(41)和第二夹持槽(42)分别与弧形凹槽(331)贴合,第一夹持槽(41)和第二夹持槽(42)上均开设有第二出料孔(421)。
6.根据权利要求5所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述第一夹持槽(41)和第二夹持槽(42)上均设置有对称分布的弧形导杆(411),弧形导杆(411)贯穿第一出料孔(332),且弧形导杆(411)置于第一出料孔(332)外部的一端套接有支撑弹簧(412),支撑弹簧(412)的一端与夹持板(33)连接。
7.根据权利要求6所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述第二夹持槽(42)侧壁上设置有外齿(422),外齿(422)与第二齿条板(35)啮合。
8.根据权利要求7所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述定位夹持组件(2)包括第一转轴(21)、夹持臂(22)和夹持块(23),第一转轴(21)通过轴承与装置基板(1)活动连接,第一转轴(21)的两端通过固定连接的第一齿轮(211)啮合,第一转轴(21)与夹持臂(22)固定连接,夹持臂(22)的下端与夹持块(23)固定连接。
9.根据权利要求8所述的电力作业用高空电缆远程无人操控修补装置,其特征在于:所述装置基板(1)四角位置上设置有旋转风叶(13),装置基板(1)中心位置上安装有电机箱(14),第一转轴(21)上设置有驱动齿轮(212),驱动齿轮(212)与电机箱(14)啮合。
10.一种如权利要求9所述的电力作业用高空电缆远程无人操控修补装置的使用方法,其特征在于,包括以下步骤:
技术总结
本发明公开了电力作业用高空电缆远程无人操控修补装置及其方法,属于高空电缆修补技术领域。本发明的电力作业用高空电缆远程无人操控修补装置,包括装置基板,所述装置基板上贯穿有定位夹持组件,装置基板的下表面连接有修补组件,所述修补组件包括固定端板、第二旋转轴和夹持板。本发明解决了现有安装或者补修时,还是需要人为辅助的技术问题,本发明提出的提出的电力作业用高空电缆远程无人操控修补装置及其方法,通过旋转风叶控制装置基板整体移动位置,并精准定位,利用电机箱带动驱动齿轮旋转,控制第一转轴旋转,夹持臂和夹持块对电缆进行夹持,采用有开口的夹持结构,不需要人为辅助修复。
技术研发人员:孙烨航,孙弘,赵正红
受保护的技术使用者:安徽和光电气设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!