一种基于可变系数的一次调频控制方法及系统与流程
本发明属于调频控制,涉及一种基于可变系数的一次调频控制方法及系统。
背景技术:
1、在海上风电系统中,由于风电机组通过电力电子设备并网,而电力电子设备采用解耦控制方式,因此风电无法参与系统调频,导致系统惯性越来越低,近年来多个地区就出现了因电网惯量不足而导致停电的事故。这类停电事故是由于新能源占比过高,当电力系统频率发生快速跌落时,系统没有足够的惯性导致的,其中,频率变化率(rate of changeof frequency,rocof)和频率最低点(frequency nadir,fn)等都大大超过了系统频率控制措施的响应极限,最终导致全网解列。
2、电力系统转型遇到新的挑战,因此,寻找合适的控制策略使海上风电系统参与系统调频,是能源体系转型之路上亟待解决的问题。
技术实现思路
1、本发明的目的在于解决现有技术中转子减速阶段的欠速脱网问题与转速恢复阶段的sfd的问题,提供一种基于可变系数的一次调频控制方法及系统。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种基于可变系数的一次调频控制方法,包括以下步骤:
4、s1:对初始惯性系数进行整定并确定下垂系数,使初始惯性系数随风速自适应变化;
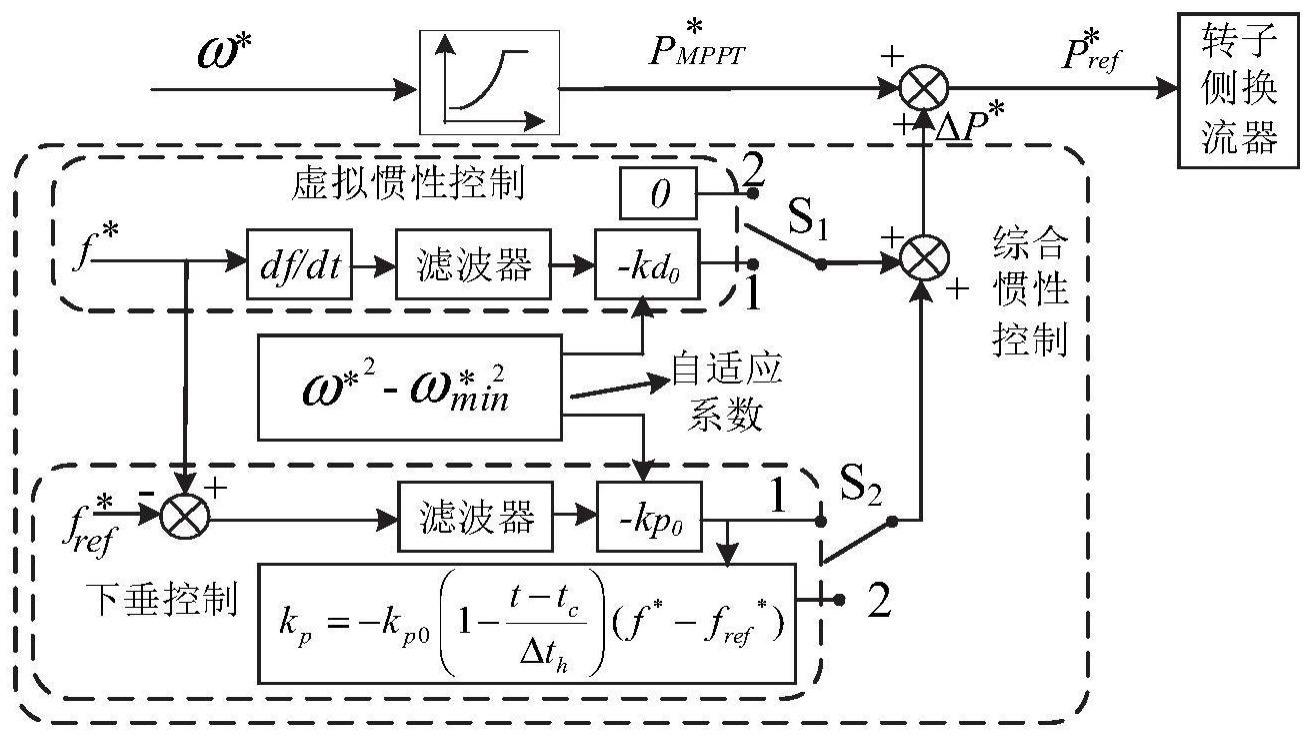
5、s2:在转子减速阶段,根据风机当前释放的转子动能的大小,自适应调整当前的惯性系数和下垂系数,当频率最小时,令当前的惯性系数减小至0,进入转子转速恢复阶段;
6、s3:在转子转速恢复阶段,惯性系数保持为0,下垂系数逐渐减小,直至转子转速恢复阶段结束;
7、s4:当转子转速恢复阶段结束时,风机进入mppt阶段,惯性系数和下垂系数恢复至初始值,风机回到起始运行状态,一次调频结束。
8、本发明的进一步改进在于:
9、所述步骤s1中,所述初始惯性系数通过公式(1)表达:
10、
11、由式(1)可知,当hw与γ一定时,初始虚拟惯性系数kd0与风机转子初始角速度呈正比;当风速不同时,mppt运行模式下风机转子初始角速度也不同,初始虚拟惯性系数kd0随风速自适应变化。
12、所述步骤s1中,所述初始惯性系数通过以下步骤得到:
13、对于同步发电机,惯性时间常数hg一般定义为:
14、
15、式中,j表示机械转动惯量;ωe表示电角速度;ωm表示机械角速度;p表示极对数;eg表示转子动能;sgn表示发电机组额定容量;
16、风机转子转速变小过程中,转子所释放的旋转动能为:
17、
18、式中:jw表示风机转动惯量;jeq表示风机等效转动惯量;ωw0表示风机转子初始角速度;δωw表示风机角速度增量;
19、由式(3)得:
20、
21、令γ=δωw/δωe,称为惯性调节系数,由式(4)可得风机等效惯性时间常数heq为:
22、
23、hw表示风机惯性时间常数;pwn表示风电机组额定容量;
24、若不计系统损耗,风机参与系统调频的转子运动方程式为:
25、
26、表示系统频率变化率;δpg0*表示风机输出功率;δpl0*表示系统负载功率;
27、进一步,由式(6)得到公式(1)。
28、所述步骤s2包括以下步骤:
29、在转子减速阶段,根据风机当前释放的转子动能的大小,自适应调整当前的惯性系数kd和下垂系数kp,通过公式(7)和公式(8)表达:
30、
31、
32、由式(7)和(8)可知,当风机转子转速大时,kd和kp大,风机能够充分释放转子中储存的旋转动能,进行频率支撑;当转子转速变小时,kd、kp的值也变小,释放风机的转子动能减小;
33、当df/dt=0,系统频率偏差达到最大时,系统的惯性响应阶段已结束,风机虚拟惯性控制所附加的有功功率将由正变负,令kd减小为0。
34、所述步骤s3包括以下步骤:
35、在转子转速恢复阶段,下垂系数kp表示为:
36、
37、式中:tc表示风电机组转子转速恢复阶段的起始时间;δth表示转子转速恢复阶段的持续时长。
38、所述步骤s3中,转子转速恢复阶段的持续时长为20s。
39、所述步骤s4包括以下步骤:
40、当转子转速恢复阶段结束时,惯性系数和下垂系数均为0;
41、风机进入mppt阶段时,输出功率随转子转速的增大而增大,直至恢复至初始状态。
42、一种基于可变系数的一次调频控制系统,包括系数给定模块、转子减速阶段模块、转速恢复阶段模块和mppt阶段模块;
43、系数给定模块,用于对初始惯性系数进行整定并确定下垂系数,使初始惯性系数随风速自适应变化;
44、转子减速阶段模块,用于在转子减速阶段,根据风机当前释放的转子动能的大小,自适应调整当前的惯性系数和下垂系数,当频率最小时,进入转子转速恢复阶段,将当前的惯性系数减小至0;
45、转速恢复阶段模块,用于在转子转速恢复阶段,惯性系数保持为0,下垂系数逐渐减小,直至转子转速恢复阶段结束;
46、mppt阶段模块,用于当转子转速恢复阶段结束时,风机进入mppt阶段,惯性系数和下垂系数恢复至初始值,风机回到起始运行状态,一次调频结束。
47、一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明任一项所述方法的步骤。
48、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明任一项所述方法的步骤。
49、与现有技术相比,本发明具有以下有益效果:
50、本发明公开了一种基于可变系数的一次调频控制方法,在一次调频的过程中,针对转子转速的不同阶段,调整惯性系数和下垂系数,在转子减速阶段,自适应调整当前的惯性系数和下垂系数,防止风机出现过度调频而欠速脱网的情况,在转子转速恢复阶段,惯性系数保持为0,下垂系数逐渐减小,能够抑制抑制系统的二次跌落,同时在转子减速阶段的调整更有利于在转子转速恢复阶段中,平滑恢复策略的实现,加快将转子转速恢复至额定值,为系统提供更强的频率支撑,避免了停电和全网解列事故的发生。
技术特征:
1.一种基于可变系数的一次调频控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s1中,所述初始惯性系数通过公式(1)表达:
3.根据权利要求2所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s1中,所述初始惯性系数通过以下步骤得到:
4.根据权利要求1所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s2包括以下步骤:
5.根据权利要求1所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s3包括以下步骤:
6.根据权利要求5所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s3中,转子转速恢复阶段的持续时长为20s。
7.根据权利要求1所述的一种基于可变系数的一次调频控制方法,其特征在于,所述步骤s4包括以下步骤:
8.一种基于可变系数的一次调频控制系统,其特征在于,包括系数给定模块、转子减速阶段模块、转速恢复阶段模块和mppt阶段模块;
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述方法的步骤。
技术总结
本发明公开了一种基于可变系数的一次调频控制方法及系统,包括以下步骤:对初始惯性系数进行整定并确定下垂系数,使初始惯性系数随风速自适应变化;在转子减速阶段,根据风机当前释放的转子动能的大小,自适应调整当前的惯性系数和下垂系数,当频率最小时,减小当前的惯性系数至0,进入转子转速恢复阶段;在转子转速恢复阶段,惯性系数保持为0,下垂系数逐渐减小,直至转子转速恢复阶段结束;当转子转速恢复阶段结束时,风机进入最大功率运行阶段,惯性系数和下垂系数恢复至初始值,风机回到起始运行状态,一次调频结束,以解决现有技术在转子减速阶段的欠速脱网问题与转速恢复阶段的二次跌落问题。
技术研发人员:李华,熊尉辰,李旭东,王若谷,朱超,程子月,马春喆,宋博阳,孟永庆
受保护的技术使用者:国网陕西省电力有限公司电力科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!