一种子母式跨阵列作业光伏清洁机器人及其控制方法与流程
本发明属于光伏,具体是指一种子母式跨阵列作业光伏清洁机器人。
背景技术:
1、对光伏电站来说,尘埃污染是影响发电量的重要因素,不仅会减少组件接受的光辐照量、影响系统效率、降低发电量,局部遮蔽还会引起热斑效应、造成发电量损失、影响组件的寿命,同时造成安全隐患。光伏清扫机器人凭借定时清扫、自由设定运行时间及频次等优势,开始逐步介入光伏电站的智能化建设并开始得到批量应用的机会。
2、现有单排清洁机器人仅能完成一排光伏组件的清洁,不能越排;便携式清洁机器人则需要人工协助才能越排。一般跨排清洁技术虽然可以跨排进行清洁,但需要铺设大量滑行轨道,费时费力费成本,针对以上问题,本申请提出一种子母式跨阵列作业光伏清洁机器人及其控制方法子母式,母车指搬运机器人,子车则指执行清洁任务的光伏清洁机器人,两者配合协调,可实现光伏板的跨阵列作业,两者共同作业适用光伏地面站。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种子母式跨阵列作业光伏清洁机器人,以解决或缓解一般光伏清洁机器人不能跨排清洁、续航能力低的问题,至少提供一种有益的选择。
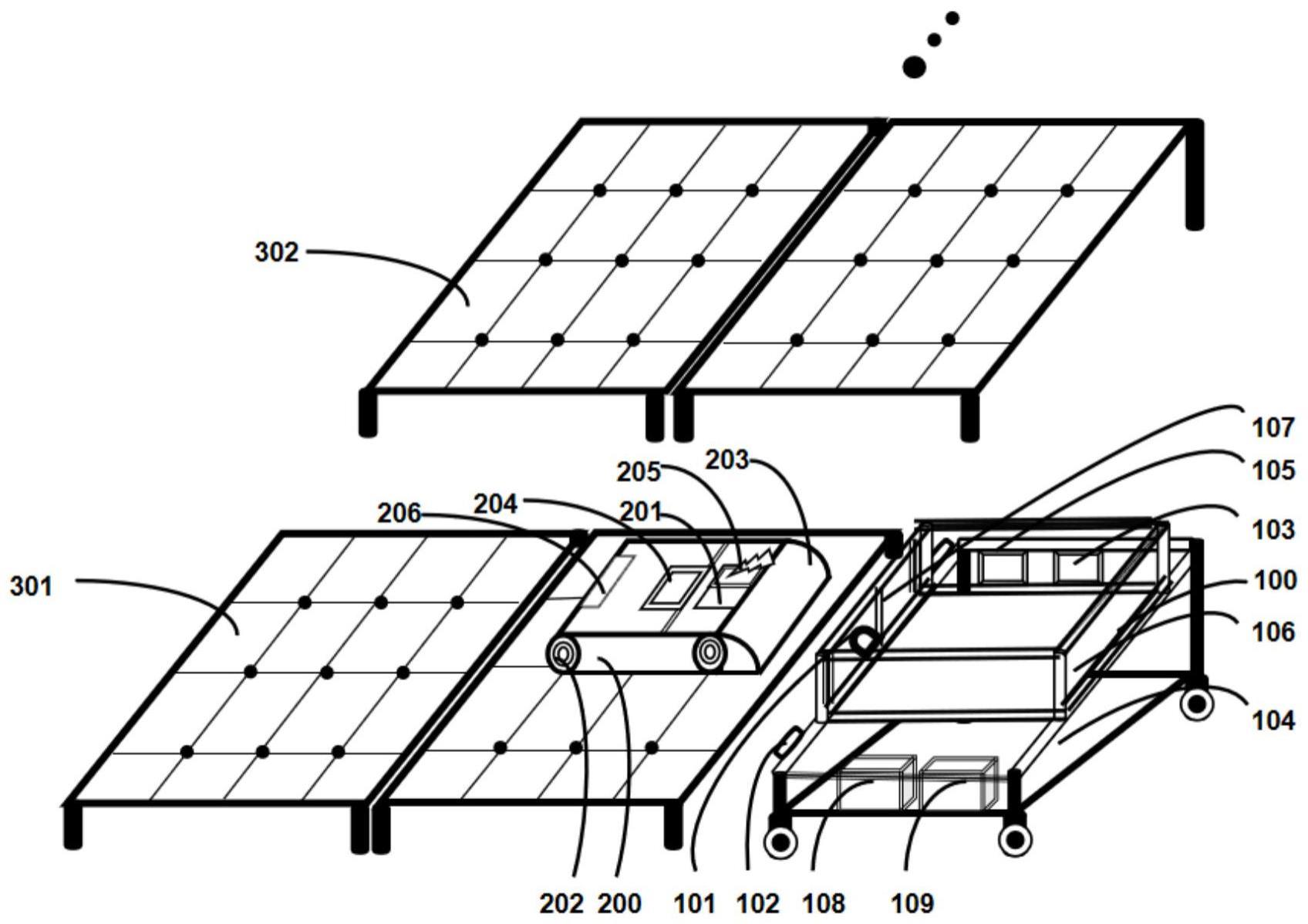
2、本发明实施例的技术方案是这样实现的:一种子母式跨阵列作业光伏清洁机器人,包括搬运机器人和光伏清洁机器人,所述光伏清洁机器人放置在光伏玻璃板上,用于清洁所述光伏玻璃板上的积尘和污秽;所述搬运机器人放置在距离光伏组件边缘第一距离的位置处,用于将所述光伏清洁机器人搬运至相邻阵列,进而协助所述光伏清洁机器人对未清洁或清洁不彻底的光伏板进行清洁。
3、为实现上述目的,本申请实施例第二方面提供了一种子母式跨阵列作业光伏清洁机器人的操控方法,其特征在于,包括以下步骤:
4、搬运机器人搭载光伏清洁机器人向第一光伏阵列边缘逼近,距离所述第一光伏阵列边缘等于或小于第一距离远时,停止运动;
5、控制机构控制开/关门打开,光伏清洁机器人驶离停留补给区,开始对所述第一光伏阵列进行清洁,并将自身位置、水余量和电余量实时发送给留在原地等待的所述搬运机器人;
6、所述光伏清洁机器人清扫完所述第一光伏阵列后,开始向所述停留补给区返回;当光伏清洁机器人运动到离搬运机器人的距离等于或小于所述第一距离时,控制机构控制开/关门打开,光伏清洁机器人进入停留补给区;
7、所述搬运机器人根据所述光伏机器人上传的数据,给所述光伏机器人充电、补水;
8、所述搬运机器人搭载光伏清洁机器人向第二光伏阵列边缘逼近,然后从步骤一开始循环反复,直至所有光伏阵列被清扫干净。
9、作为本发明进一步的方案:搬运机器人包括视觉检测装置、超声波检测装置、导航定位装置、行走机构、控制机构、停留补给区、开/关门、水箱、储能装置,所述视觉检测装置和超声波检测装置用于联合定位搬运机器人与光伏清洁机器人、光伏组件边缘的相对位置;所述导航定位装置用于引导、控制所述行走机构;所述控制机构用于处理所述视觉检测装置、超声波检测装置、导航定位装置上传的数据,根据数据处理结果,所述控制机构,第一方面,控制所述开/关门,允许/禁止所述光伏清洁机器人进/出所述停留补给区;第二方面,控制所述搬运机器人的行走机构,使所述搬运机器人来往于组件阵列之间而不偏离。
10、作为本发明再进一步的方案:所述停留补给区的体积与光伏清洁机器人的体积匹配,所述停留补给区可为光伏清洁机器人充电、补水。
11、作为本发明再进一步的方案:当检测到光伏清洁机器人在停留补给区时,所述视觉检测装置和超声波检测装置,用于检测搬运机器人距离光伏阵列边缘的距离,作为另一种导航方式,用于辅助导航定位装置;当检测到光伏清洁机器人不在停留补给区时,所述视觉检测装置和超声波检测装置,用于检测搬运机器人距离光伏清洁机器人的相对距离,第一相对距离为开/关门的阈值,当所述相对距离小于或等于所述第一相对距离时,开/关门打开并允许所述光伏清洁机器人进入停留补给区。
12、作为本发明再进一步的方案:所述光伏清洁机器人上装有控制机构、行走机构、清扫装置、水箱、信号发射装置和电池组,其中,所述信号发生装置用于将所述水箱中的水余量以及电池组的电余量组成数据包发送给搬运机器人的控制装置,所述搬运机器人的控制装置通过解析数据包内容,再控制停留补给区给光伏清洁机器人充电/补水。
13、一种子母式跨阵列作业光伏清洁机器人的操控方法,包括以下步骤:
14、步骤一、搬运机器人搭载光伏清洁机器人向第一光伏阵列边缘逼近,距离所述第一光伏阵列边缘等于或小于第一距离远时,停止运动;
15、步骤二、控制机构控制开/关门打开,光伏清洁机器人驶离停留补给区,开始对所述第一光伏阵列进行清洁,并将自身位置、水余量和电余量实时发送给留在原地等待的所述搬运机器人;
16、步骤三、所述光伏清洁机器人清扫完所述第一光伏阵列后,开始向所述停留补给区返回;当光伏清洁机器人运动到离搬运机器人的距离等于或小于所述第一距离时,控制机构控制开/关门打开,光伏清洁机器人进入停留补给区;
17、步骤四、所述搬运机器人根据所述光伏机器人上传的数据,给所述光伏机器人充电、补水;
18、步骤五、所述搬运机器人搭载光伏清洁机器人向第二光伏阵列边缘逼近,然后从步骤一开始循环反复,直至所有光伏阵列被清扫干净。
19、作为本发明再进一步的方案:采用视觉检测装置和超声波检测装置联合定位搬运机器人与光伏清洁机器人、光伏组件边缘的相对位置,当检测到光伏清洁机器人在停留补给区时,所述视觉检测装置和超声波检测装置,用于检测搬运机器人距离光伏阵列边缘的距离,作为另一种导航方式,辅助搬运机器人进行导航定位;当检测到光伏清洁机器人不在停留补给区时,所述视觉检测装置和超声波检测装置,用于检测搬运机器人距离光伏清洁机器人的相对距离,当所述相对距离小于或等于所述第一相对距离时,开/关门打开允许所述光伏清洁机器人进入停留补给区,所述第一相对距离为开/关门的阈值。
20、作为本发明再进一步的方案:光伏清洁机器人装备的信号发生装置将所述光伏清洁机器人水箱中的水余量以及电池余量组成数据包发送给搬运机器人的控制装置,所述搬运机器人的控制装置通过解析数据包内容,控制停留补给区给光伏清洁机器人充电/补水。
21、本发明实施例由于采用以上技术方案,其具有以下优点:
22、本方案有效解决了现有光伏清洁机器人不能跨阵列清洁的缺点,既实现了无人化清洁,又提高了清洁效率,可以快速而准确地清洁光伏板表面的污垢和灰尘,相比传统的人工清洁方式,机器人能够大幅提高清洁效率,节省时间和人力成本。
23、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种子母式跨阵列作业光伏清洁机器人,其特征在于:包括搬运机器人(100)和光伏清洁机器人(200),所述光伏清洁机器人(200)为子车设于光伏玻璃板上,所述搬运机器人(100)为母车设于在距离光伏组件边缘第一距离的位置处,所述光伏清洁机器人(200)搬设于相邻阵列;
2.根据权利要求1所述的一种子母式跨阵列作业光伏清洁机器人,其特征在于:所述导航定位装置(103)引导、控制所述行走机构(104),所述控制机构(105)用于处理所述视觉检测装置(101)、超声波检测装置(102)、导航定位装置(103)上传的数据,所述控制机构(105)控制所述开/关门(107),允许/禁止所述光伏清洁机器人(200)进/出所述停留补给区(106);且/或,
3.根据权利要求2所述的一种子母式跨阵列作业光伏清洁机器人,其特征在于:所述停留补给区(106)的体积与光伏清洁机器人(100)的体积相匹配,所述停留补给区(106)可为光伏清洁机器人(100)充电、补水。
4.根据权利要求3所述的一种子母式跨阵列作业光伏清洁机器人,其特征在于:所述的视觉检测装置(101)和超声波检测装置(102)检测到光伏清洁机器人(100)在停留补给区(106),所述视觉检测装置(101)和超声波检测装置(102),用于检测搬运机器人(100)距离光伏阵列边缘的距离,作为另一种导航方式,辅助导航定位装置(103);
5.一种子母式跨阵列作业光伏清洁机器人的操控方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种子母式跨阵列作业光伏清洁机器人的操控方法,其特征在于:在步骤一至四过程中,采用视觉检测装置和超声波检测装置联合定位搬运机器人与光伏清洁机器人、光伏组件边缘的相对位置,当检测到光伏清洁机器人在停留补给区时,所述视觉检测装置和超声波检测装置,用于检测搬运机器人距离光伏阵列边缘的距离,作为另一种导航方式,辅助搬运机器人进行导航定位;
7.根据权利要求6所述的一种子母式跨阵列作业光伏清洁机器人,其特征在于,在步骤四之前,还包括:光伏清洁机器人装备的信号发生装置将所述光伏清洁机器人水箱中的水余量以及电池余量组成数据包发送给搬运机器人的控制装置,所述搬运机器人的控制装置通过解析数据包内容,控制停留补给区给光伏清洁机器人充电/补水。
技术总结
本发明属于光伏技术领域,具体是指一种子母式跨阵列作业光伏清洁机器人,包括搬运机器人和光伏清洁机器人,其中,光伏清洁机器人为子车,放置在光伏玻璃板上,用于清洁光伏玻璃板上的积尘和污秽;搬运机器人为母车,放置在距离光伏组件边缘第一距离的位置处,用于将所述光伏清洁机器人搬运至相邻阵列,进而协助所述光伏清洁机器人对未清洁或清洁不彻底的光伏板进行清洁;本发明一种子母式跨阵列作业光伏清洁机器人的操控方法,有效解决了现有光伏清洁机器人不能跨阵列清洁的缺点,既实现了无人化清洁,又提高了清洁效率。
技术研发人员:常兴智,高学平,胡晓辉,杨保宁,徐志瑞,郑果果,刘伟,史斌,王统,刘彦春,龙海超
受保护的技术使用者:宁夏隆基宁光仪表股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!