一种运行姿态可调的扭转式光伏清扫机器人的制作方法
本发明涉及光伏清扫设备领域,尤其涉及到一种运行姿态可调的扭转式光伏清扫机器人。
背景技术:
1、在光伏电站中,通常会在同一排的不同光伏板之间设置桥架搭接,为清扫机器人创造通行条件,节省清扫机器人的使用数量,但不同阵列的光伏板之间存在角度偏差、水平偏差和前后错差,例如采用跟踪式支架的光伏电站,不同的跟踪式支架由于驱动不同,安装过程中会存在前后错差、水平偏差,跟踪支架的两端与驱动处也存在一定角度的扭转,则使得两个光伏支架阵列间的连接桥架,呈现出一端上坡一端下坡的状态,清扫机器人通过桥架时,较易出现卡死或者脱离光伏板边框的情况,严重影响清扫工作地顺利实施。
2、现有的光伏清扫机器人通常是使用扭矩管将上端组件的第一主动力轮组和下端组件的第二主动力轮组连接在一起,然后通过电机驱动扭矩管旋转,以进行动力传输,当清扫机器人遇到一端为上坡、另一端为下坡的桥架状态时,扭矩管会产生扭转,保持清扫机器人的着轨状态,但扭矩管提供的扭矩有限,且会相互牵扯上端组件和下端组件,因此不能适应起伏幅度比较大的桥架,且通过扭矩管进行动力传输,第一主动力轮组和第二主动力轮组的转速会同步,因此不能够通过分别调整转速来进行运行姿态调整,急需改进。
技术实现思路
1、本发明解决的问题是如何提供一种运行姿态可调的扭转式光伏清扫机器人,能够扭转适应起伏比较大的光伏板以及桥架,且能够进行运行姿态调整。
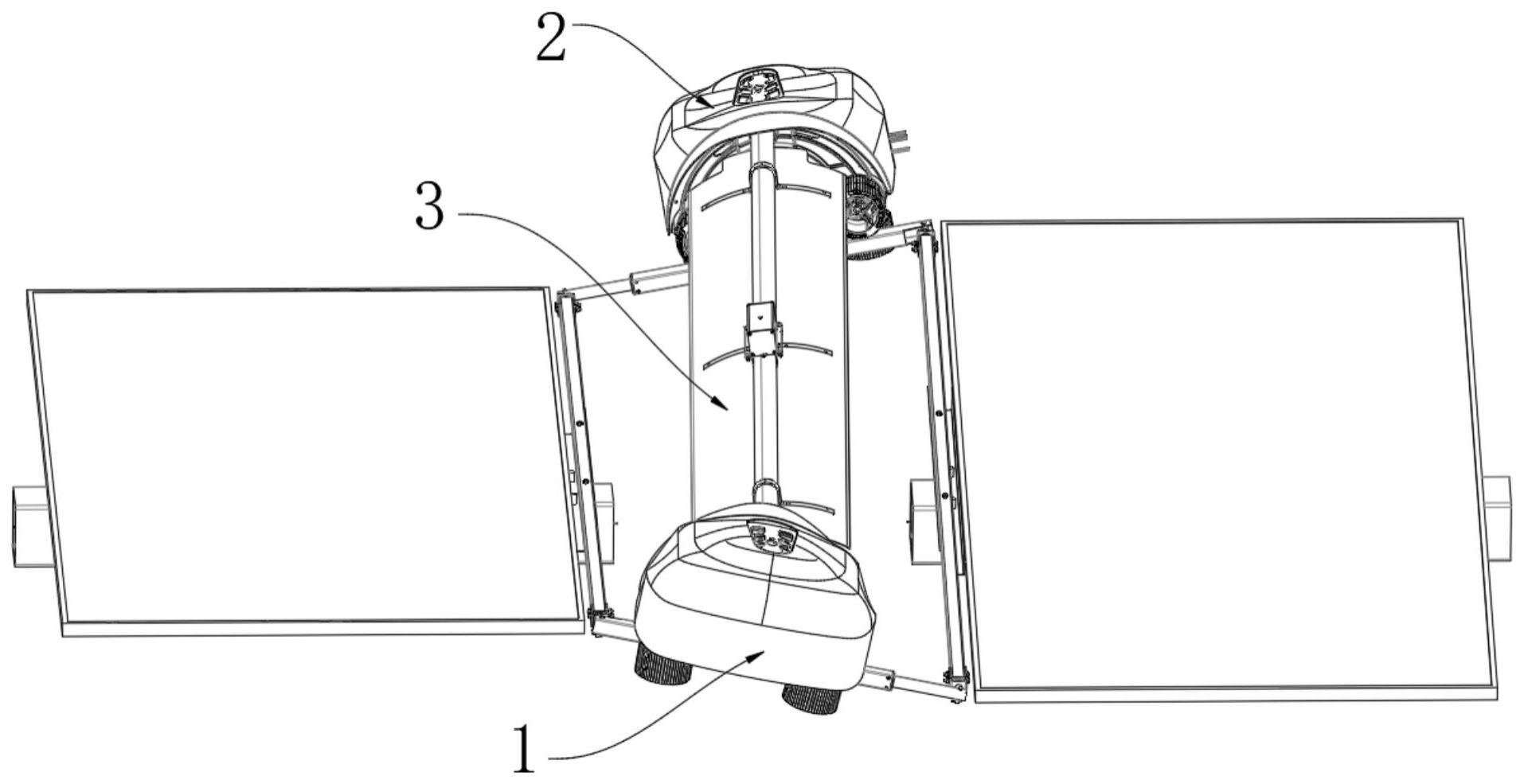
2、为解决上述问题,本发明提供一种运行姿态可调的扭转式光伏清扫机器人,包括上端组件和下端组件,所述上端组件包括第一行走轮组,以及驱动所述第一行走轮组转动的第一电机,所述下端组件包括第二行走轮组,以及驱动所述第二行走轮组转动的第二电机,所述第一行走轮组和所述第二行走轮组分别在光伏板边框的两端上行走,所述上端组件和下端组件之间还转动设置有毛刷辊,所述毛刷辊的一端与所述第一电机的工作端相连。
3、可选地,所述上端组件还包括上端板结构,所述第一行走轮组包括呈夹角设置在所述上端板结构上的第一主行走轮组和第一辅行走轮组,所述第一主行走轮组和第一辅行走轮组分别连接设置有转轴,各所述转轴转动贯穿设置在所述上端板结构内,所述第一电机的工作端穿射所述上端板结构设置,在所述上端板结构内设置有齿轮结构,所述齿轮结构套设在所述第一电机的工作端上以及各所述转轴上,以啮合带动各所述转轴进行转动。
4、可选地,所述齿轮结构包括圆柱齿轮组,所述圆柱齿轮组包括套设在所述第一电机工作端上的主动齿轮,以及套设在所述第一主动力轮组的转轴上的从动齿轮,且所述主动齿轮和所述从动齿轮之间设置有多个联动齿轮,以相互啮合转动。
5、可选地,所述齿轮结构还包括第一圆锥齿轮组,所述第一圆锥齿轮组包括套设在所述第一主动力轮组的转轴上的主圆锥齿轮以及设置在所述第一辅动力轮组转轴端头上的从圆锥齿轮,所述主圆锥齿轮和所述从圆锥齿轮啮合转动。
6、可选地,所述下端组件还包括下端板,所述第二行走轮组包括呈夹角设置在所述下端板上的第二主行走轮组和第二辅行走轮组,所述第二电机设置在所述下端板的一侧,所述第二电机的工作端上贯穿设置有旋转轴,所述旋转轴的两端上以及所述第二主行走轮组的转轴上配合设置有第二圆锥齿轮组,以带动所述第二主行走轮组进行转动。
7、可选地,所述旋转轴包括轴套,所述轴套的两端分别插置有轴芯,所述第二电机的输出端套设在其中一端的轴芯上,以通过轴套带动两端的轴芯同轴转动,所述轴套的两端上开设有开孔,以便于分别穿射连接销连接各所述轴芯。
8、可选地,还包括控制装置,所述控制装置包括陀螺仪传感器以及控制单元,所述陀螺仪传感器设置在所述下端组件的电控箱内,所述控制单元根据所述陀螺仪传感器采集的信息控制所述第一电机和所述第二电机的转速。
9、可选地,所述第一电机的工作端穿过所述上端板结构后与所述毛刷辊相连,以驱动所述毛刷辊转动清扫光伏板,所述毛刷辊的另一端通过万向节转动设置在所述下端板上。
10、可选地,还包括安装罩,所述上端板结构和所述下端板呈半圆形结构,所述安装罩分别沿着所述上端板结构和所述下端板的弧形边盖设,以进行防护。
11、可选地,还包括盖板,所述上端板结构和所述下端板之间还连接设置有连接轴,所述连接轴位于所述毛刷辊的上方,所述盖板固定于所述连接轴上,且位于所述连接轴和毛刷辊之间。
12、相对于现有技术的有益效果,本发明中所述清扫机器人包括上端组件和下端组件,所述上端组件包括第一行走轮组,所述下端组件包括第二行走轮组,所述第一行走轮组和所述第二行走轮组分别在所述光伏板边框的两端上进行行走,所述第一行走轮组和所述第二行走轮组分别设置有第一电机和第二电机进行单独驱动,不设置扭矩管进行连接,从而能够进行最大程度扭转,能够在起伏比较大的光伏板以及桥架行走,且由两个电机单独驱动使得所述第一行走轮组和所述第二行走轮组的转速可分别调节,由于桥架一端下坡,一端上坡,下坡端的清扫机器人行进速度会快于上坡端,当清扫机器人行走到光伏板的位置时,能够通过分别调整第一行走轮组和第二行走轮组的转速,实现运行姿态的调整,及时进行纠偏,防止脱轨,所述毛刷辊转动设置在所述上端组件和所述下端组件之间,且一端与所述第一电机的工作端相连,从而所述毛刷辊能够进行转动清扫所述光伏板。
技术特征:
1.一种运行姿态可调的扭转式光伏清扫机器人,其特征在于,包括上端组件(1)和下端组件(2),所述上端组件(1)包括第一行走轮组,以及驱动所述第一行走轮组转动的第一电机(120),所述下端组件(2)包括第二行走轮组,以及驱动所述第二行走轮组转动的第二电机(24),所述第一行走轮组和所述第二行走轮组分别在光伏板边框的两端上行走,所述上端组件(1)和下端组件(2)之间还转动设置有毛刷辊(5),所述毛刷辊(5)的一端与所述第一电机(120)的工作端相连。
2.根据权利要求1所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述上端组件(1)还包括上端板结构(11),所述第一行走轮组包括呈夹角设置在所述上端板结构(11)上的第一主行走轮组(12)和第一辅行走轮组(13),所述第一主行走轮组(12)和第一辅行走轮组(13)分别连接设置有转轴,各所述转轴转动贯穿设置在所述上端板结构(11)内,所述第一电机(120)的工作端穿射所述上端板结构(11)设置,在所述上端板结构(11)内设置有齿轮结构,所述齿轮结构套设在所述第一电机(120)的工作端上以及各所述转轴上,以啮合带动各所述转轴进行转动。
3.根据权利要求2所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述齿轮结构包括圆柱齿轮组,所述圆柱齿轮组包括套设在所述第一电机(120)工作端上的主动齿轮(16),以及套设在所述第一主动力轮组的转轴上的从动齿轮(18),且所述主动齿轮(16)和所述从动齿轮(18)之间设置有多个联动齿轮(17),以相互啮合转动。
4.根据权利要求3所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述齿轮结构还包括第一圆锥齿轮组(19),所述第一圆锥齿轮组(19)包括套设在所述第一主动力轮组的转轴上的主圆锥齿轮以及设置在所述第一辅动力轮组转轴端头上的从圆锥齿轮,所述主圆锥齿轮和所述从圆锥齿轮啮合转动。
5.根据权利要求2所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述下端组件(2)还包括下端板(21),所述第二行走轮组包括呈夹角设置在所述下端板(21)上的第二主行走轮组(22)和第二辅行走轮组(23),所述第二电机(24)设置在所述下端板(21)的一侧,所述第二电机(24)的工作端上贯穿设置有旋转轴(25),所述旋转轴(25)的两端上以及所述第二主行走轮组(22)的转轴上配合设置有第二圆锥齿轮组(27),以带动所述第二主行走轮组(22)进行转动。
6.根据权利要求5所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述旋转轴(25)包括轴套(251),所述轴套(251)的两端分别插置有轴芯(252),所述第二电机(24)的输出端套设在其中一端的轴芯(252)上,以通过轴套(251)带动两端的轴芯(252)同轴转动,所述轴套(251)的两端上开设有开孔(253),以便于分别穿射连接销连接各所述轴芯(252)。
7.根据权利要求1所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,还包括控制装置,所述控制装置包括陀螺仪传感器以及控制单元,所述陀螺仪传感器设置在所述下端组件(2)的电控箱内(26),所述控制单元根据所述陀螺仪传感器采集的信息控制所述第一电机(120)和所述第二电机(24)的转速。
8.根据权利要求5所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,所述第一电机(120)的工作端穿过所述上端板结构(11)后与所述毛刷辊(5)相连,以驱动所述毛刷辊(5)转动清扫光伏板,所述毛刷辊(5)的另一端通过万向节转动设置在所述下端板(21)上。
9.根据权利要求5所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,还包括安装罩(15),所述上端板结构(11)和所述下端板(21)呈半圆形结构,所述安装罩(15)分别沿着所述上端板结构(11)和所述下端板(21)的弧形边盖设,以进行防护。
10.根据权利要求5所述的运行姿态可调的扭转式光伏清扫机器人,其特征在于,还包括盖板(3),所述上端板结构(11)和所述下端板(21)之间还连接设置有连接轴(4),所述连接轴(4)位于所述毛刷辊(5)的上方,所述盖板(3)固定于所述连接轴(4)上,且位于所述连接轴(4)和毛刷辊(5)之间。
技术总结
本发明涉及光伏清扫设备领域,并提供一种运行姿态可调的扭转式光伏清扫机器人,包括上端组件和下端组件,所述上端组件包括第一行走轮组,以及驱动所述第一行走轮组转动的第一电机,所述下端组件包括第二行走轮组,以及驱动所述第二行走轮组转动的第二电机,所述第一行走轮组和所述第二行走轮组分别在光伏板边框的两端上行走,所述上端组件和下端组件之间还转动设置有毛刷辊,所述毛刷辊的一端与所述第一电机的工作端相连;本发明能够扭转适应起伏比较大的光伏板以及桥架,且能够进行运行姿态调整。
技术研发人员:严海林,张杏华,李田蓥,时永佳,金佳楠
受保护的技术使用者:廊坊思拓新能源科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!