永磁同步电机的控制方法、系统、设备及存储介质与流程
本发明涉及电机控制领域,特别是涉及永磁同步电机的控制方法、系统、设备及存储介质。
背景技术:
1、永磁同步电机因具有高功率密度以及高效率的优势而被广泛应用于制造以及工业生产等领域中。当永磁同步电机所带负载变化时永磁同步电机的转速响应会受到影响,从而导致永磁同步电机运行不稳定,因此在很多应用场景中都需要一种能让永磁同步电机保持良好的转速跟随性,使得永磁同步电机在负载变化的情况下也能快速将转速恢复正常的方案。
技术实现思路
1、本发明的目的是提供一种永磁同步电机的控制方法、系统、设备及存储介质,通过将负载转矩观测器输出的负载转矩估计值前馈至电流环,提高永磁同步电机的抗负载扰动性,提高转速跟随性能。
2、为解决上述技术问题,本发明提供了一种永磁同步电机的控制方法,包括:
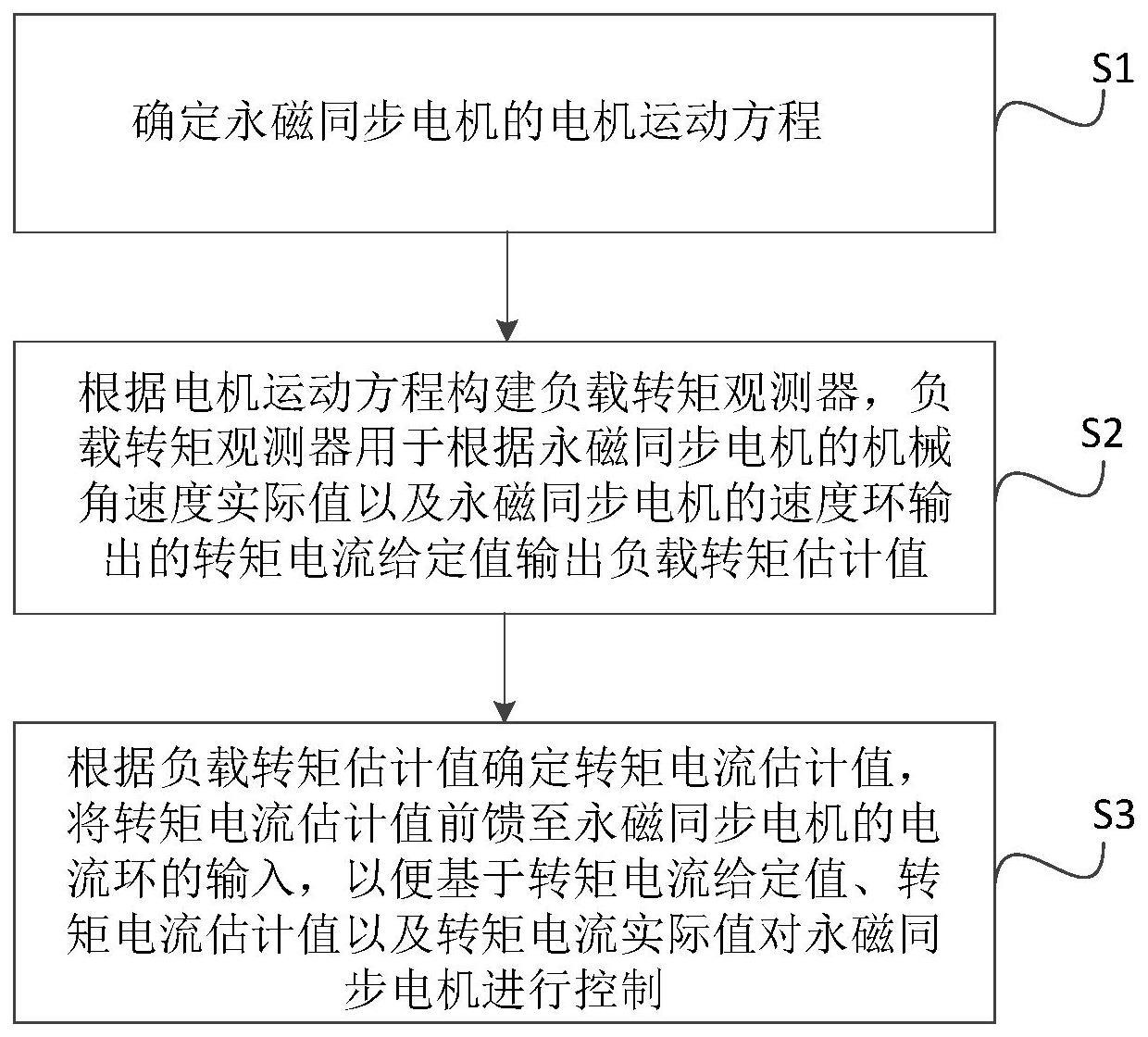
3、确定永磁同步电机的电机运动方程;
4、根据所述电机运动方程构建负载转矩观测器,所述负载转矩观测器用于根据所述永磁同步电机的机械角速度实际值以及所述永磁同步电机的速度环输出的转矩电流给定值输出负载转矩估计值;
5、根据所述负载转矩估计值确定转矩电流估计值,将所述转矩电流估计值前馈至所述永磁同步电机的电流环的输入,以便基于所述转矩电流给定值、所述转矩电流估计值以及转矩电流实际值对所述永磁同步电机进行控制。
6、优选的,根据所述电机运动方程构建负载转矩观测器,包括:
7、根据所述电机运动方程构建等效为一阶惯性系统的负载转矩观测器。
8、优选的,所述永磁同步电机的电机运动方程为:
9、
10、其中,jm为电机转动惯量,ωm为所述机械角速度实际值,bm为阻尼系数,tl为负载转矩实际值,te为输出转矩实际值。
11、优选的,在根据所述电机运动方程构建负载转矩观测器之前,还包括:
12、将所述电机运动方程进行简化,将简化后的电机运动方程作为新的电机运动方程,并进入根据所述电机运动方程构建负载转矩观测器的步骤;
13、其中,所述简化后的电机运动方程为
14、优选的,根据所述电机运动方程构建的负载转矩观测器为:
15、
16、其中,为机械角速度估计值,x为中间参数,km为比例系数,为负载转矩估计值,s为传递函数中表示微分环节的复变量。
17、优选的,确定所述负载转矩观测器的比例系数,包括:
18、确定所述负载转矩观测器的带宽;
19、根据所述带宽和所述电机转动惯量确定所述比例系数。
20、优选的,根据所述负载转矩估计值确定转矩电流估计值,将所述转矩电流估计值前馈至所述永磁同步电机的电流环的输入,以便基于所述转矩电流给定值、所述转矩电流估计值以及转矩电流实际值对所述永磁同步电机进行控制,包括:
21、根据所述负载转矩估计值实时确定最新的转矩电流估计值,并将所述最新的转矩电流估计值前馈至所述永磁同步电机的电流环的输入,以便基于所述转矩电流给定值、所述最新的转矩电流估计值以及所述转矩电流实际值对所述永磁同步电机进行控制。
22、为解决上述技术问题,本申请还提供了一种永磁同步电机的控制系统,包括:
23、电机运动方程确定单元,用于确定永磁同步电机的电机运动方程;
24、负载转矩估计值确定单元,用于根据所述电机运动方程构建负载转矩观测器,所述负载转矩观测器用于根据所述永磁同步电机的机械角速度实际值以及所述永磁同步电机的速度环输出的转矩电流给定值输出负载转矩估计值;
25、前馈控制单元,用于根据所述负载转矩估计值确定转矩电流估计值,将所述转矩电流估计值前馈至所述永磁同步电机的电流环的输入,以便基于所述转矩电流给定值、所述转矩电流估计值以及转矩电流实际值对所述永磁同步电机进行控制。
26、为解决上述技术问题,本申请还提供了一种永磁同步电机的控制设备,包括:
27、存储器,用于存储计算机程序;
28、处理器,用于执行所述计算机程序时实现上述任一永磁同步电机的控制方法的步骤。
29、为解决上述技术问题,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一永磁同步电机的控制方法的步骤。
30、本发明的有益效果在于提供了一种永磁同步电机控制方法、系统、设备及存储介质,首先确定永磁同步电机的电机运动方程,然后根据电机运动方程构建负载转矩观测器,负载转矩观测器用于根据永磁同步电机的机械角速度实际值以及永磁同步电机的速度环输出的转矩电流给定值输出负载转矩估计值。根据负载转矩估计值确定转矩电流估计值,将转矩电流估计值前馈至永磁同步电机的电流环的输入,以便基于转矩电流给定值、转矩电流估计值以及转矩电流实际值对永磁同步电机进行控制。通过将负载转矩观测器输出的负载转矩估计值对应的转矩电流估计值前馈至电流环,使得永磁同步电机在运行的过程中,根据转矩电流估计值调整永磁同步电机的转速,从而提高永磁同步电机的抗负载扰动性,进而提高了永磁同步电机的转速跟随性能。
技术特征:
1.一种永磁同步电机的控制方法,其特征在于,包括:
2.如权利要求1所述的永磁同步电机的控制方法,其特征在于,所述根据所述电机运动方程构建负载转矩观测器,包括:
3.如权利要求2所述的永磁同步电机的控制方法,其特征在于,所述永磁同步电机的电机运动方程为:
4.如权利要求3所述的永磁同步电机的控制方法,其特征在于,在所述根据所述电机运动方程构建负载转矩观测器之前,还包括:
5.如权利要求4所述的永磁同步电机的控制方法,其特征在于,根据所述电机运动方程构建的负载转矩观测器为:
6.如权利要求5所述的永磁同步电机的控制方法,其特征在于,所述方法还包括:
7.如权利要求1至6任一项所述的永磁同步电机的控制方法,其特征在于,所述根据所述负载转矩估计值确定转矩电流估计值,将所述转矩电流估计值前馈至所述永磁同步电机的电流环的输入,以便基于所述转矩电流给定值、所述转矩电流估计值以及转矩电流实际值对所述永磁同步电机进行控制,包括:
8.一种永磁同步电机的控制系统,其特征在于,包括:
9.一种永磁同步电机的控制设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述永磁同步电机的控制方法的步骤。
技术总结
本发明公开了一种永磁同步电机的控制方法、系统、设备及存储介质,涉及电机控制领域,该方法包括:首先确定永磁同步电机的电机运动方程,然后根据电机运动方程构建负载转矩观测器,负载转矩观测器用于根据永磁同步电机的机械角速度实际值以及永磁同步电机的速度环输出的转矩电流给定值输出负载转矩估计值。根据负载转矩估计值确定转矩电流估计值,将转矩电流估计值前馈至永磁同步电机的电流环的输入,以便基于转矩电流给定值、转矩电流估计值以及转矩电流实际值对永磁同步电机进行控制。通过将负载转矩观测器输出的转矩电流估计值前馈至电流环,根据转矩电流估计值调整永磁同步电机的转速,提高永磁同步电机的抗负载扰动性和转速跟随性能。
技术研发人员:贺勤,沈文,田峰,宋茂林
受保护的技术使用者:深圳市英威腾电气股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!