一种混合结构的双绕组电机电流均衡控制方法
本发明属于汽车转向系统,具体涉及一种混合结构的双绕组电机电流均衡控制方法。
背景技术:
1、现有汽车线控转向系统一般采用单绕组的三相永磁同步电机作为执行电机,当绕组出现故障时将导致整个转向电机失效,严重降低了线控转向系统的可靠性。双绕组电机采用两套三相绕组组合而成,两套绕组之间电气独立,一个绕组发生故障不影响另一个绕组的正常工作,具有良好的容错性能和可靠性。
2、但是,双绕组电机两套绕组之间的电阻、电感值差异导致的电流不均衡或两套逆变器之间的差异导致的电源电压不均衡,往往会造成两套绕组之间的电流不均衡,进而导致双绕组电机发热不均匀,可能会破坏绕组的绝缘结构,电流较大的绕组还有过载烧毁的风险。中国发明专利申请号为cn201711054340.2名称为“一种基于广义对称分量理论的多相电机电流均衡控制方法”,其公开了将多相电机拆解为n个对称m相系统,并用pi控制算法进行电流均衡控制,但其未考虑双绕组电机参数不确定性和外界扰动对电流均衡控制的影响;中国发明专利申请号为cn202111353115.5名称为“一种基于双dq坐标变换结构的双绕组电机电流均衡控制方法”,设计基于rbf神经网络的滑模控制器,并将滑模控制器的输出与pi电流控制器的输出叠加后共同作用在双绕组电机上,实现双绕组转向电机两套绕组之间的电流均衡,但该方法建立在双dq坐标变换结构下,存在两套绕组之间的耦合问题。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种混合结构的双绕组电机电流均衡控制方法,以解决现有技术中未考虑两套绕组之间耦合影响的双绕组电机电流均衡控制的问题;本发明的控制方法能够综合矢量空间解耦坐标变换(vector spacedecouping,vsd)和双dq坐标变换的优势,使两套绕组电流保持平衡,同时消除了两套绕组之间的耦合现象,提高了线控转向系统的控制性能。
2、为达到上述目的,本发明采用的技术方案如下:
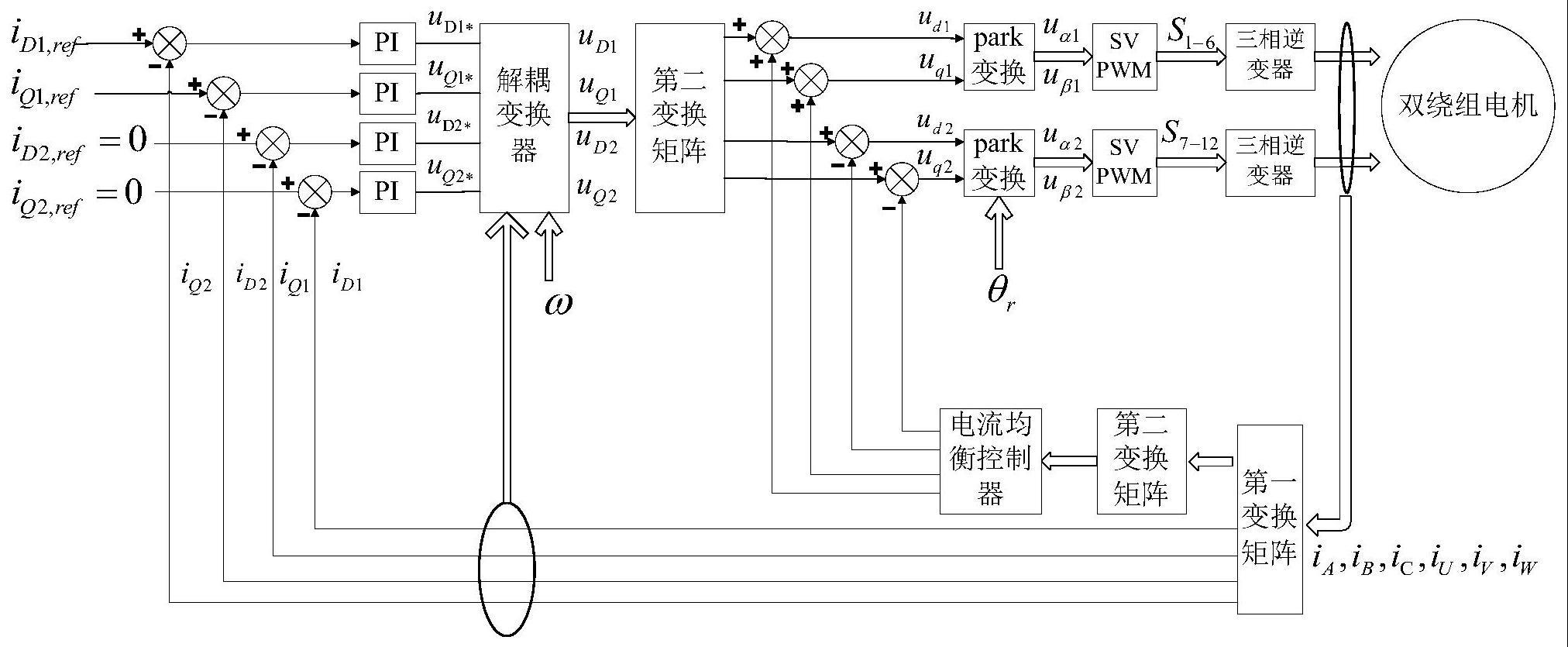
3、本发明的一种混合结构的双绕组电机电流均衡控制方法,步骤如下:
4、步骤1:接收d1轴和q1轴的参考电流id1,ref,iq1,ref,d2轴和q2轴的参考电流id2,ref,iq2,ref,其中,参考电流id2,ref,iq2,ref均为零;
5、步骤2:通过电流传感器采集双绕组电机的实际相电流ia,ib,ic,iu,iv,iw并通过第一变换矩阵tdq转换成d1轴、q1轴、d2轴、q2轴的实际电流id1,iq1,id2,iq2;通过电机位置传感器采集实际转子转速ω和实际转子角度θr;
6、步骤3:将d1轴的参考电流与实际电流作差,将q1轴的参考电流与实际电流作差,将d2轴的参考电流与实际电流作差,将q2的参考电流与实际电流作差,并将得到的差值结果分别输入到pi控制器中,pi控制器输出未解耦的d1轴、q1轴、d2轴、q2轴的参考电压ud1*,uq1*,ud2*,uq2*;
7、步骤4:将d1轴、q1轴、d2轴、q2轴的参考电压ud1*,uq1*,ud2*,uq2*,d1轴、q1轴、d2轴、q2轴的实际电流id1,iq1,id2,iq2和实际转子转速ω输入到解耦变换器,输出d1轴、q1轴、d2轴、q2轴的实际电压ud1,uq1,ud2,uq2;
8、步骤5:将d1轴、q1轴、d2轴、q2轴的实际电压ud1,uq1,ud2,uq2输入第二变换矩阵tdq,输出d1-q1子空间和d2-q2子空间的原始电压ud1,uq1,ud2,uq2;
9、步骤6:d1轴、q1轴、d2轴、q2轴的实际电流id1,iq1,id2,iq2经过第二变换矩阵tdq转化为d1-q1子空间和d2-q2子空间的实际电流id1,iq1,id2,iq2;
10、步骤7:将实际电流id1,iq1,id2,iq2输入电流均衡控制器,输出电流均衡补偿ud1+,uq1+,ud2+,uq2+;
11、步骤8:将所述电流均衡补偿ud1+,uq1+,ud2+,uq2+与原始电压ud1,uq1,ud2,uq2相加后的结果通过park逆变换得到α1-β1子空间和α2-β2子空间的实际电压uα1,uβ1,uα2,uβ2;
12、步骤9:将实际电压uα1,uβ1,uα2,uβ2输入到svpwm中,获得可驱动三相逆变器的电压信号s1-6和s7-12,由三相逆变器输出驱动电流到双绕组电机,驱动双绕组电机转动。
13、进一步地,所述步骤2中的第一变换矩阵tdq的表达式如下:
14、
15、
16、将第一变换矩阵tdq应用到相电流可得:
17、
18、式中,id1,iq1分别为d1轴实际电流和q1轴实际电流;id2,iq2分别为所述d2轴实际电流和q2轴实际电流。
19、进一步地,所述步骤3中的pi控制器的表达式如下:
20、u(t)=kpe(t)+ki∫e(t)dt
21、式中,u(t)为pi控制器输出信号,kp为比例系数,ki为积分系数,e(t)为输入的误差信号。
22、进一步地,所述步骤4中的解耦变换器的表达式如下:
23、
24、
25、式中,ld1,lq1,ld2,lq2为双绕组电机的同步电感,ψpm为永磁体磁链,ω为转子转速,p为极对数。
26、进一步地,所述步骤5中的第二变换矩阵的表达式为:
27、
28、进一步地,所述步骤7中的电流均衡控制器执行如下步骤:
29、将实际电流iq1与iq2的差值输入到pi控制器中,pi控制器输出的补偿信号uq1+与第一绕组q轴pi控制器的输出信号相加,pi控制器输出的补偿信号uq2+与第二绕组q轴pi控制器的输出信号相加,实现平衡q1轴和q2轴电流;将电流id1和id2的差值输入到pi控制器中,pi控制器输出的补偿信号ud1+与第一绕组d轴pi控制器的输出信号相加,pi控制器输出的补偿信号ud2+与第二绕组d轴pi控制器的输出信号相加,实现平衡d1轴和d2轴电流;
30、补偿信号ud1+,uq1+,ud2+,uq2+满足以下关系:
31、
32、进一步地,所述步骤8中的park逆变换表示为:
33、
34、式中,θr为转子实际角度。
35、本发明的有益效果:
36、本发明可以有效地消除双绕电机两套绕组之间电流不均衡现象,使得两套绕组的电流相等,降低双绕组电机的电流不均衡程度,提高了电机整体的,延长电机使用寿命。同时,本发明提出的混合坐标变换结构,消除了双绕组电机两套绕组之间的耦合现象,在对双绕组电机设计控制算法时,可将其视为一个普通的三相电机,相比双dq坐标变换结构更具有一般性,控制性能更好。
技术特征:
1.一种混合结构的双绕组电机电流均衡控制方法,其特征在于,步骤如下:
2.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤2中的第一变换矩阵tdq的表达式如下:
3.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤3中的pi控制器的表达式如下:
4.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤4中的解耦变换器的表达式如下:
5.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤5中的第二变换矩阵的表达式为:
6.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤7中的电流均衡控制器执行如下步骤:
7.根据权利要求1所述的混合结构的双绕组电机电流均衡控制方法,其特征在于,所述步骤8中的park逆变换表示为:
技术总结
本发明公开了一种混合结构的双绕组转向电机电流均衡控制方法及系统,该方法综合了矢量空间解耦坐标变换和双dq坐标变换的优势,可使两个绕组的电流保持平衡,同时消除了绕组之间的耦合现象,从而提高线控转向系统的控制性能;接收参考电流信号并通过变换矩阵将实际电流信号转换为参考电压信号,解耦变换器进一步处理参考电压信号,得到实际电压信号;通过Park逆变换和SVPWM将实际电压信号转化为驱动电流,驱动双绕组电机转动。本发明消除了双绕组转向电机的电流不均衡现象,提高转向角度跟踪控制性能,并具有更好的一般性和控制性能。该发明有望应用于线控转向系统等领域,提高系统的工作效率和稳定性。
技术研发人员:梁为何,赵万忠,王春燕,栾众楷,周小川
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!