一种临近空间无人机动力电池充放电控制方法及控制系统与流程
本发明属于能源系统,尤其是涉及一种临近空间无人机动力电池充放电控制方法。
背景技术:
1、临近空间长航时无人机能源系统为无人机提供能量来源,无人机能源的供给情况对无人机的飞行至关重要,无人机能源系统包括光伏发电系统、能源管理系统和储能系统三大部分,它为无人机平台有效载荷系统、控制系统等用电负载提供昼夜正常工作所需的能源。要保证无人机长时间在临近空间飞行,必须确保能源系统处于长期稳定的状态,使无人机能源昼夜闭环稳定运行,应使动力电池的充放电回路一直处于可控的状态下,满足动力电池运行期间一直处于安全的工况下。临近空间无人机能源系统为无人机提供能量来源,无人机能源的供给情况对无人机的飞行至关重要,因此能否合理控制动力电池的充放电回路显得尤为关键。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种临近空间无人机动力电池充放电控制方法及控制系统,使动力电池组运行在安全的工况下,延长电池组的寿命。
2、本发明是这样实现的,一种临近空间无人机动力电池充放电控制方法,包括如下步骤:
3、(1)获取动力电池的单体电压与电流采样数据;
4、(2)根据单体电压计算最高单体电压v1并根据电流采样数据计算实时电流和soc;
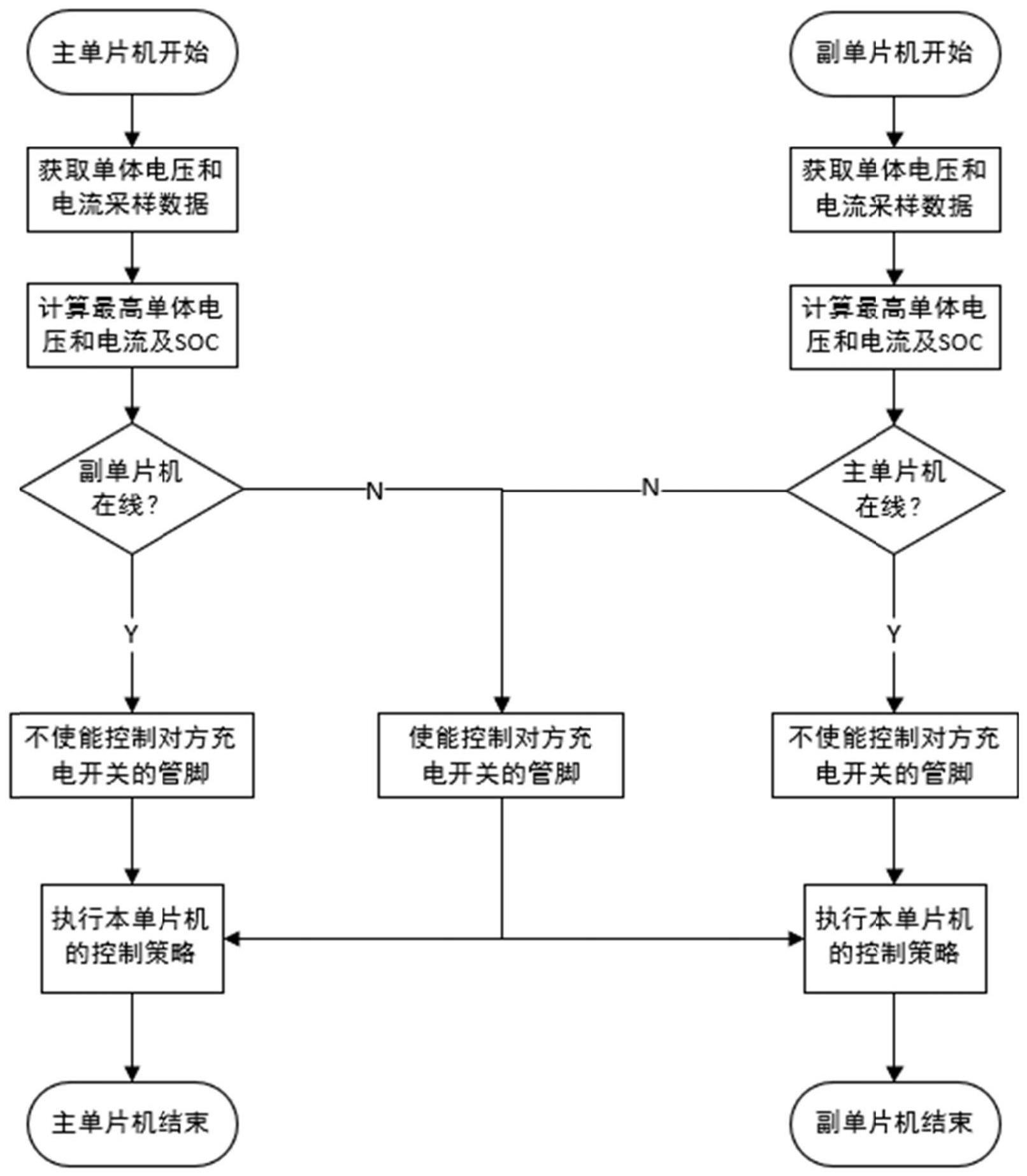
5、(3)主副单片机根据心跳信号判断对方是否在线并做出响应;
6、(4)根据实时最高单体电压和电流数据及标志位状态进行动力电池的充放电回路控制。
7、所述步骤(1)包括:将bms从采集板采集到的电压值传入主采集板并记入数组内,将主采集板中单片机的adc通道采集到的数值记为电流采样数据。
8、所述步骤(2)包括:
9、每100毫秒将单体电压数组的值进行冒泡法排序,得到一个电压由大到小的数组,该数组的第一个值即为最高单体电压v1;
10、计算实时电流的值,放电电流的计算公式如下:
11、i放电=k1×iadc1+b1
12、其中,i放电为电流实际值,其值为正,iadc1为bms通过adc通道1采集的数据经过滤波算法后算出的数值,k1为放电系数;
13、充电电流的计算公式如下:
14、i充电=k2×iadc2+b2
15、其中,i充电为电流实际值,其值为负,iadc2为bms通过adc通道2采集的数据经过滤波算法后算出的数值,k2为充电系数;
16、soc的计算公式如下:
17、socr=socl-(i/c)/3600
18、其中,socr为本周期soc,socl为上周期soc,i为电流,c为电池容量。
19、所述步骤(3)包括:主副单片机周期性地通过内部通讯向对方发送心跳信号并根据此信号判断对方是否在线,若对方离线,则通过使能自身指定管脚使对方的控制管脚失效;若对方在线,则不使能该管脚,并继续执行自身的控制逻辑;其中,若主单片机在线,则副单片机使用主单片机所采集的电流,否则使用自身所采集的电流。
20、所述步骤(4)包括:
21、判断动力电池是否处于去保护状态,若处于去保护状态,则管脚处于闭合状态,若未处于去保护状态,则继续执行控制逻辑;
22、判断动力电池是否处于满电状态,若处于满电状态,则开关处于断开状态,若未处于满电状态,则继续执行控制逻辑;
23、判断实时充电电流是否大于阈值,若大于阈值,则将回路断开,30秒后或检测到放电电流时恢复;
24、判断最高单体电压是否大于阈值,若大于阈值,则将开关断开,当最高单体电压小于规定值或检测到放电电流时恢复。
25、一种执行上述控制方法的临近空间无人机动力电池充放电控制系统,包括:
26、监测模块,用于收集动力电池单体电压与电流采样数据;
27、计算模块,用于根据单体电压数据计算出最高单体电压并根据电流采样数据计算实时电流和soc;
28、控制模块,用于根据计算模块计算的实时最高单体电压和电流数据及标志位状态进行判断,对动力电池的电流的通断进行控制。
29、所述控制模块设置有判断模块,判断模块根据所述计算结果进行动力电池的电流通断的控制。
30、本发明具有的优点和技术效果:本发明通过对无人机电池组的实时充放电及电压状态进行评估并加以控制,使动力电池组运行在安全的工况下,延长电池组的寿命。并且存在主副两路单片机且两路皆可独立控制充放电回路的通断,使得当一路控制开关失效后动力电池的充放电回路仍处于可控状态。为无人机的动力电池组状态提供数据支撑,助力无人机的长时间飞行,完成飞行任务。
技术特征:
1.一种临近空间无人机动力电池充放电控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述临近空间无人机动力电池充放电控制方法,其特征在于,所述步骤(1)包括:将bms从采集板采集到的电压值传入主采集板并记入数组内,将主采集板中单片机的adc通道采集到的数值记为电流采样数据。
3.根据权利要求1所述临近空间无人机动力电池充放电控制方法,其特征在于,所述步骤(2)包括:
4.根据权利要求1所述临近空间无人机动力电池充放电控制方法,其特征在于,所述步骤(3)包括:主副单片机周期性地通过内部通讯向对方发送心跳信号并根据此信号判断对方是否在线,若对方离线,则通过使能自身指定管脚使对方的控制管脚失效;若对方在线,则不使能该管脚,并继续执行自身的控制逻辑;其中,若主单片机在线,则副单片机使用主单片机所采集的电流,否则使用自身所采集的电流。
5.根据权利要求1所述临近空间无人机动力电池充放电控制方法,其特征在于,所述步骤(4)包括:
6.一种执行权利要求1-5任一项所述控制方法的临近空间无人机动力电池充放电控制系统,其特征在于,包括:
7.根据权利要求6所述临近空间无人机动力电池充放电控制系统,其特征在于,所述控制模块设置有判断模块,判断模块根据所述计算结果进行动力电池的电流通断的控制。
技术总结
本发明公开了一种临近空间无人机动力电池充放电控制方法及控制系统,属于能源系统领域,包括监测模块,计算模块与控制模块,监测模块实时监测和采集的动力电池组中各个单体电池的电压和电流模拟信号。计算模块计算出动力电池的最高单体电压和实时电流与SOC。控制模块根据计算和监测结果及标志位状态进行分析判断,对动力电池的充放电回路进行控制。通过对无人机动力电池组的实时充放电及电压状态进行评估并加以控制,使动力电池组运行在安全的工况下,延长电池组的寿命。主副两路单片机且两路皆可独立控制电流的通断,使得当一路单片机失效后动力电池的充放电仍处于可控状态。为无人机的动力电池组状态提供数据支撑,助力无人机的长时间飞行。
技术研发人员:檀帅林,王榘,刘文平,邢金富,呼文韬
受保护的技术使用者:中电科蓝天科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!