一种基于非匹配干扰补偿的永磁同步电机滑模控制方法
本发明属于电机调速控制,特别涉及一种基于非匹配干扰补偿的永磁同步电机滑模控制方法。
背景技术:
1、随着现代科学技术的飞速发展,特别是电力电子技术、微电子技术、数字控制技术和现代电机控制理论的巨大进步,为永磁同步电机交流伺服系统的发展创造了有利条件,特别是在精密雷达、军用武器、数控机床等对交流伺服电机性能、控制精度要求越来越高的领域。目前,永磁同步电机交流伺服调速系统大多采用双闭环的控制结构,即内环为电流控制环,外环为速度控制环。但是,双闭环的控制方法结构复杂,并且动态性能较差。因此,速度-电流单环控制策略得到越来越多的关注。
2、在实际调速系统中存在参数不确定性和负载扰动,这导致传统的线性控制方法不能保证电机具有足够高的运行精度;而滑模变结构控制以其对不确定性和外部干扰具有鲁棒性强、动态响应快等特点,被广泛应用到永磁同步电机调速系统中。但是,传统滑模控制算法存在抖振问题,这会对调速系统产生致命的破坏;为了削弱不必要的抖振,需要在滑模控制的基础上采用其它控制理论对控制器进行有效改进;此外,电流传感器引起的测量噪声会影响电机调速系统的稳态性能;因此,需要在保证系统具有良好动态性能的前提下,解决传感器测量噪声抑制的问题。
技术实现思路
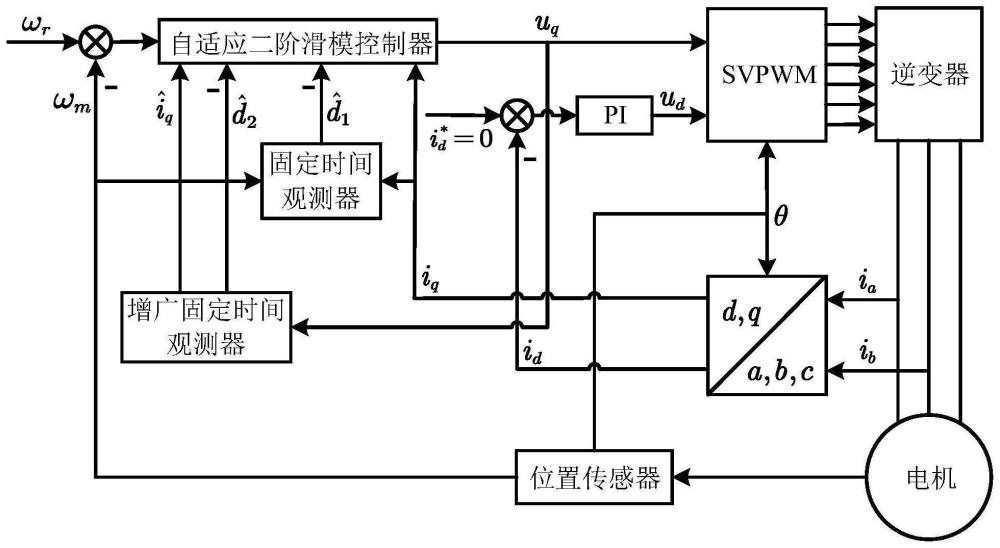
1、本发明解决目前永磁同步电机的调速问题,本发明提出了基于非匹配干扰补偿的永磁同步电机滑模控制方法,不仅简化了调速系统的控制结构,削弱了滑模控制中存在的抖振现象,而且能提升永磁同步电机调速系统的稳态性能。
2、本发明的技术方案为:
3、一种基于非匹配干扰补偿的永磁同步电机滑模控制方法,包括:
4、步骤一,构建永磁同步电机速度-电流单环控制数学模型,定义滑模变量,建立含有非匹配干扰的滑模动力学系统;
5、步骤二,针对上述滑模动力学系统中的非匹配干扰,设计固定时间观测器对其进行观测,并在此基础上设计二阶滑模控制器;
6、步骤三,针对上述二阶滑模控制器,提出一种自适应增益调节方法,得到自适应二阶滑模控制器;
7、步骤四,设计增广固定时间观测器对电机q轴电流与系统中的匹配干扰进行观测;
8、步骤五,将电机q轴电流与匹配干扰的观测值反馈到自适应二阶滑模控制器中,得到复合二阶滑模控制器。
9、进一步,步骤一中永磁同步电机速度-电流单环控制数学模型为:
10、
11、其中,ωm为电机转速,j为转动惯量,np为极对数,ψf为转子磁链,iq为q轴定子电流,b为摩擦系数,tl为负载转矩,ls为定子电感,rs为定子电阻,uq为q轴定子电压。
12、令x1=ωm,x2=iq,和可以得到:
13、
14、定义速度跟踪误差为ωr,滑模变量s1=x1-ωr和s2=ax2,可以得到:
15、
16、其中,为非匹配干扰,为控制增益,u=uq为滑模动力学系统的输入信号,d2=acx2+adx1为匹配干扰。
17、进一步,步骤二中设计固定时间观测器对非匹配干扰d1进行观测,其形式为:
18、
19、其中,和分别为s1和d1的观测值,k1和k2为固定时间观测器参数,函数的表达式为:
20、
21、其中,符号表示为m1和m2为正奇数且m2>m1。
22、进一步,步骤二中二阶滑模控制器设计为:
23、
24、其中,p,q1和q2为正常数且p≥q1=2q2,l为二阶滑模控制器增益。
25、进一步,步骤三中设计自适应二阶滑模控制器为:
26、
27、其中,l(|s1|)为自适应律,其表达式为:
28、
29、其中,ρ和λ为自适应律参数。
30、自适应律l(|s1|)是一个在区间(0,+∞)内单调递增的函数,当滑模变量|s1|逐渐远离原点时,自适应律l(|s1|)的输出也会增大,从而提高控制器增益,减小电机速度跟踪误差。
31、进一步,步骤四中增广固定时间观测器设计为:
32、
33、其中,h1、h2和h3为增广固定时间观测器参数,滑模变量s2的增广状态为变量和分别为s2,s2和d2的观测值,函数的表达式为:
34、
35、其中,n1和n2为正奇数且n2>n1。
36、进一步,步骤五中将电机q轴电流与匹配干扰的观测值反馈到自适应二阶滑模控制器中,构造复合二阶滑模控制器为:
37、
38、其中,f为控制增益。
39、本发明的有益效果:
40、1、采用基于永磁同步电机速度-电流单环控制的调速策略,简化了传统矢量控制方法的结构,提升了电机调速系统的动态性能;
41、2、利用单调递增的函数构造自适应律,并对二阶滑模控制器增益进行在线调节,该控制器不仅能削弱滑模控制中存在的抖振现象,而且能提升系统的抗干扰性能;
42、3、利用固定时间观测器对系统干扰与电机q轴电流进行观测,保证了观测误差的有限时间收敛,并且收敛时间与系统初始状态无关。
技术特征:
1.一种基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,包括以下几个步骤:
2.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,速度-电流单环控制数学模型为:
3.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,设计固定时间观测器对非匹配干扰d1进行观测,公式为:
4.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,二阶滑模控制器设计为:
5.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,自适应二阶滑模控制器为:
6.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,增广固定时间观测器设计为:
7.根据权利要求1所述的基于非匹配干扰补偿的永磁同步电机滑模控制方法,其特征在于,复合二阶滑模控制器为:
技术总结
本发明公开了一种基于非匹配干扰补偿的永磁同步电机滑模控制方法,属于永磁同步电机控制领域。本发明首先建立永磁同步电机速度‑电流单环控制数学模型,接着采用固定时间干扰观测器对系统非匹配干扰进行观测并补偿,然后为速度‑电流单环系统设计自适应二阶滑模控制器,最后构造增广固定时间观测器对电机q轴电流与系统集总干扰进行观测,并将观测值反馈到自适应二阶滑模控制器中,得到复合滑模控制器。本发明所提出的控制器的优点是采用固定时间干扰观测器来观测并补偿系统非匹配干扰,确保观测误差能在固定时间内收敛;设计的自适应二阶滑模控制器能在线调节滑模控制器增益的大小,避免了控制器增益选择过于保守,从而提升系统的稳态性能;利用增广固定时间观测器同时观测电机q轴电流与集总干扰,实现系统在有效抑制传感器测量噪声的情况下提升其抗干扰性能。
技术研发人员:后乾康,史兵,姜雷杰
受保护的技术使用者:常州大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!