一种电机控制方法、系统、设备和可读存储介质与流程
本申请实施例涉及发电机,具体涉及一种电机控制方法、系统、设备和可读存储介质。
背景技术:
1、在实际电机运行过程中,通过采集位置传感器信号来获得电机相位信息,并基于相位信息进行高性能控制。但是,一方面,由于运行环境的高温、潮湿、振动等环境影响,位置传感器可能会失效;另一方面,高精度位置传感器的安装不仅会增加系统的成本,还会导致系统的体积与复杂度增加。
2、对于发动机和电机直连的混合动力系统,通过发动机曲轴转速信号重构电机相位信息,算法简单,适用于全转速范围;不仅可以用于位置传感器失效时的电机控制,甚至可以取消位置传感器,降低系统成本。
3、现有技术的方案需要建立反电动势观测器模型,算法复杂,计算量大;由于闭环观测器和滤波器的存在,动态响应差;在低速下,反电动势信号弱,算法不适用低速场景。
技术实现思路
1、为此,本申请实施例提供一种电机控制方法、系统、设备和可读存储介质,不需要传统的电机位置传感器,允许在电机位置传感器失效时继续精准控制电机,甚至可以取消位置电机位置传感器。建立了发动机相位与电机相位之间的关系,得到所有电机同步控制点的发动机相位,基于发动机相位去触发电机同步控制;通过加入自适应系数的齿间隔预测算法,允许精确计算各个电机控制点的时刻,提高电机控制的准确性。
2、为了实现上述目的,本申请实施例提供如下技术方案:
3、根据本申请实施例的第一方面,提供了一种电机控制方法,所述方法包括:
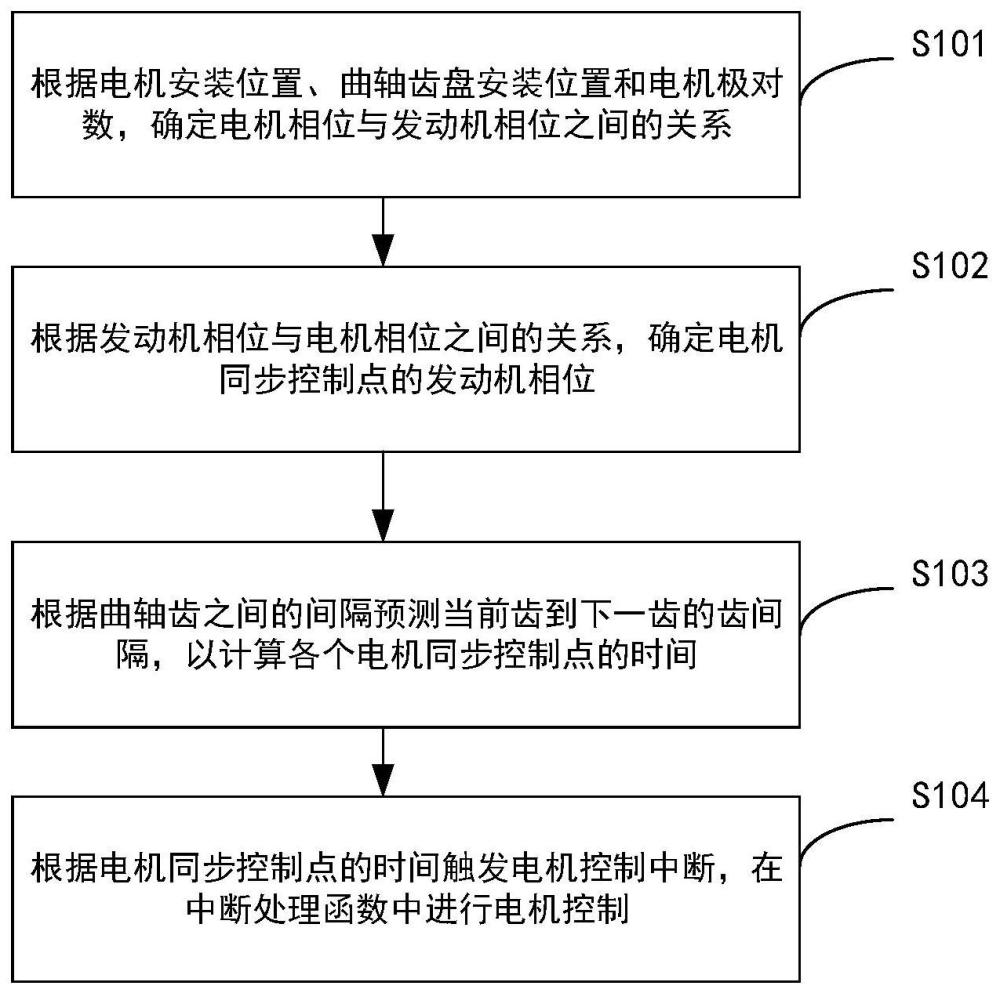
4、根据电机安装位置、曲轴齿盘安装位置和电机极对数,确定电机相位与发动机相位之间的关系;
5、根据发动机相位与电机相位之间的关系,确定电机同步控制点的发动机相位;
6、根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,以计算各个电机同步控制点的时间;
7、根据电机同步控制点的时间触发电机控制中断,在中断处理函数中进行电机控制。
8、可选地,所述根据电机安装位置、曲轴齿盘安装位置和电机极对数,按照如下公式确定电机相位与发动机相位之间的关系:
9、
10、其中,为电机相位,为曲轴齿盘存在的特殊齿后第一个正常齿的电机相位,pm为电机极对数,为发动机相位,为控制齿盘安装位置可使特殊齿后第一个正常齿处在特定位置的发动机相位。
11、可选地,根据发动机相位与电机相位之间的关系,按照如下公式确定电机同步控制点的发动机相位:
12、
13、其中,i为齿号,为第i个齿对应的发动机相位,为每个正常齿的齿宽。
14、可选地,根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,包括:
15、根据当前齿中断时刻和上一个齿的中断时刻,确定曲轴齿之间的时间间隔;
16、利用前一圈的齿间隔以及当前圈的齿间隔,预测当前圈的当前齿到下一齿的齿间隔。
17、可选地,所述根据当前齿中断时刻和上一个齿的中断时刻,按照如下公式确定曲轴齿之间的时间间隔,作为当前圈的齿间隔:
18、ti-1,u=ti,eng,tooth-ti-1,eng,tooth
19、其中,ti,eng,tooth为当前齿中断时刻,ti-1,eng,tooth为上一个齿的中断时刻,u表示当前曲轴圈的序号;
20、所述利用前一圈的齿间隔以及当前圈的齿间隔,按照如下公式预测当前圈的当前齿到下一齿的齿间隔:
21、ti,u,predicted=ti,u-1+(ti-1,u-ti-1,u-1)+ci,u
22、其中,ti,u-1表示上一圈u-1的从第i个齿到i+1齿的时间,ti-1,u-1表示上一圈的从第i-1个齿到i齿的时间,ci,u为每个齿的自适应系数,i为齿的序号。
23、可选地,计算各个电机同步控制点的时间,包括:
24、在电机的s*pm个控制点中,查找控制点发动机相位在之间的所有控制点;s为电机在一个电周期内的控制次数;pm为电机极对数;为第i个齿对应的发动机相位,为第i+1个齿对应的发动机相位;
25、按照如下公式计算各个电机同步控制点的时间:
26、
27、其中,k为某一个位于两齿之间的电机控制点,k∈[0,s*pm),为电机控制点对应的发动机相位,为每个正常齿的齿宽。
28、根据本申请实施例的第二方面,提供了一种电机控制系统,所述系统包括:
29、相位关系模块,用于根据电机安装位置、曲轴齿盘安装位置和电机极对数,确定电机相位与发动机相位之间的关系;
30、发动机相位模块,用于根据发动机相位与电机相位之间的关系,确定电机同步控制点的发动机相位;
31、控制时间模块,用于根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,以计算各个电机同步控制点的时间;
32、控制模块,用于根据电机同步控制点的时间触发电机控制中断,在中断处理函数中进行电机控制。
33、可选地,所述相位关系模块,按照如下公式:
34、
35、其中,为电机相位,为曲轴齿盘存在的特殊齿后第一个正常齿的电机相位,pm为电机极对数,为发动机相位,为控制齿盘安装位置可使特殊齿后第一个正常齿处在特定位置的发动机相位。
36、根据本申请实施例的第三方面,提供了一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行以实现上述第一方面所述的方法。
37、根据本申请实施例的第四方面,提供了一种计算机可读存储介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现上述第一方面所述的方法。
38、综上所述,本申请实施例提供了一种电机控制方法、系统、设备和可读存储介质,通过根据电机安装位置、曲轴齿盘安装位置和电机极对数,确定电机相位与发动机相位之间的关系;根据发动机相位与电机相位之间的关系,确定电机同步控制点的发动机相位;根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,以计算各个电机同步控制点的时间;根据电机同步控制点的时间触发电机控制中断,在中断处理函数中进行电机控制。不需要传统的电机位置传感器,允许在电机位置传感器失效时继续精准控制电机,甚至可以取消位置电机位置传感器。建立了发动机相位与电机相位之间的关系,得到所有电机同步控制点的发动机相位,基于发动机相位去触发电机同步控制;通过加入自适应系数的齿间隔预测算法,允许精确计算各个电机控制点的时刻,提高电机控制的准确性。
技术特征:
1.一种电机控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据电机安装位置、曲轴齿盘安装位置和电机极对数,按照如下公式确定电机相位与发动机相位之间的关系:
3.如权利要求2所述的方法,其特征在于,根据发动机相位与电机相位之间的关系,按照如下公式确定电机同步控制点的发动机相位:
4.如权利要求1所述的方法,其特征在于,根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,包括:
5.如权利要求4所述的方法,其特征在于,所述根据当前齿中断时刻和上一个齿的中断时刻,按照如下公式确定曲轴齿之间的时间间隔,作为当前圈的齿间隔:
6.如权利要求5所述的方法,其特征在于,计算各个电机同步控制点的时间,包括:
7.一种电机控制系统,其特征在于,所述系统包括:
8.如权利要求7所述的系统,其特征在于,所述相位关系模块,按照如下公式:
9.一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时执行以实现如权利要求1-6任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现如权利要求1-6任一项所述的方法。
技术总结
本申请实施例公开了一种电机控制方法、系统、设备和可读存储介质,所述方法包括:根据电机安装位置、曲轴齿盘安装位置和电机极对数,确定电机相位与发动机相位之间的关系;根据发动机相位与电机相位之间的关系,确定电机同步控制点的发动机相位;根据曲轴齿之间的间隔预测当前齿到下一齿的齿间隔,以计算各个电机同步控制点的时间;根据电机同步控制点的时间触发电机控制中断,在中断处理函数中进行电机控制。基于发动机相位去触发电机同步控制;同时精确计算各个电机控制点的时刻,提高电机控制的准确性。
技术研发人员:郭圣刚,刘思源,文志永,张中业,田新伟,李卫
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!