一种三相永磁无刷直流电机无转子位置传感器起动的控制方法与流程
本发明属于无刷直流电机控制,具体涉及三相永磁无刷直流电机无转子位置传感器起动的控制方法。
背景技术:
1、无转子位置传感器的三相永磁无刷直流电机结构更紧凑,制造成本更低。又由于省去了转子位置传感器及其相关电路,提高了驱动系统的可靠性。若系统是空载或轻载起动,通常采用无转子位置传感器的无刷直流电机。
2、三相永磁无刷直流电机必须在已知转子磁极位置的情况下,才能给三相绕组中的某两相串联通电,产生电磁转矩,使电机起动和运行。因为当转子磁极磁场沿电机气隙正弦分布时,磁极转动在三相对称绕组中感应的电动势与转子磁极位置之间有对应关系,所以目前在三相永磁无刷直流电机无感起动时,获取转子位置的通用方法是:测取电机三相绕组的电阻和电感,给三相绕组短时注入三相对称电流,驱动转子作小角位移转动,测量绕组的电压和电流,将测量值代入绕组的电压方程,计算出转子磁极转动在绕组中感应的电动势,再由该电动势计算出此刻的转子位置。
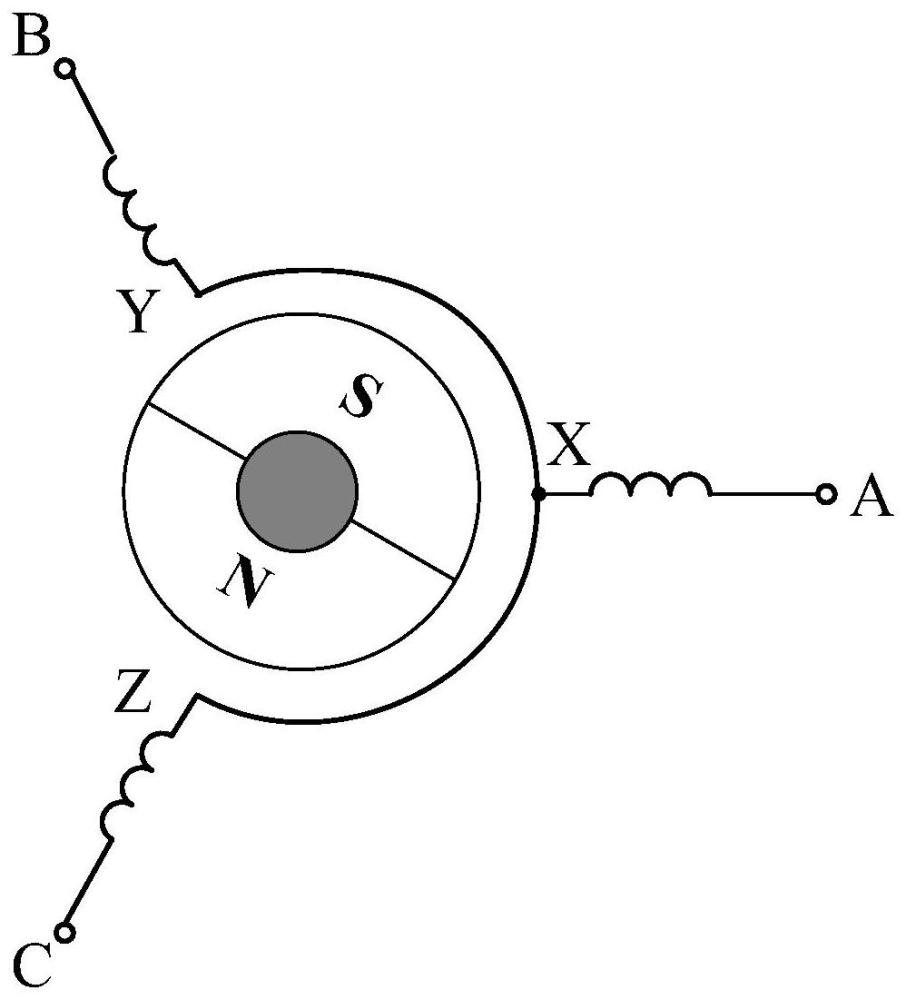
3、对于驱动系统常用的定子槽数与转子极数之比为3/2的三槽/两极三相永磁无刷直流电机,若断电停机时,电机轴上的负载转矩为零,由于转子永磁体与定子齿槽的相互作用,转子只会停在若干个磁阻转矩为零的平衡停驻位上。本发明旨在利用这一特点,同时利用转子磁极在三相绕组中感应的电动势与转子位置之间的对应关系,提供一种无需测量电流和计算电动势,专门针对三槽/两极三相永磁无刷直流电机无转子位置传感器起动的控制方法。
技术实现思路
1、本发明是一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,针对定子槽数与转子极数之比为3/2的三槽/两极电机,发明工作的步骤与内容如下:
2、1、依转子永磁体与定子齿槽相互作用产生的磁阻转矩为零的条件,确定转子停驻位并编号。就每个转子停驻位,按产生起动转矩最大的要求,确定三相绕组中串联通电起动的两相绕组。
3、2、搭建三槽/两极电机驱动系统,对电机三相绕组实施一轮两相依次串联的间歇短时的电流注入试验,驱动转子做一系列小角位移的往复转动,测取叠加了磁极往复转动在绕组中感应电动势的电机三相绕组输入端对直流电源负极的电压。随机改变转子位置,反复进行间歇注流试验,记录试验电压波形。
4、3、对间歇注流试验记录的大量电压波形进行统计分类,确定转子的停驻位数等于试验电压波形具有的不相同波形数。依据电路和电磁感应理论,推导转子处于各个停驻位时的间歇注流试验电压波形,将推导的电压波形与实测的各个不同电压波形比较配对,确定间歇注流试验电压波形与转子停驻位的对应关系。
5、4、间歇注流试验电压波形中叠加了注流电磁转矩驱动转子磁极小角位移转动在绕组中感应的电动势,采集能表达叠加该电动势的电压波形的电压表达值,由电压波形表达值定义计算能呈现各种不同试验电压波形特征的特征值。
6、5、建立间歇注流试验电压波形的特征值与转子停驻位及两相串联起动绕组之间的对应关系,电机无感起动时先进行间歇注流试验,获取试验电压波形特征值,由特征值确定电机的两相串联起动绕组,控制电机起动。
7、本发明具有的有益效果:
8、针对常用的无转子位置传感器的三槽/两极三相永磁无刷直流电机驱动系统,本发明利用其转子只停在若干个停驻位上的特点,仅通过测量抓取含有转子磁极感应电动势信息的间歇注流过程中的三相绕组输入端电压波形特征,判定转子停驻位,控制电机起动。对于三槽/两极电机而言,本发明免去了采用通用控制方法需要的电流测量和电动势计算,简化了控制流程,提高了控制精度。
技术特征:
1.一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,针对定子槽数与转子极数之比为3/2的三槽/两极电机,包括以下步骤:
2.根据权利要求1所述的一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,其特征在于:驱动系统包括连接于直流电源的三相桥(1),连接于三相桥(1)的电机(2),测取直流电源电压和三相绕组输入端对直流电源负极电压的电压测量电路(3),接受电压测量电路输出控制电机起动的数字微控制器(4),接受数字微控制器控制驱动三相桥中开关管通断的隔离驱动电路(5)。
3.根据权利要求1所述的一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,其特征在于:为确定转子停驻位,按照电机三相绕组的6种两相串联组合,实施一轮两相依次串联的间歇短时的电流注入试验:数字微控制器(4)通过隔离驱动电路(5)触发三相桥(1)的a相桥臂上管和b相桥臂下管导通,电机(2)ab两相绕组串联注流,经历导通时间τ后关断导通管,二极管续流至电机(2)断流并保持一段时间,绕组通电时电磁转矩驱动转子作小角位移转动,小角位移是指角位移小于相邻停驻位夹角的一半,绕组断电时磁阻转矩能驱动转子返回原停驻位,再触发a相桥臂上管和c相桥臂下管导通,ac两相串联注流,经历时间τ后关断导通管,二极管续流至断流并保持一段时间,通电时的电磁转矩和断电时的磁阻转矩驱动转子作小角位移的往复转动,以此类推,对电机(2)三相绕组的6种两相串联组合ab、ac、bc、ba、ca和cb实施一轮间歇短时的电流注入,驱动转子作一系列小角位移的往复转动;电压测量电路(3)测取直流电源电压ud,测取电机(2)三相绕组输入端对直流电源负极的电压ua、ub和uc,滤除高次谐波并将电压值按比例下降,输出至数字微控制器(4)。
4.根据权利要求1所述的一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,其特征在于:间歇注流时采集不通电相绕组输入端对直流电源负极电压的波形表达值:数字微控制器(4)采集电压测量电路(3)输出电压数据,在开关管导通a→b注流期间,数字微控制器(4)采集开关管刚导通经历0.15τ时的不通电c相电压uc(ab)s和0.85τ时的电压uc(ab)e,在开关管导通a→c注流期间,采集开关管刚导通经历0.15τ时的不通电b相电压ub(ac)s和0.85τ时的电压ub(ac)e,以此类推,在开关管导通b→c注流时采集a相电压ua(bc)s和ua(bc)e,在开关管导通b→a注流时采集c相电压uc(ba)s和uc(ba)e,在开关管导通c→a注流时采集b相电压ub(ca)s和ub(ca)e,在开关管导通c→b注流时采集a相电压ua(cb)s和ua(cb)e。
5.根据权利要求1所述的一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,其特征在于:定义计算间歇注流试验电压波形的特征值:由采集的电压波形表达值计算abc三相不通电时输入端电压波动变化的脉动量δua、δub和δuc,计算abc三相不通电时输入端电压连续升降变化的平均增量δua、δub和δuc;定义计算间歇注流时三相输入端电压波形的特征值x:当脉动量δua、δub、δuc中δua或δub或δuc最小时,x等于1或2或3;定义计算间歇注流时三相输入端电压波形的特征值y:当脉动量δua、δub、δuc中的最大值大于或小于设定值时,y等于0或1;在特征值x和y确定基础上,定义计算间歇注流时三相输入端电压波形的特征值z:由平均增量δua、δub和δuc的正负状况,决定z等于0或1。
6.根据权利要求1所述的一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,其特征在于:建立间歇注流时电机三相绕组输入端对直流电源负极电压波形的特征值与转子停驻位及两相串联起动绕组之间的对应关系:当特征值x等于1时转子处于3或6或9或12号位,当特征值x等于2时转子处于1或4或7或10号位,当特征值x等于3时转子处于2或5或8或11号位,当特征值y等于0时转子处于偶数编号位,当特征值y等于1时转子处于奇数编号位,由特征值x和y可确定转子处于两个可能的停驻位,最后由特征值z等于0或1确定转子处于某个停驻位;由转子停驻位与串联起动两相绕组的对应关系,导出特征值与两相串联起动绕组之间的对应关系。
技术总结
本发明是一种三相永磁无刷直流电机无转子位置传感器起动的控制方法,针对常用的定子槽数与转子极数之比为3/2的三槽/两极电机。利用该电机转子只停在若干个停驻位上的特点,利用转子磁极在三相绕组中感应的电动势与转子位置之间的对应关系,起动时先对电机进行间歇注流试验,测量抓取含有转子磁极感应电动势信息的三相绕组输入端对直流电源负极的电压波形特征,判定转子停驻位,控制电机起动。
技术研发人员:赵屹,彭亦稰,赵乾麟,叶佳宙
受保护的技术使用者:浙江乾麟缝制设备有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!