基于四相交错DC-DC电路的自适应PI调节方法、变换器与流程
本发明涉及电池化成分容,具体为基于四相交错dc-dc电路的自适应pi调节方法、变换器。
背景技术:
1、新能源行业目前受到越来越多的重视,在政策号召的响应下,新能源汽车迎来了顶峰发展,而锂电池作为新能源汽车的动力源,其重要性不言而喻。为了能提高新能源汽车的续航和动力能力,锂电池的质量就显得格外重要,所以化成电源设备的稳定性和高精度性成为关键。
2、且随着第3代宽禁带半导体器件和数字控制芯片的发展,化成电源朝着高开关频率、高效率(3h)和高功率密度的方向发展。为提高锂电池的工艺,提出了一种传统双闭环pi控制的方法,通过pi控制器对误差调控,双闭环pi控制器有着计算简单、稳定性好等特性,但是在面对系统发生负载突变和输出电压调节时,会出现实时响应慢、超调量大等缺陷。
技术实现思路
1、本发明的目的在于提供基于四相交错dc-dc电路的自适应pi调节方法、变换器,能够有效提升dc-dc变换器的瞬时动态响应和鲁棒性,做到在线根据变换器不同时刻下的不同电压,电流需求自适应调节pi值来改变开关管频率以达到电压、电流需求大小。
2、为实现上述目的,本发明提供如下技术方案:
3、基于四相交错dc-dc电路的自适应pi调节方法,本方法包括以下步骤:
4、采集直流变换器电池端电压和四相电感电流,确定所述直流变换器的工作模式;
5、根据所述工作模式确定控制策略,所述控制策略包括双闭环pi控制策略、模糊电压pi外环与四相电感电流内环控制策略;
6、根据双闭环pi控制策略或模糊电压pi外环与四相电感电流内环控制策略输出占空比生成pwm波形,以控制直流变换器内开关管的通断。
7、在上述技术方案中,所述工作模式包括buck模式与boost模式;当处于boost模式,采用电流环均流控制策略;当处于buck模式,采用双闭环pi均流控制策略或模糊电压pi外环与四相电感电流内环控制策略。
8、在上述技术方案中,所述模糊电压pi外环与四相电感电流内环控制策略包括:
9、设置电压目标值与电池端电压的比较值,将所述比较值量化处理,输入值模糊控制器中;
10、将误差与误差变化率的模糊集合为模糊控制器的输入,选择模糊控制器的隶属函数;
11、确定模糊推理方法,设置比例系数与积分系数的模糊规则表,确定比例系数与积分系数的整定规则;
12、根据整定规则对比例系数与积分系数进行解模糊化处理,输出pi控制器的控制参数;
13、比较所述控制参数与采样得到的四相电流,得到输出误差,将所述输出误差经四相pi控制器调制,得到占空比。
14、在上述技术方案中,所述控制参数为:
15、
16、其中,δkp为比例系数;eu(k)为电池端电压与电压目标值的当前误差,δki为积分系数;eu(j)为从电池端电压与电压目标值的实时误差总和,t是采样周期;
17、比较所述控制参数ifn与采样到的四相电感电流iln,得到输出误差;所述输出误差为
18、ein(k)=ifn(k)-iln n=1,2,3,4
19、将误差ein(k)经四相pi控制器调制作为驱动信号的控制量,即占空比dn,有:
20、
21、kpn、kin代表第n相电流pi控制器的比例控制系数与积分控制系数;dn为经过第n相电流pi控制器计算所得的第n相占空比。
22、在上述技术方案中,所述双闭环pi均流控制策略包括:
23、比较采集到的电池端电压与设定的电压参考值,确定差值;
24、将所述差值经过电压环pi调制,作为电感电流内环pi的参考值;
25、比较采集到的四相电感电流与电感电流内环pi的参考值,得到输出误差,将所述输出误差经四相pi控制器调制,得到占空比。
26、在上述技术方案中,所述电流环均流控制策略包括:
27、比较采集到的四相电感电流与设定的电流参考值,确定输出误差;
28、将所述输出误差经四相pi控制器调制,得到占空比。
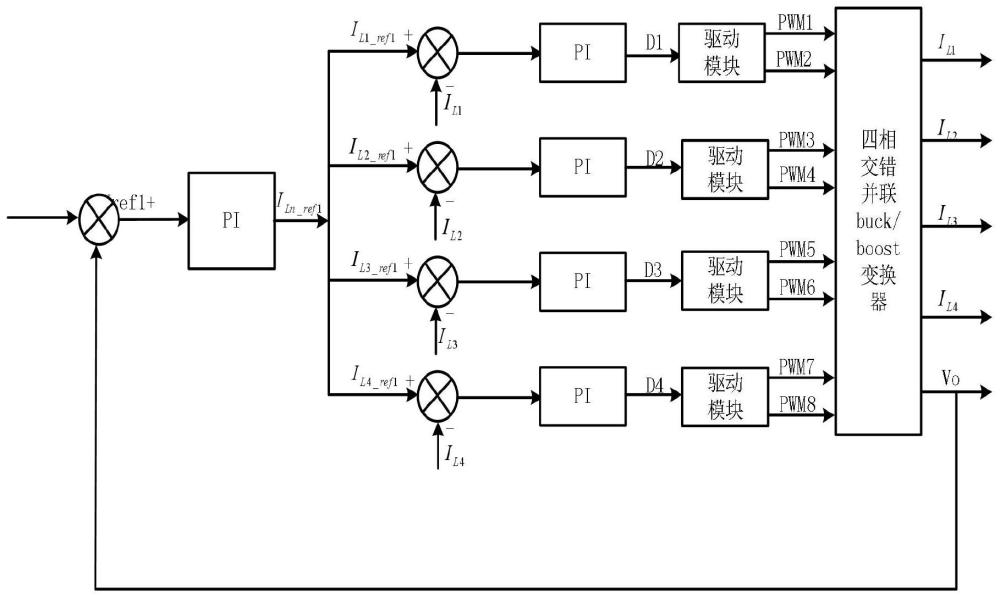
29、在上述技术方案中,将输出端电压vo与给定电压参考值vref1的差值定义为eu(k),有
30、eu(k)=uref1(k)-uo(k)
31、将输出误差eu(k)经过电压环pi调制后,作为电感电流内环pi的参考值:
32、
33、
34、其中,kp1是第一相电流pi控制器的比例控制系数;ki1是第一相电流pi控制器的积分控制系数;t是采样周期;ti是时间常数;
35、比较采集到的四相电感电流iln与电感电流内环pi的参考值iin_ref1(k),得到的输出误差,将所述输出误差定义为ein(k),则有
36、ein(k)=iin_ref1(k)-iln n=1,2,3,4
37、将输出误差ein(k)经四相pi调制后,作为驱动信号的控制量,即占空比dn,有
38、
39、kpn、kin代表第n相电流pi控制器的比例控制系数与积分控制系数;dn为经过第n相电流pi控制器计算所得的第n相占空比。
40、在上述技术方案中,根据双闭环pi控制策略或模糊pi双闭环控制策略输出占空比生成pwm波形,还包括:
41、获取四相独立的占空比,将第一相之后的每相占空比均往后移相位90°生成pwm波形,将上、下开关管的占空比进行反相操作;且反相操作时,存在占空比死区。
42、本申请还提供了一种四相交错buck/boost直流变换器,包括:主开关电源模块、辅助电源模块、功率模块、开关管驱动模块、采样模块、保护模块和串联锂电池组以及控制模块;所述控制模块执行如上任一所述的基于四相交错dc-dc电路的自适应pi调节方法。
43、与现有技术相比,本发明的有益效果是:
44、1、本申请提供的基于四相交错dc-dc电路的自适应pi调节方法以及变换器,选择以模糊控制和pi控制相结合的方式代替传统pi控制,可以在原有的基础上,提高变换器对应电流电压的实时变换响应。且在buck工作模式下,模糊pi与传统pi实施双闭环控制,能够做到在输入电压在可控范围条件下调整输出电压大小、负载突变等状况下的在线pi自整定。
45、2、本申请提供的基于四相交错dc-dc电路的自适应pi调节方法以及变换器,直流变换器选择四相交错并联的形式,提高变换器的功率等级,能有效减小电子元器件的损耗,电流纹波和电压纹波,能达到更高的精度要求。
技术特征:
1.基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,本方法包括以下步骤:
2.根据权利要求1所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,所述工作模式包括buck模式与boost模式;当处于boost模式,采用电流环均流控制策略;当处于buck模式,采用双闭环pi均流控制策略或模糊电压pi外环与四相电感电流内环控制策略。
3.根据权利要求2所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,所述模糊电压pi外环与四相电感电流内环控制策略包括:
4.根据权利要求3所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,所述控制参数为:
5.根据权利要求2所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,所述双闭环pi均流控制策略包括:
6.根据权利要求2所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,所述电流环均流控制策略包括:
7.根据权利要求5所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,将输出端电压vo与给定电压参考值vref1的差值定义为eu(k),有
8.根据权利要求7所述的基于四相交错dc-dc电路的自适应pi调节方法,其特征在于,根据双闭环pi控制策略或模糊pi双闭环控制策略输出占空比生成pwm波形,还包括:
9.一种变换器,其特征在于,包括:主开关电源模块、辅助电源模块、功率模块、开关管驱动模块、采样模块、保护模块和串联锂电池组以及控制模块;所述控制模块执行如权利要求1-8任一所述的基于四相交错dc-dc电路的自适应pi调节方法。
技术总结
本发明公开了基于四相交错DC‑DC电路的自适应PI调节方法、变换器,本方法包括以下步骤:采集直流变换器电池端电压和四相电感电流,确定所述直流变换器的工作模式;根据所述工作模式确定控制策略,所述控制策略包括双闭环PI控制策略、模糊电压PI外环与四相电感电流内环控制策略;根据双闭环PI控制策略或模糊电压PI外环与四相电感电流内环控制策略输出占空比生成PWM波形,以控制直流变换器内开关管的通断。本发明能够有效提升DC‑DC变换器的瞬时动态响应和鲁棒性,做到在线根据变换器不同时刻下的不同电压,电流需求自适应调节PI值来改变开关管频率以达到电压、电流需求大小。
技术研发人员:梁明,曾志永,张文生,刘木桂,蒙祖河
受保护的技术使用者:东莞光亚智能科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!