电机速度环变结构扩张状态观测器自抗扰控制方法及装置
本发明涉及电机控制领域,尤其涉及一种电机速度环变结构扩张状态观测器自抗扰控制方法及装置。
背景技术:
1、永磁同步电机因其具有体积小、结构简单、维修简便、转矩惯性比高、可靠性高、伺服系统优良等特点,在现代交流伺服系统中得到了广泛应用。pmsm作为一种典型的非线性多变量耦合系统,传统的pi控制难以满足高控制性能的要求,自抗扰控制器通过扩张状态观测器将所有未知扰动扩张成一个新的状态变量,提高了系统的抗扰性能。因此研究永磁同步电机自抗扰控制方法具有重要意义。
2、然而,传统的线性扩张状态观测器进行扰动观测时,仅对误差信号进行积分运算,对误差信号的利用率低,导致动态响应慢,最终导致对扰动的观测速度慢,从而拖累整个系统的反应速度。
3、目前也有一些方案中采用变化结构的扩张状态观测器,以便于同时利用两种扩张状态观测器的优点。但现有的采用变化结构的扩张状态观测器的方案中,由于需要直接对两种扩张状态观测器进行切换,会出现切换点初值不匹配导致的阶跃,体现在电机控制中会出现电机转速突减,电机抖动等现象。
技术实现思路
1、本发明的实施例提供一种电机速度环变结构扩张状态观测器自抗扰控制方法及装置,能够缓减两种扩张状态观测器进行切换,中出现的电机转速突减、电机抖动的现象。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、第一方面,本发明的实施例提供的方法,包括:
4、在每一个循环周期中,包括:
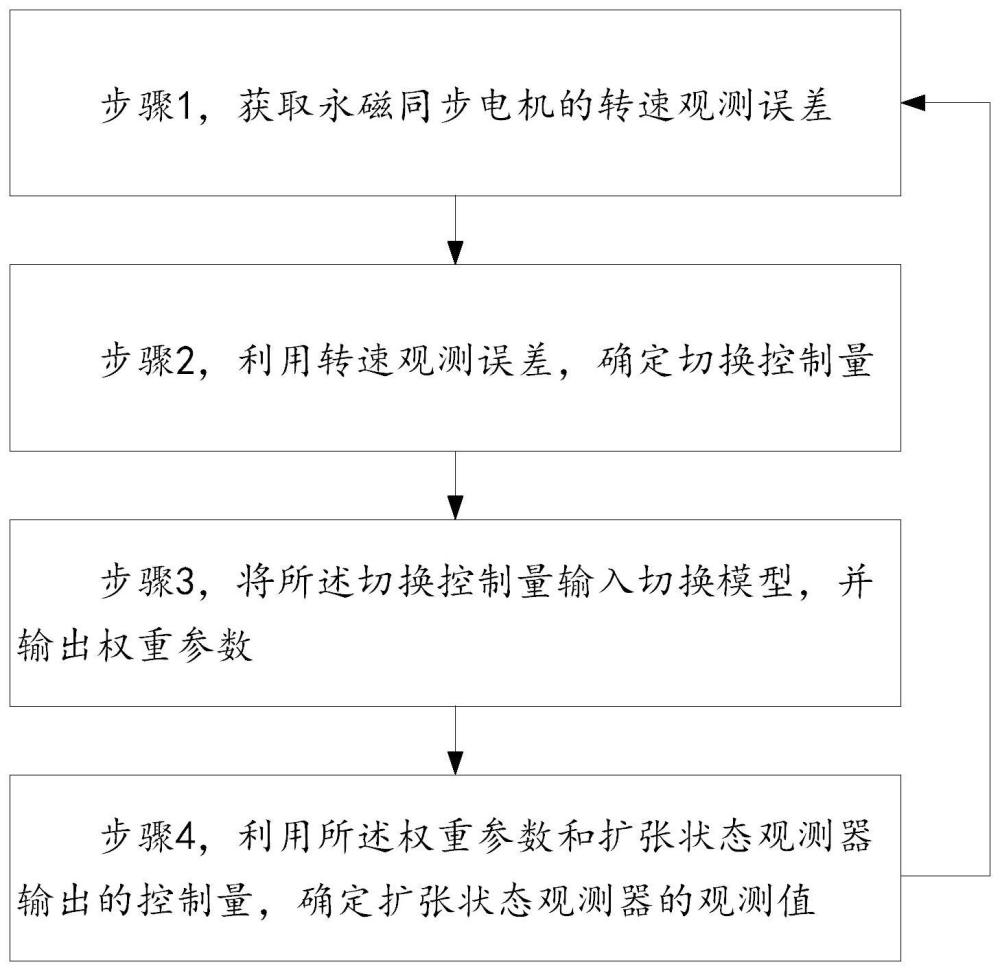
5、步骤1,获取永磁同步电机的转速观测误差;
6、步骤2,利用转速观测误差,确定切换控制量;
7、步骤3,将所述切换控制量输入切换模型,并输出权重参数;
8、步骤4,利用所述权重参数和扩张状态观测器输出的控制量,确定扩张状态观测器的观测值。
9、其中,所述扩张状态观测器包括:标准扩张状态观测器和快速扩张状态观测器;所述步骤1,包括:根据采样得到的永磁同步电机的转速和所述变结构扩张状态观测器观测得到的转速,获取所述转速观测误差。
10、所述步骤2,包括:利用所述转速观测误差确定观测负载转矩;根据观测负载转矩进行滤波后再进行微分计算,得到切换控制量。
11、所述步骤3中的权重参数包括:标准扩张状态观测器的控制权重σ1和快速扩张状态观测器的控制权重σ2;所述步骤4,包括:将步骤3所得的权重参数与所述标准扩张状态观测器的控制量和所述快速扩张状态观测器的控制量相乘后相加,得到变结构扩张状态观测器的观测值。
12、具体的,所述切换模型快速扩张状态观测器包括:
13、其中,β1、β2为第一误差反馈增益系数和第二误差反馈增益系数,β3为调节因子,当观测误差e1收敛至零时:观测值z1收敛至y,y表示电机实际转速,观测值z2收敛至负载转矩tl。
14、所述切换模型,包括:
15、tl=σ1a1(t)+σ2a2(t),
16、
17、σ2=1-σ1
18、其中,e0和e2分别是过渡过程观测负载转矩微分区域的下限和上限,a1(t)和a2(t)分别为标准扩张状态观测器输出的观测负载转矩和快速扩张状态观测器输出的观测负载转矩。
19、第二方面,本发明的实施例提供的装置,包括:
20、采集模块,用于获取永磁同步电机的转速观测误差;
21、预处理模块,用于利用转速观测误差,确定切换控制量;
22、第一计算模块,用于将所述切换控制量输入切换模型,并输出权重参数;
23、第二计算模块,用于利用所述权重参数和扩张状态观测器输出的控制量,确定扩张状态观测器的观测值。
24、具体的,所述扩张状态观测器包括:标准扩张状态观测器和快速扩张状态观测器;
25、所述采集模块,具体用于根据采样得到的永磁同步电机的转速和所述变结构扩张状态观测器观测得到的转速,获取所述转速观测误差。
26、具体的,所述预处理模块,具体用于利用所述转速观测误差确定观测负载转矩;根据观测负载转矩进行滤波后再进行微分计算,得到切换控制量。
27、具体的,所述第二计算模块,具体用于将所述第一计算模块输出的权重参数与所述标准扩张状态观测器的控制量和所述快速扩张状态观测器的控制量相乘后相加,得到变结构扩张状态观测器的观测值;
28、其中,所述权重参数包括:标准扩张状态观测器的控制权重σ1和快速扩张状态观测器的控制权重σ2。
29、本发明实施例提供的电机速度环变结构扩张状态观测器自抗扰控制方法及装置,通过快速扩张状态观测器与标准扩张状态观测器的平滑切换的混合切换策略,避免了电机转速因变结构而导致的突减与抖震,得到的变结构扩张状态观测器兼具快速扩张状态观测器的快速动态响应速度与标准扩张状态观测器的低稳态波动。从而缓减了直接对两种扩张状态观测器进行切换,会出现切换点初值不匹配导致的阶跃,体现在电机控制中会出现电机转速突减,电机抖动等现象。
技术特征:
1.一种电机速度环变结构扩张状态观测器自抗扰控制方法,其特征在于,在每一个循环周期中,包括:
2.根据权利要求1所述的方法,其特征在于,所述扩张状态观测器包括:标准扩张状态观测器和快速扩张状态观测器;
3.根据权利要求2所述的方法,其特征在于,所述步骤2,包括:
4.根据权利要求2所述的方法,其特征在于,所述步骤3中的权重参数包括:标准扩张状态观测器的控制权重σ1和快速扩张状态观测器的控制权重σ2;
5.根据权利要求1所述的方法,其特征在于,所述切换模型快速扩张状态观测器包括:
6.根据权利要求1或5所述的方法,其特征在于,所述切换模型,包括:
7.一种电机速度环变结构扩张状态观测器自抗扰控制装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述扩张状态观测器包括:标准扩张状态观测器和快速扩张状态观测器;
9.根据权利要求7所述的方法,其特征在于,所述预处理模块,具体用于利用所述转速观测误差确定观测负载转矩;根据观测负载转矩进行滤波后再进行微分计算,得到切换控制量。
10.根据权利要求7所述的方法,其特征在于,所述第二计算模块,具体用于将所述第一计算模块输出的权重参数与所述标准扩张状态观测器的控制量和所述快速扩张状态观测器的控制量相乘后相加,得到变结构扩张状态观测器的观测值;
技术总结
本发明实施例公开了一种电机速度环变结构扩张状态观测器自抗扰控制方法及装置,涉及电机控制领域。本发明通过在扩张状态观测器的扰动观测回路中添加一个调节因子构成一个快速扩张状态观测器,然后采用了一套平滑的切换策略进行标准扩张状态观测器以及快速扩张状态观测器之间的切换;电机工作在暂态时采用快速扩张状态观测器,电机工作在稳态时采用标准扩张状态观测器。本发明在标准扩张状态观测器基础上进行切换,兼具优秀的动态性能和稳态性能,进一步减小电流环给定电流波动,同时能够广泛应用于其他电机系统中。
技术研发人员:张徐飞,孟小利,杨怀志
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!