高精度转台控制系统的制作方法
本发明涉及转台控制,具体提供一种基于闭环pid控制的高精度转台控制系统。
背景技术:
1、转台作为高精度仿真测试设备、自动跟踪平台以及调姿态定位设备等,广泛应用于各个领域,是一种复杂的集机、电、光于一体的现代化设备,目前载荷外场实验转台多采用开环控制,虽可以设置速度,但由于机构或环境的影响,转速变化通常较大,无法实现实时调整。并且旋转方式单一,仅支持定速旋转,无法进行精准定位,现有的转台会导致图像重叠或撕裂,成像效果差。转动机构多采用步进电机或者伺服电机,虽然增加了减速机来提升旋转精度,但其本质无法达到转速无极调整,无法达到角度精准定位,因此,便无法进行定速、定角度的实时速率调整,无法实现定角度反复回扫功能。
技术实现思路
1、本发明为解决上述问题,提供了一种高精度转台控制系统,通过闭环pid控制实现了实时速率调整,极大提高了转台的控制精度。
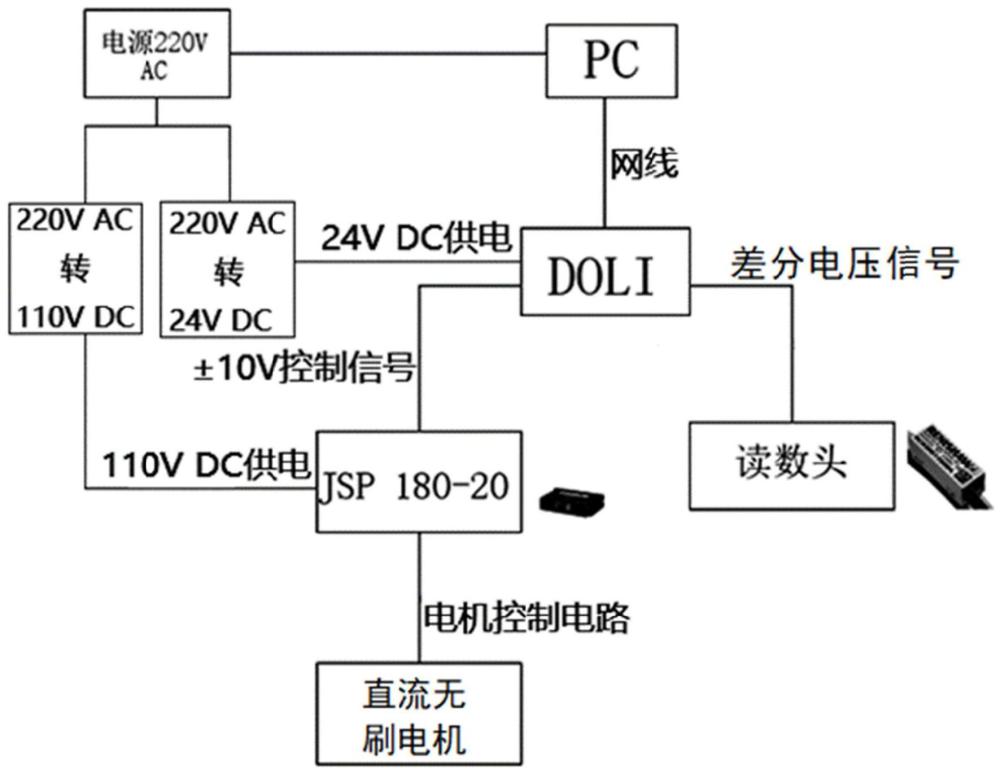
2、本发明提供的高精度转台控制系统,通过输入端将转速指令发送至控制器,控制器将转速指令转化为电信号,并发送至驱动器,驱动器驱动直流无刷电机执行转动动作;
3、设置角度传感器随直流无刷电机转动,并通过读数头读取角度传感器的角度变化量,将角度变化量反馈至控制器,控制器将角度变化量与转速指令进行数值比较,并通过pid运算实时调整控制器输出的电信号,实现pid闭环控制。
4、优选的,控制器采用edci20控制器。
5、优选的,驱动器采用jsp-180-2驱动器,其运行模式速度与扭矩模式,采用±10v电压控制。
6、优选的,角度传感器采用雷尼绍resm20系列增量式光栅。
7、优选的,读数头采用v2bji30d10b读数头,用于读取角度传感器上的角度变化量,将角度传感器的角度变化量转变为差分电压信号,并发送至控制器。
8、优选的,采用pc端作为输入端,并在pc端设置上位机软件,用于pid参数整定、设备调试及运行程序设计。
9、与现有技术相比,本发明能够取得如下有益效果:
10、本发明利用闭环pid控制对转台速率进行适时调整,提高了转台的控制精度,相比于现有的开环控制转台,本发明的转台采样速率更高、运算速度更快、扛干扰能力更强,并且本发明pc端进行pid参数整定,控制程序可编辑,人机交互和谐,使用过程更便捷,通过对上位机软件进行程序编写,可实现设备的加速、减速、变加速、变减速等多种运动状态,并且可设置不同速度梯度,使设备适用于更多的使用场景。
技术特征:
1.一种高精度转台控制系统,其特征在于,通过输入端将转速指令发送至控制器,所述控制器将转速指令转化为电信号,并发送至驱动器,所述驱动器驱动直流无刷电机执行转动动作;
2.如权利要求1所述的高精度转台控制系统,其特征在于,所述控制器采用edci20控制器。
3.如权利要求1所述的高精度转台控制系统,其特征在于,所述驱动器采用jsp-180-2驱动器,其运行模式速度与扭矩模式,采用±10v电压控制。
4.如权利要求1所述的高精度转台控制系统,其特征在于,所述角度传感器采用雷尼绍resm20系列增量式光栅。
5.如权利要求1所述的高精度转台控制系统,其特征在于,所述读数头采用v2bji30d10b读数头,用于读取角度传感器上的角度变化量,将所述角度传感器的角度变化量转变为差分电压信号,并发送至所述控制器。
6.如权利要求1所述的高精度转台控制系统,其特征在于,采用pc端作为输入端,并在pc端设置上位机软件,用于pid参数整定、设备调试及运行程序设计。
技术总结
本发明涉及转台控制技术领域,具体提供一种高精度转台控制系统,在PC端输入转台的转速指令,将转速指令发送至控制器,控制器将转速指令转化为电信号,并发送至驱动器,驱动器依据电信号驱动直流无刷电机执行输入的转速;在直流无刷电机转动过程中,通过读数头实时获取电机实际转速,将实际转速反馈至控制器,控制器实际转速与转速指令进行数值比较,并通过PID运算实时调整控制器输出的电信号,实现PID闭环控制。本发明利用闭环PID控制对转台速率进行适时调整,提高了转台的控制精度,并且选择的设备具有适应环境能力强,应用场景广泛等优势。
技术研发人员:赵家锐,翟金龙,杨帆,郑威,贾真
受保护的技术使用者:长春国宇光学科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!