一种惯性导航旋转机构控制系统及控制方法与流程
本公开涉及惯性导航旋转控制领域,尤其涉及一种惯性导航旋转机构控制系统及控制方法。
背景技术:
1、惯性导航系统通过不断地正反旋转获得精确的位置定位,旋转速度越稳定获得的位置定位越精确,惯性导航系统定位精度的关键源于旋转机构的控制系统。
2、目前由于正弦波控制硬件设计的复杂性及控制系统要求的紧凑性使得难以设计出结构紧凑且使用正弦波控制的控制系统,从而使得当下紧凑性控制系统大多使用方波控制,但方波控制对于速度反馈的精度不高且低速控制难度比较大,从而使得使用方波控制的紧凑型控制器不能获得良好的速度稳定性及抗干扰能力,故而使得惯性导航系统的良好定位能力不能完整的发挥出来。
技术实现思路
1、为了解决现有技术中的至少一个技术问题,本公开提供了一种惯性导航旋转机构控制系统及控制方法。
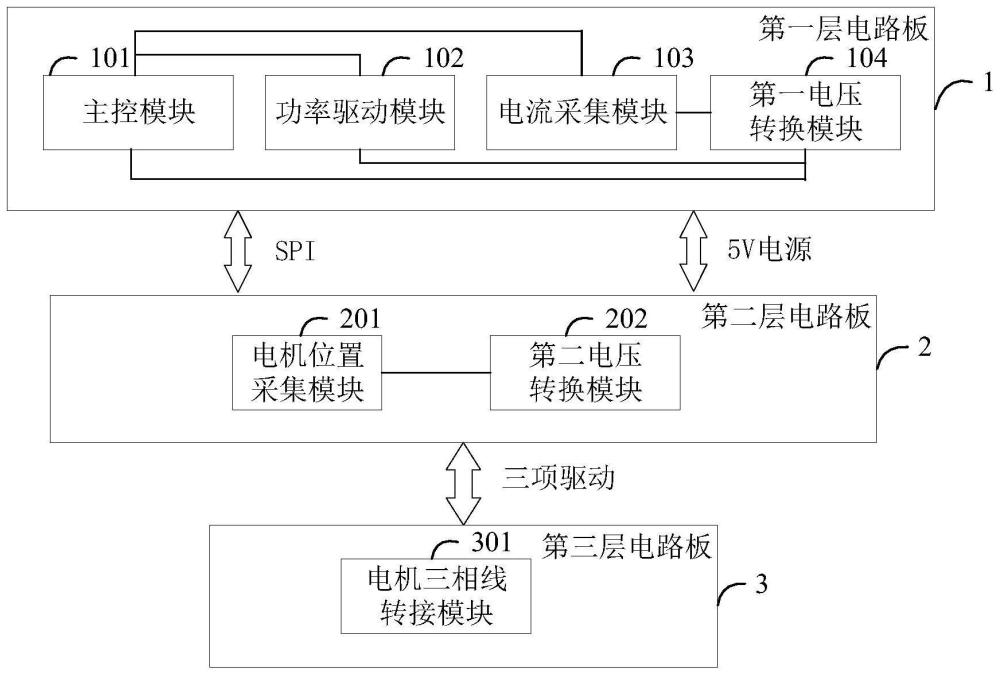
2、根据本公开的第一方面,提供了一种惯性导航旋转机构控制系统,包括第一层电路板、第二层电路板和第三层电路板;
3、所述第一层电路板,包括:
4、主控模块;
5、功率驱动模块,与所述主控模块相连;
6、电流采集模块,与所述主控模块相连;
7、第一电压转换模块,与所述主控模块、功率驱动模块和电流采集模块电连接;
8、所述第二层电路板,包括:
9、电机位置采集模块,与主控模块通信连接;
10、第二电压转换模块,与所述电机位置采集模块相连;
11、所述第三层电路板,包括:
12、电机三相线转接模块,与所述功率驱动模块通信连接。
13、可选的,所述电机位置采集模块与所述主控模块通过spi通讯连接。
14、可选的,所述电机位置采集模块采用磁编码器芯片采集电机位置。
15、可选的,所述系统还包括电机堵转保护模块,所述电机堵转保护模块分别与所述主控模块和所述功率驱动模块相连。
16、可选的,所述系统还包括永磁同步电机及减速器。
17、可选的,所述第一电压转换模块的输入端与所述第二电压转换模块的输出端相连。
18、根据本公开的第二方面,一种惯性导航旋转机构控制方法,采用根据本公开第一方面任一所述的惯性导航旋转机构控制系统,所述方法包括:
19、主控模块获取电机速度指令、位置采集模块采集的电机位置以及电流采集模块检测的相线电流,根据所述电机位置、所述相线电流和所述电机速度指令,确定三相pwm控制信号,将所述三项pwm控制信号发送给功率驱动模块。
20、可选的,所述主控模块获取电机速度指令,包括:
21、获取模拟电压,所述模拟电压根据外部指令指示的速度生成;
22、根据模拟电压转换得到电机速度指令。
23、可选的,所述根据所述电机位置、所述相线电流和所述电机速度指令,确定三相pwm控制信号,包括:
24、根据所述电机位置的变化率计算电机机械转速;
25、根据所述电机机械转速和所述电机速度指令计算速度误差;
26、根据所述速度误差计算电流q轴电流参考值;
27、根据所述相线电流,利用clarke变换和park变换,得到q轴电流和d轴电流;
28、基于q轴电流参考值、q轴电流和d轴电流,确定三相pwm控制信号。
29、可选的,所述基于q轴电流参考值、q轴电流和d轴电流,确定三相pwm控制信号,包括:
30、比较q轴电流与q轴电流参考值,d轴电流id与0,得到电流误差;
31、利用pi调节器处理所述电流误差,计算q轴电压参考值和d轴电压参考值;
32、根据q轴电压参考值和d轴电压参考值,进行反park和空间矢量pwm计算,得到三相pwm控制信号。
33、本公开实施例中提供的一个或多个技术方案,本公开的技术方案各个功能模块配合可以用于正弦波控制,系统按功能将控制、驱动、采集模块分配到不同层板上,主控模块远离功率驱动模块,使数字控制信号不易受到驱动器开关噪声干扰,机位置采集模块单独一层与主控模块所在的控制层接近,避免长线传输误差。使得本公开的技术方案使得数字控制信号抗干扰能力强、数据传输误差小,在可以在结构紧凑的前提下实现正弦波控制。
技术特征:
1.一种惯性导航旋转机构控制系统,其特征在于,包括第一层电路板、第二层电路板和第三层电路板;
2.根据权利要求1所述的系统,其特征在于,所述电机位置采集模块与所述主控模块通过spi通讯连接。
3.根据权利要求1所述的系统,其特征在于,所述电机位置采集模块采用磁编码器芯片采集电机位置。
4.根据权利要求1所述的系统,其特征在于,所述系统还包括电机堵转保护模块,所述电机堵转保护模块分别与所述主控模块和所述功率驱动模块相连。
5.根据权利要求1所述的系统,其特征在于,所述系统还包括永磁同步电机及减速器。
6.根据权利要求1所述的系统,其特征在于,所述第一电压转换模块的输入端与所述第二电压转换模块的输出端相连。
7.一种惯性导航旋转机构控制方法,其特征在于,采用根据权利要求1~6任一所述的惯性导航旋转机构控制系统,所述方法包括:
8.根据权利要求7所述的方法,其特征在于,所述主控模块获取电机速度指令,包括:
9.根据权利要求7所述的方法,其特征在于,所述根据所述电机位置、所述相线电流和所述电机速度指令,确定三相pwm控制信号,包括:
10.根据权利要求9所述的方法,其特征在于,所述基于q轴电流参考值、q轴电流和d轴电流,确定三相pwm控制信号,包括:
技术总结
本公开提供了一种惯性导航旋转机构控制系统及控制方法。系统包括第一层电路板、第二层电路板和第三层电路板;第一层电路板,包括:主控模块;功率驱动模块,与主控模块相连;电流采集模块,与主控模块相连;第一电压转换模块,与主控模块、功率驱动模块和电流采集模块电连接;第二层电路板,包括:电机位置采集模块,与主控模块通信连接;第二电压转换模块,与电机位置采集模块相连;第三层电路板,包括:电机三相线转接模块,与功率驱动模块通信连接。实施本公开的技术方案,可使得结构更为紧凑。
技术研发人员:刘博,李志阔,张华,唐勇斌,祝波,曹兴帅,赵蒙,孟楠,苏恺伦,张亚涛
受保护的技术使用者:航天科工智能机器人有限责任公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!