一种大型望远镜抗扰动合成负载转矩观测器
本发明涉及大型望远镜拼接弧线电机轴系驱动控制技术,具体涉及一种大型望远镜抗扰动合成负载转矩观测器。
背景技术:
1、随着望远镜口径不断增大,跟踪架结构和驱动方式也在不断改进,轴系驱动电机结构也在持续创新发展。国际上,拼接式电机是大型望远镜轴系驱动控制研究的热点,拼接式电机由于其特殊的结构在生产、制造及安装过程中存在偏差等问题导致大型望远镜在低速跟踪星体目标时易受到齿槽转矩的影响,容易产生较大的转矩、转速波动,从而影响望远镜观测效率。
2、常规的电机可以通过安装力矩传感器实时检测输出转矩,而大型望远镜通常轴系特别大,输出转矩高导致商用的力矩传感器无法满足安装条件和转矩测量要求。对于常规电机,为解决负载扰动带来的问题,现有的最大转矩电流比的转矩预测控制通常适用于交直轴电感不同的电机;已有的扩展卡尔曼滤波负载转矩观测器计算繁琐、滤波精度低等缺点对突变的扰动跟随效果较差,在对周期性扰动进行补偿时会出现周期性的抖动,无法满足大型望远镜低转矩波动需求。
3、因此,为提高望远镜跟踪控制系统性能,需要设计一款收敛速度快、抗干扰能力强的合成负载转矩观测器解决大型望远镜无法安装转矩传感器的难题。
技术实现思路
1、本发明的目的在于在提供一种大型望远镜抗扰动合成负载转矩观测器。
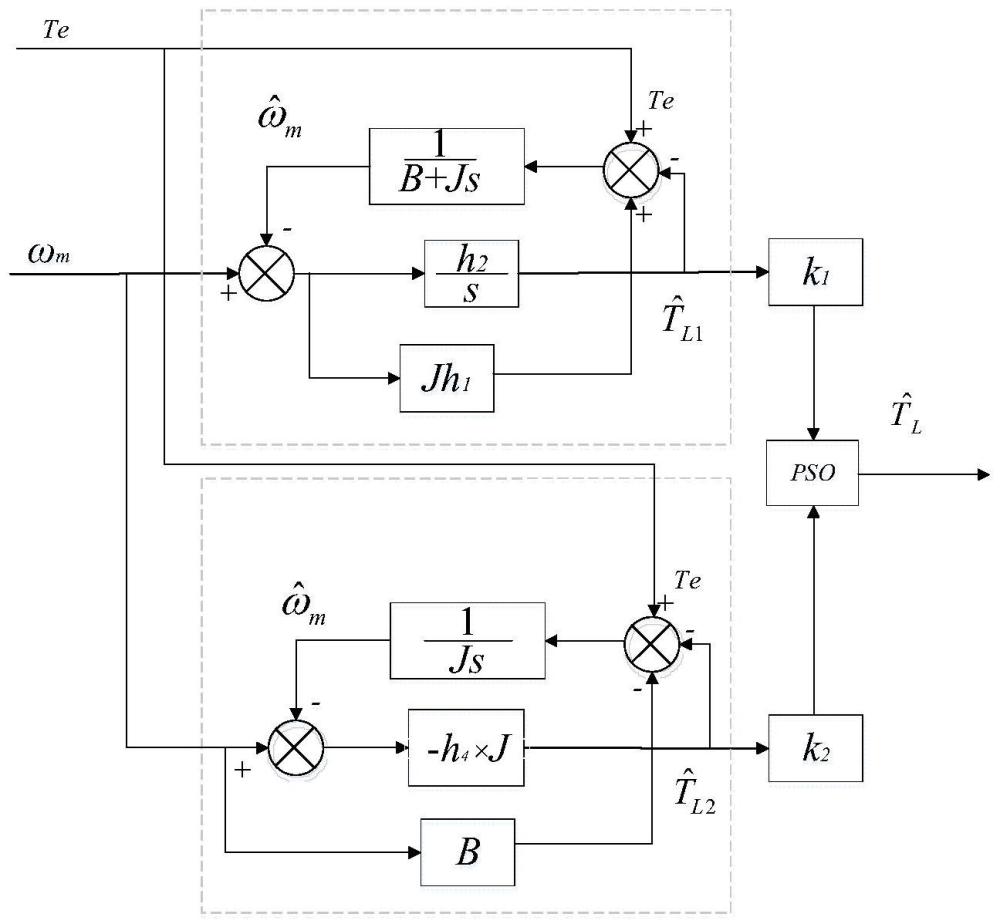
2、为实现上述目标,本发明的技术方案如下:一种大型望远镜抗扰动合成负载转矩观测器,采用降阶龙贝格负载转矩观测器与类低通滤波负载转矩观测器形成合成负载转矩观测器,合成负载转矩观测器传递函数如下式:
3、
4、式中,为降阶龙贝格负载转矩观测器的观测负载转矩,为类低通滤波负载转矩观测器的观测负载转矩,k1和k2为合成观测器的权重比;
5、所述降阶龙贝格负载转矩观测器的观测负载转矩,确定过程如下:
6、(1)、构建拼接弧线电机的机械运动方程为:
7、
8、式中,ωm表示电机转速;j表示转动惯量;b表示粘滞摩擦系数;tl表示负载转矩;te表示电磁转矩;
9、(2)、选取变量x=[ωm tl]t为状态变量,机械转速为输出变量y=ωm,构建大型望远镜拼接弧线电机的观测状态方程为:
10、
11、式中,为电机观测转速;表示负载转矩观测值;h1、h2为状态反馈增益系数;
12、(3)、将式(2)中的负载转矩观测项进行拉氏变换,得到降阶龙贝格负载转矩观测器的观测负载转矩为:
13、
14、所述类低通滤波负载转矩观测器的观测负载转矩,确定过程如下:
15、(1)、选取变量x=[ωm tl]t为状态变量,负载转矩为输出变量y=tl,根据式(1)构造大型望远镜拼接弧线电机新的观测状态方程为:
16、
17、(2)、将式(4)中负载转矩观测项进行拉氏变换,得到类低通滤波负载转矩观测器的观测负载转矩为:
18、
19、进一步的,采用粒子群算法优化权重比k1和k2,其中:
20、(1)以待优化的参数k1和k2为粒子;
21、(1)k1和k2初值均设置为0.5,种群规模n,搜索步长为s;
22、(2)k1和k2满足:
23、
24、(3)适应度函数包括转速误差部分和负载转矩误差部分,表示如下:
25、
26、(4)粒子和速度的更新公式为
27、
28、式中,i为粒子编号;d为维度编号,取2;vi,d为第i个粒子第d个维度的速度;ki,d为第i个粒子第d个维度的位置;w为惯性权重;c1为自我学习因子,c2为群体学习因子;pi,d为第i个粒子第d个维度的最优位置;pg,d为所有粒子第d的维度的历史最优位置;r1和r2为0~1之间的随机数。
29、一种大型望远镜抗扰动合成负载转矩观测方法,基于所述的大型望远镜抗扰动合成负载转矩观测器,实现大型望远镜抗扰动合成负载转矩观测。
30、本发明与现有技术相比,其显著优点为:1)改变了现有的大型望远镜拼接弧线电机没有商用力矩传感器也可以观测负载转矩的现状;2)合成负载转矩观测器抗扰动能力强,收敛速度快,并通过粒子群算法对每部分权重比进行实时优化。本发明可有效解决大型望远镜跟踪过程中外部扰动引起的转矩转速波动问题,进一步提高望远镜的观测效率。
技术特征:
1.一种大型望远镜抗扰动合成负载转矩观测器,其特征在于,采用降阶龙贝格负载转矩观测器与类低通滤波负载转矩观测器形成合成负载转矩观测器,合成负载转矩观测器传递函数如下式:
2.根据权利要求1所述的大型望远镜抗扰动合成负载转矩观测器,其特征在于,采用粒子群算法优化权重比k1和k2,其中:
3.根据权利要求1所述的大型望远镜抗扰动合成负载转矩观测器,其特征在于,设置种群规模为100,搜索步长为0.01,迭代次数为200次。
4.一种大型望远镜抗扰动合成负载转矩观测方法,其特征在于,基于权利要求1-3任一项所述的大型望远镜抗扰动合成负载转矩观测器,实现大型望远镜抗扰动合成负载转矩观测。
技术总结
本发明提供一种大型望远镜抗扰动合成负载转矩观测器,该系统包括:实际两个独立的负载转矩观测器,一个用于减少负载转矩观测误差,另一个用于提高负载转矩收敛速度;将所述的两个负载转矩观测器在合成负载转矩中的权重比用粒子群算法实时优化,使结果更逼近实际负载转矩值。本发明能够实时精确观测大型望远镜轴系驱动拼接弧线电机的负载转矩,有效解决大型望远镜跟踪过程中外部扰动引起的转矩转速波动问题,进一步提高望远镜的观测效率。
技术研发人员:宋晓莉,刘鑫,范壬秋,曹兆锦,叶宇
受保护的技术使用者:中国科学院南京天文光学技术研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!