一种基于磁场感应的无刷直流电机控制方向的方法与流程
本发明涉及无刷直流电机,具体为一种基于磁场感应的无刷直流电机控制方向的方法。
背景技术:
1、无刷直流电机是一种通过电子驱动器来控制转子磁场的电机,相比传统的刷式直流电机,无刷直流电机具有更高的效率、更长的寿命和更大的可靠性,因此在许多领域得到广泛应用,无刷直流电机在电动工具中得到广泛应用,如电动螺丝刀、电动钻等,其高效率和长寿命使得电动工具具有更好的工作性能和使用寿命,无刷直流电机还被广泛应用于汽车工业,如电动车辆、混合动力车辆和启停系统,其可靠性、高效率和低噪音使其成为优秀的替代方案。
2、但是传统的无刷直流电机在控制方向时通常依赖霍尔传感器来检测转子位置,使用霍尔传感器需要额外的硬件和布线,以连接和读取传感器信号,增加了系统成本,而增加的霍尔传感器是一个额外的组件,有可能因为磨损、松动或其他原因而出现故障,一旦传感器故障,电机控制系统可能无法正常工作,往往需要大范围维修和更换,所以增加了工人对无刷直流电机的维护难度,并且霍尔传感器的位置检测受到磁场不均匀等因素的影响,造成无法精准控制无刷直流电机转动方向。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的现状,而提供一种基于磁场感应的无刷直流电机控制方向的方法,通过磁场感应器获取无刷直流电机转子位置,根据转子位置通过adc采集反向电动势和相电流,计算相关的电流和速度,通过双环调控pwm控制磁场进行无刷直流电机方向的控制,利用电流和电压的反馈信号推导出转子位置,从而实现无需额外传感器的精准控制。
2、本发明解决上述技术问题所采用的技术方案为:一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,包括步骤:
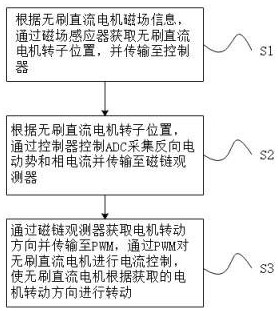
3、s1:根据无刷直流电机磁场信息,通过磁场感应器获取无刷直流电机转子位置,并传输至控制器;
4、s2:根据无刷直流电机转子位置,通过控制器控制adc采集反向电动势和相电流并传输至磁链观测器;
5、s3:通过磁链观测器获取电机转动方向并传输至pwm,通过pwm对无刷直流电机进行电流控制,使无刷直流电机根据获取的电机转动方向进行转动。
6、进一步地,在所述s1步骤前,通过设定的电压产生力矩以推动电机达到预设速度。
7、进一步地,所述电流控制包括电流内环控制和电流外环控制。
8、进一步地,所述电流控制通过无刷直流电机获取静止坐标系下的相关信号。
9、进一步地,根据获取的相关信号获取对应的电机方程,所述方程如下:
10、
11、式中,uα为α轴电压,uβ为β轴电压,rs为电机的电阻,ls为电机的电感,iα为α轴电流,iβ为为β轴电流,θe为电动势角度。
12、进一步地,通过反park变化操作对所述获取的电机方程进行处理获取无刷直流电机α轴与β轴电压,并根据spvwm获取三相电压。
13、进一步地,通过获取的所述三相电压与反向电动势计算出无刷直流电机转动角度。
14、进一步地,所述电流外环控制用于控制无刷直流电机的电流速度。
15、与现有技术相比,本发明至少含有以下有益效果:
16、(1)本发明的一种基于磁场感应的无刷直流电机控制方向的方法,利用电机本身产生的磁场信息来实现转子位置的准确检测,从而消除了传统霍尔传感器的需求;
17、(2)通过直接检测电机转子的磁场变化,可以获得更准确的转子位置信息,从而提高了控制的精度和响应性;
18、(3)减少了传感器的使用,降低了故障和维护的风险。
技术特征:
1.一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,在所述s1步骤前,通过设定的电压产生力矩以推动电机达到预设速度。
3.根据权利要求1所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,所述电流控制包括电流内环控制和电流外环控制。
4.根据权利要求3所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,所述电流控制通过无刷直流电机获取静止坐标系下的相关信号。
5.根据权利要求4所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,根据获取的相关信号获取对应的电机方程,所述方程如下:
6.根据权利要求5所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,通过反park变化操作对所述获取的电机方程进行处理获取无刷直流电机α轴与β轴电压,并根据spvwm获取三相电压。
7.根据权利要求6所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,通过获取的所述三相电压与反向电动势计算出无刷直流电机转动角度。
8.根据权利要求3所述的一种基于磁场感应的无刷直流电机控制方向的方法,其特征在于,所述电流外环控制用于控制无刷直流电机的电流速度。
技术总结
本发明公开了一种基于磁场感应的无刷直流电机控制方向的方法,具体涉及无刷直流电机技术领域,根据无刷直流电机磁场信息,通过磁场感应器获取无刷直流电机转子位置,并传输至控制器,再根据无刷直流电机转子位置,通过控制器控制ADC采集反向电动势和相电流并传输至磁链观测器,最后通过磁链观测器获取电机转动方向并传输至PWM,计算相关的电流和速度,通过PWM对无刷直流电机进行电流控制,根据获取的电机转动方向进行转动,降低了系统成本,消除了传统霍尔传感器的需求,减少了电路复杂性和元器件成本,使无刷直流电机利用电机本身产生的磁场信息,实现转子位置的准确检测,从而提高了控制的精度和响应性。
技术研发人员:王柯,方立锋,王欢
受保护的技术使用者:神通科技集团股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!