一种大容量永磁同步电机静止初始位置识别方法及系统与流程
本发明涉及电机控制,更具体地说,它涉及一种大容量永磁同步电机静止初始位置识别方法及系统。
背景技术:
1、永磁同步电机矢量控制需要获取转子磁场的准确位置角度,通常在获取磁极位置角度时,需要在电机轴端连接一个绝对位置角度编码器,以检测永磁同步电机的速度和磁极位置角度,但是对于无编码器的电机在启动阶段无法得到转子磁极的位置角度,需要开环控制电机启动,直到检测编码器的基准信号以后,矢量控制才可以正常使用。
2、而在初始位置角度不确定情况下,永磁同步电机启动的最优方法还是在静止情况下检测出磁极的准确初始位置角度,然后再启动,从而实现最大电流启动。然而,而常规初始位置识别算法在求取含位置信号的电流高频响应时,需要采用滤波环节实现载波信号分离与提取从而计算出转子位置,因此算法收敛较慢。
3、因此,如何研究设计一种能够克服上述缺陷的大容量永磁同步电机静止初始位置识别方法及系统是我们目前急需解决的问题。
技术实现思路
1、为解决现有技术中的不足,本发明的目的是提供一种大容量永磁同步电机静止初始位置识别方法及系统,在位置误差解耦时采用外差法求取电流响应的包络线,可避免使用滤波器,从而提高算法收敛速度且整个控制系统只需调节一组pi参数,调节方便,极大便利大容量高压控制系统现场调试。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
3、第一方面,提供了一种大容量永磁同步电机静止初始位置识别方法,包括以下步骤:
4、将高频电压方波注入电机d轴后,利用电流锁相环锁定观测角度;
5、利用电机d轴磁饱和效应,通过注入电压正负方波以在比较d轴正负电流大小后确定观测角度的ns极结果,结合ns极结果和观测角度确定转子初始位置角。
6、进一步的,所述将高频电压方波注入电机d轴后,利用电流锁相环锁定观测角度的过程具体为:
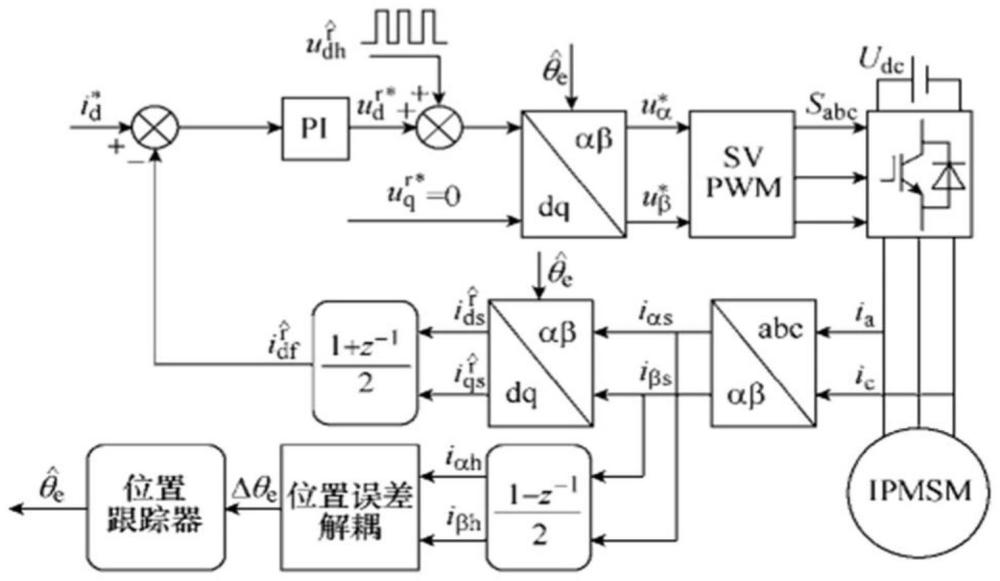
7、电机运转前,在电机d轴注入高频电压方波,q轴电压保持为0;
8、将采集出来的三相电流通过clark变换转换到αβ轴,提取α轴电流iαs的电流包络线iαh、β轴电流iβs的电流包络线iβh;
9、依据电流包络线iαh、iβh,通过外差法锁相得到观测角度与实际角度的误差,并得到观测角度;
10、将观测角度反馈到αβ轴以将α轴电流iαs、β轴电流iβs变换到dq轴,最后通过电流闭环调节完成对观测角度的锁定。
11、进一步的,所述观测角度与实际角度的误差消除依靠pi调节。
12、进一步的,所述通过注入电压正负方波以在比较d轴正负电流大小后确定观测角度的ns极结果具体过程为:
13、沿观测角度所对应的转子角度方向注入电压正负方波,采集相应方向的d轴正负电流;
14、分别计算正方向、负方向的d轴电流的绝对值并比较,通过绝对值比较结果确定d轴的ns极方向。
15、进一步的,所述正方向、负方向d轴电流的绝对值具体为:
16、电压正负方波注入期间,将正方向的d轴电流和负方向的d轴电流分别累加,并对最终累加的电流取绝对值,得到相应方向的d轴电流的绝对值。
17、进一步的,所述通过绝对值比较结果确定d轴的ns极方向的过程具体为:选取绝对值大的方向为n。
18、进一步的,所述电压正负方波注入至少两个周期。
19、进一步的,若所述ns极结果为n极,则转子初始位置角等于观测角度。
20、进一步的,若所述ns极结果为s极,则转子初始位置角为观测角度与180°之和。
21、第二方面,提供了一种大容量永磁同步电机静止初始位置识别系统,包括:
22、角度锁定模块,用于将高频电压方波注入电机d轴后,利用电流锁相环锁定观测角度;
23、ns极判断模块,用于利用电机d轴磁饱和效应,通过注入电压正负方波以在比较d轴正负电流大小后确定观测角度的ns极结果,结合ns极结果和观测角度确定转子初始位置角。
24、与现有技术相比,本发明具有以下有益效果:
25、1、本发明提供的一种大容量永磁同步电机静止初始位置识别方法,首先采用高频电压方波注入快速锁定转子初始位置,并且识别角度期间电机保持静止状态;然后在识别出来的角度方向注入电压正负方波,根据电机d轴磁饱和效应判断出识别出的角度是n极还是s极,相比于常规初始位置识别该算法构建的控制系统更为简单且调节方便,便于大容量高压控制系统现场调试。
26、2、本发明在位置误差解耦时采用外差法求取电流响应的包络线,而常规初始位置识别算法在求取含位置信号的电流高频响应时,需要采用滤波环节实现载波信号分离与提取,从而计算出转子位置,因此算法收敛较慢,本发明可避免使用滤波器,从而提高算法收敛速度且整个控制系统只需调节一组pi参数,调节方便,利于大容量高压控制系统现场调试;
27、3、本发明考虑到大容量高压系统的调试难度,利用高频方波注入简化电机电压电流方程,从而可依靠pi调节器完成对角度的快速搜索与准确锁定,调试方便高效,且该控制算法同样适用于一般永磁电机,故可使用同款变频器控制不同永磁电机,减小企业硬件开发成本。
技术特征:
1.一种大容量永磁同步电机静止初始位置识别方法,其特征是,包括以下步骤:
2.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述将高频电压方波注入电机d轴后,利用电流锁相环锁定观测角度的过程具体为:
3.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述观测角度与实际角度的误差消除依靠pi调节。
4.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述通过注入电压正负方波以在比较d轴正负电流大小后确定观测角度的ns极结果具体过程为:
5.根据权利要求4所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述正方向、负方向d轴电流的绝对值具体为:
6.根据权利要求4所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述通过绝对值比较结果确定d轴的ns极方向的过程具体为:选取绝对值大的方向为n。
7.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,所述电压正负方波注入至少两个周期。
8.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,若所述ns极结果为n极,则转子初始位置角等于观测角度。
9.根据权利要求1所述的一种大容量永磁同步电机静止初始位置识别方法,其特征是,若所述ns极结果为s极,则转子初始位置角为观测角度与180°之和。
10.一种大容量永磁同步电机静止初始位置识别系统,其特征是,包括:
技术总结
本发明公开了一种大容量永磁同步电机静止初始位置识别方法及系统,涉及电机控制技术领域,其技术方案要点是:将高频电压方波注入电机d轴后,利用电流锁相环锁定观测角度;利用电机d轴磁饱和效应,通过注入电压正负方波以在比较d轴正负电流大小后确定观测角度的NS极结果,结合NS极结果和观测角度确定转子初始位置角。本发明在位置误差解耦时采用外差法求取电流响应的包络线,可避免使用滤波器,从而提高算法收敛速度且整个控制系统只需调节一组PI参数,调节方便,利于大容量高压控制系统现场调试。
技术研发人员:李天成,冯海波,彭伟,黄磊,赖成毅,蒋国正
受保护的技术使用者:东方日立(成都)电控设备有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!