干涉仪电机匀速运动系统和方法与流程
本发明属于干涉电机控制。
背景技术:
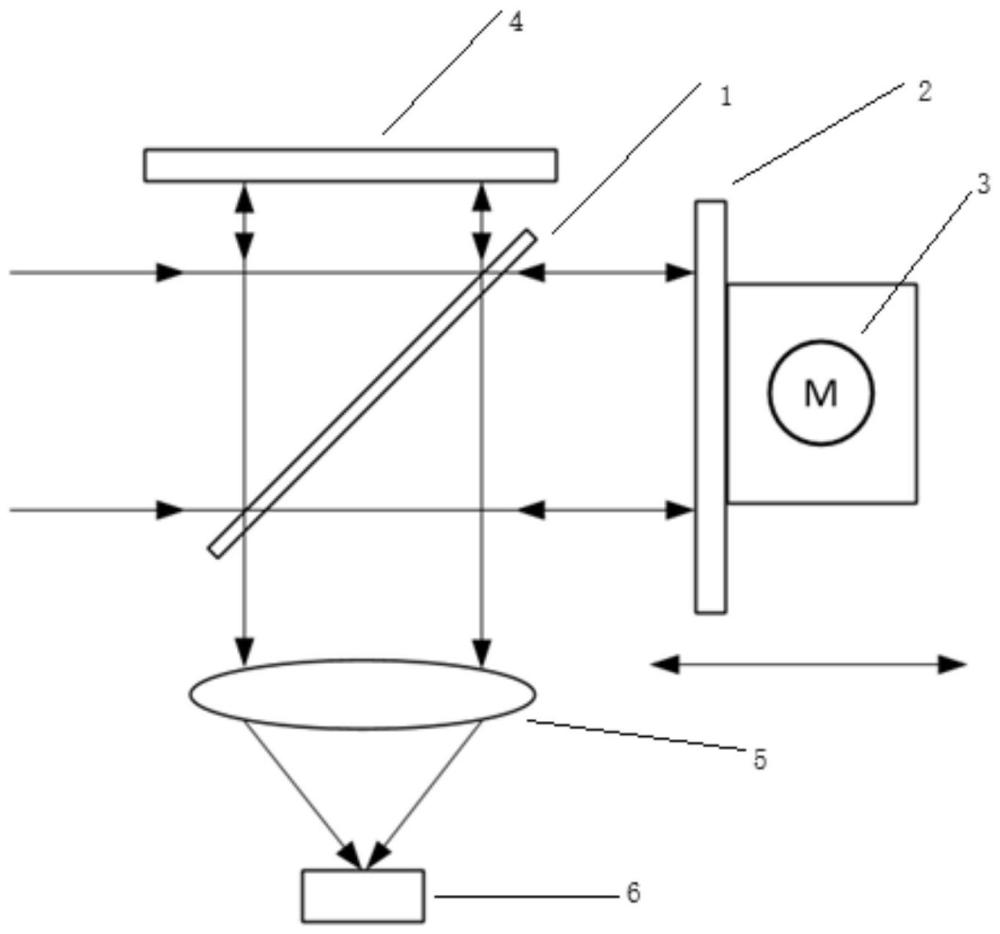
1、在干涉仪测量干涉光谱时,入射光束经过分束片分成两束强度相等的光,动镜在电机的带动下做往返运动,两束光因此产生物理效应形成干涉信号。数据采集系统对这一干涉信号作等间隔采样,得到离散化的干涉图。而电机带动的动镜运动是否匀速对于干涉图的采样至关重要。传统的电机驱动电路,信号源控制器控制信号源产生控制信号,通过驱动器控制电机运动。此类方案的缺点是开环控制下,电机的控制效果不受控。由于电机作往复运动时,从中心位置到最大摆幅的过程中受力不均匀,加上机械结构的阻力,电机无法匀速运动。
2、电机匀速闭环控制方案中,将旋转式电机以及弹簧绕轴组成的机构作为被控对象,针对旋转式电机工作原理构建被控对象传递函数模型;设计内环为电流环的pi控制器和外环为速度环的pid控制器;根据运动性能指标建立双闭环控制系统;引入新的速度反馈消除无阻尼振荡环节;优化非稳态匀速线性控制系统参数,建立非稳态匀速线性控制系统;通过所述非稳态匀速线性控制系统,控制红外光谱仪动镜运动。此方案缺点是:控制系统中涉及到的参数众多,计算繁杂,调试困难,具有局限性。控制系统中对电流、速度的采集为数字采样,具有离散性,且程序计算需要时间,控制信号比实际电机运动滞后,导致电机匀速运动控制效果不好。
3、现有技术是以旋转式电机及弹簧扰轴组成的机构作为被控对象,建立传递函数模型,模型表达式中涉及电机电压、线圈电阻、电感、转动惯量,弹簧系数,动圈导体磁密、有效长度、受力点等大量参数,函数模型建立过程比较复杂。如果被控对象结构稍有变动,各个参数都要重新计算,加大了模型的建立复杂程度。且如果更换电机种类,此数学模型就不再适用,具有很大的局限性。
4、另外,现有技术中的电流-速度双闭环系统为数字离散系统,电流的采集依赖于采集系统的采样频率和采样精度,电机的控制效果依赖于系统的控制频率;为控制电机在掉头转向时的惯性超调,现有发明在系统内加入了电机位置信息的判断,引入了位置判断误差。这些离散因素会降低电机的控制精度,导致谱图采样不均匀,影响光谱精度。
技术实现思路
1、有鉴于此,本发明提供了一种干涉仪电机匀速运动系统,包括:加法器、驱动器、干涉仪、全波整流电路、压频转换电路、第一放大器、电容、第二放大器、电阻、第三放大器;所述干涉仪包括干涉仪电机、激光探测器;所述加法器与驱动器一端信号连接;所述驱动器另一端连接到干涉仪电机正极;所述全波整流电路分别与压频转换电路和激光探测器信号相连;所述压频转换电路分别与第一放大器和全波整流电路信号相连;所述第一放大器一端与压频转换电路信号连接,另一端与电容和电阻相连;所述电容和电阻并联;所述电容一端与第一放大器相连,另一端与第二放大器相连;所述电阻一端与第一放大器相连,另一端与第三放大器相连;所述第二放大器和第三放大器的另一端并联到加法器的另一端。
2、在本发明的具体实施例中,所述干涉仪是指迈克尔逊干涉仪。
3、本发明还提供过了一种干涉仪电机匀速运动方法,包括如下步骤:电机开始运动后,干涉仪内产生频率变化的激光干涉光信号,经过激光探测器采集,将光信号转换为电信号;激光干涉的电信号经过全波整流电路,负半周信号变为正半周信号,与原来的正半周信号组成脉动的直流信号;全波整流电路的直流信号经过压频转换电路,脉动直流信号频率转换为波动的电压值,作为反馈变量;反馈变量经过第一放大器放大后,分为并联的交流和直流分量,分别经过运放处理,调整大小,输入到加法器与控制信号源相加;经过调整的控制信号源经过驱动器作用在电机上;以上步骤循环进行。
4、本发明以硬件模拟电路作为电机控制系统,反馈信号通过硬件电路直接作用于输入端,使控制具有连续性,消除数字采样的离散误差,电机控制更精准、连续、稳定。且通过调整控制信号参数来控制电机的各项参数,控制变的更简单便捷,影响电机运动的因素减少。本发明还适用于不同类型的电机。
技术特征:
1.干涉仪电机匀速运动系统,其特征在于,包括:加法器、驱动器、干涉仪、全波整流电路、压频转换电路、第一放大器、电容、第二放大器、电阻、第三放大器;
2.依据权利要求1所述干涉仪电机匀速运动系统,其特征在于,
3.干涉仪电机匀速运动方法,其特征在于,包括如下步骤:
技术总结
本发明属于干涉电机控制技术领域。本发明提供了一种干涉仪电机匀速运动系统,包括:加法器、驱动器、干涉仪、全波整流电路、压频转换电路、第一放大器、电容、第二放大器、电阻、第三放大器;所述干涉仪包括干涉仪电机、激光探测器。本发明以硬件模拟电路作为电机控制系统,反馈信号通过硬件电路直接作用于输入端,使控制具有连续性,消除数字采样的离散误差,电机控制更精准、连续、稳定。且通过调整控制信号参数来控制电机的各项参数,控制变的更简单便捷,影响电机运动的因素减少。本发明还适用于不同类型的电机。
技术研发人员:梁学军,王巍,赵康,敖小强
受保护的技术使用者:北京雪迪龙科技股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!