应用于晶圆处理的磁悬浮装置及半导体加工设备的制作方法
本发明涉及磁悬浮,具体的是一种应用于晶圆处理的磁悬浮装置及半导体加工设备。
背景技术:
1、磁悬浮装置是一种利用磁场力将转子悬浮,使转子和定子之间没有任何机械接触的磁悬浮旋转驱动器。磁悬浮装置或磁悬浮旋转驱动器具有高洁净,无析出,无颗粒,无动密封,性能优越的特点,在生物化学、医疗、半导体制造等超纯净驱动领域具有良好的应用前景。
2、在半导体制造中,一方面,晶圆的洁净度很重要,因为晶圆表面的洁净度会影响后续半导体工艺及产品的合格率,为了达到超洁净的需要,硅或其他半导体材料的晶圆必须在受控的超清洁气氛中处理。比如,在晶圆的制造过程中,一个制造步骤是在离子注入掺杂之后对晶圆进行退火。掺杂在晶体结构上施加应变,如果应力不能得到快速释放,将导致离子掺杂的电阻率发生不希望的变化。目前,通常采用快速热处理工艺 (rt) 进行退火处理。再一方面,晶圆的处理均匀性很重要,为了产生均匀性,通常在处理晶圆时要围绕晶圆中心的垂直轴或z轴旋转晶圆。旋转还用于其他晶圆处理,例如化学气相沉积、热处理、离子注入掺杂和其他技术掺杂。为了满足半导体工艺制造中超洁净和处理均匀性等的严苛要求,半导体加工设备最佳采用无接触旋转驱动的磁悬浮装置。磁悬浮装置包括定子和转子,定子用于产生磁场以驱动转子及承载体旋转和悬浮。根据定子和转子两者的相对位置差异,可以分为内转子的磁悬浮装置和外转子的磁悬浮装置。
3、为了实现转子的稳定悬浮,必须给控制系统提供转子准确的位置信息。一般通过非接触式位移传感器技术来获得所需要的转子位置信息。目前,磁悬浮装置的位置传感器包括多个轴向传感器和多个径向传感器,位置传感器包括传感器探头,传感器探头沿径向或轴向安装到半导体加工设备的真空腔体上,真空腔体用于与半导体加工设备构成封闭腔体,以隔离转子和定子,使转子在封闭的真空腔体中旋转工作;然而,将位置传感器装配到真空腔体的腔壁及腔底上时,需要在真空腔体上形成通孔并使用密封圈进行密封;由于半导体加工设备的超洁净及高温环境要求,密封圈需要采用耐高温的氟胶密封圈(成本高),且在使用久时需要更换,这导致位置传感器装配成本较高,且位置传感器替换密封圈的安装过程工艺繁琐,存在传感器重新装配的标定及安装错误、密封不良等问题。另外,多个位置传感器的多个连接线缆分散在转子周围,连线杂乱,且不便于传感器线缆与传感器调理电路的设置及控制。
技术实现思路
1、为了克服现有技术中的缺陷,本发明实施例提供了一种应用于晶圆处理的磁悬浮装置及半导体加工设备,其用于解决以上问题中的至少一种。
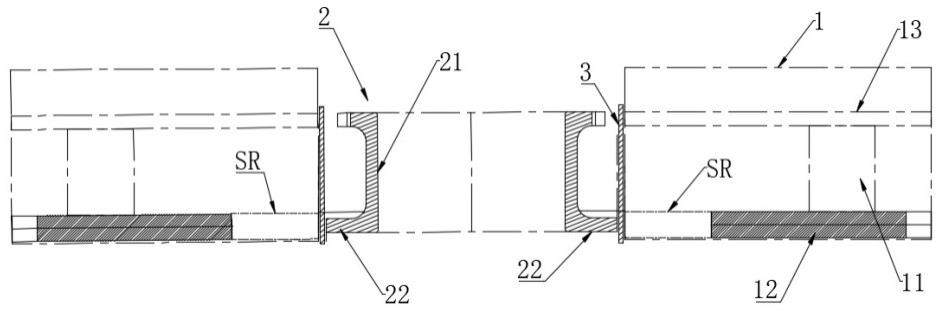
2、本公开实施例公开了一种应用于晶圆处理的磁悬浮装置,包括定子和转子,所述转子包括转子主体、自所述转子主体向所述定子延伸的第一环缘,所述定子包括永磁装置和第一悬浮控制组件,所述第一悬浮控制组件配置为向所述转子的第一环缘施加主动控制的悬浮力,所述永磁装置配置为向所述转子施加永磁偏置磁场,所述转子与所述定子之间具有腔壁,所述定子还包括至少一位置传感器,所述至少一位置传感器设置于所述定子内,且所述至少一位置传感器配置为透过所述腔壁并基于所述转子的第一环缘检测所述转子的至少一个自由度方向的位置信息。
3、本公开实施例还提供一种半导体加工设备,包括所述的磁悬浮装置。
4、本发明的有益效果如下:相对于现有技术中将转子位置检测与真空腔体集成,本发明将至少一位置传感器集成在定子内,借助转子的第一环缘,至少一位置传感器可透过腔壁检测转子的至少一个自由度方向(轴向或/和径向)的位置信息,从而实现转子位置检测与定子结构的有机结合。本发明实施例无需在真空腔体上制作通孔及使用氟胶密封圈,也无需再更换密封圈,解决装配传感器后重新标定及安装错误等问题,可以更好的满足半导体加工设备的超洁净及高温环境要求,且可以解决多个位置传感器的线缆连线杂乱的问题。
5、为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种应用于晶圆处理的磁悬浮装置,包括定子(1)和转子(2),所述转子包括转子主体(21)、自所述转子主体向所述定子延伸的第一环缘(22),所述定子包括永磁装置(11)和第一悬浮控制组件(12),所述第一悬浮控制组件配置为向所述转子的第一环缘施加主动控制的悬浮力,所述永磁装置配置为向所述转子施加永磁偏置磁场,其特征在于,所述转子与所述定子之间具有腔壁(3),所述定子还包括至少一位置传感器(sr),所述至少一位置传感器设置于所述定子内,且所述至少一位置传感器配置为透过所述腔壁并基于所述转子的第一环缘检测所述转子的至少一个自由度方向的位置信息。
2.根据权利要求1所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述第一悬浮控制组件配置为轴向悬浮控制组件,所述轴向悬浮控制组件包括沿轴向错层设置的第一控制组件(121)和第二控制组件(122),所述第一控制组件配置为向所述第一环缘施加沿轴向向上的悬浮力,所述第二控制组件配置为向所述第一环缘施加沿轴向向下的悬浮力;所述第一控制组件包括第一定子基片(1210)和自所述第一定子基片朝向所述第一环缘突出的多个第一定子磁极(1211),所述第一定子磁极上设有第一电磁绕组(1212),所述多个第一定子磁极在圆周方向上均匀设置;所述第二控制组件包括第二定子基片(1220)和自所述第二定子基片朝向所述第一环缘突出的多个第二定子磁极(1221),所述第二定子磁极上设有第二电磁绕组(1222),所述多个第二定子磁极在圆周方向上均匀设置;相邻的第一定子磁极和第二定子磁极之间或者相邻的两个第一定子磁极之间或者相邻的两个第二定子磁极之间形成第一磁极间隙(x1)。
3.根据权利要求2所述的应用于晶圆处理的磁悬浮装置,其特征在于,在圆周方向上,相邻的两个第一定子磁极之间设置一个第二定子磁极,且相邻两个第二定子磁极之间设置一个第一定子磁极,相邻的第一定子磁极和第二定子磁极之间形成所述第一磁极间隙。
4.根据权利要求3所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述位置传感器配置为用于检测所述转子的径向位移的径向传感器a(r1)和/或用于检测所述转子的轴向位移的轴向传感器a(z1),所述径向传感器a和/或所述轴向传感器a设于所述第一磁极间隙内。
5.根据权利要求4所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器a包括径向磁传感器元件(r11)和径向导磁体(r12),所述径向导磁体的一端与所述第一定子基片或/和所述第二定子基片连接,所述径向导磁体的相对的另一端朝向所述第一环缘,所述径向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上。
6.根据权利要求4所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴向传感器a包括两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体的一端与所述第一定子基片或/和所述第二定子基片连接,所述径向导磁体的相对的另一端朝向所述第一环缘,两个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上,且两个所述轴向磁传感器元件在轴向间隔设置。
7.根据权利要求4所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴向传感器a包括两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体的一端与所述第一定子基片或/和所述第二定子基片连接,所述径向导磁体的相对的另一端朝向所述第一环缘,所述径向导磁体朝向所述第一环缘的一端上形成有凹槽(z13),一个所述轴向磁传感器元件设于所述凹槽的顶面上,另一个所述轴向磁传感器元件设于所述凹槽的底面上,且两个所述轴向磁传感器元件在轴向间隔设置。
8.根据权利要求4所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器a与所述轴向传感器a设于同一第一磁极间隙内,形成轴径向传感器a(zr1)。
9.根据权利要求8所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器a(zr1)包括一个径向磁传感器元件(r11)、两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体的一端与所述第一定子基片或/和所述第二定子基片连接,所述径向导磁体的相对的另一端朝向所述第一环缘,所述径向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上;两个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上,且两个所述轴向磁传感器元件在轴向间隔设置。
10.根据权利要求8所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器a(zr1)包括一个径向磁传感器元件(r11)、两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体的一端与所述第一定子基片或/和所述第二定子基片连接,所述径向导磁体朝向所述第一环缘的一端上形成有凹槽(z13),一个所述轴向磁传感器元件设于所述凹槽的顶面上,另一个所述轴向磁传感器元件设于所述凹槽的底面上,且两个所述轴向磁传感器元件在轴向间隔设置;所述径向磁传感器元件设于所述凹槽朝向所述第一环缘的侧面上。
11.根据权利要求5所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述多个第一定子磁极的数量和所述多个第二定子磁极的数量均为4,形成8个所述第一磁极间隙;所述至少一位置传感器包括两个位置传感器对,每个所述位置传感器对包括两个所述位置传感器,每个所述位置传感器对的两个所述位置传感器设于径向对称的两个所述第一磁极间隙内,且两个所述位置传感器对相互正交设置。
12.根据权利要求3所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述位置传感器配置为用于检测所述转子的径向位移的径向传感器b(r2)和/或用于检测所述转子的轴向位移的轴向传感器b(z2),所述径向传感器b和/或所述轴向传感器b设于所述第一定子磁极或/和所述第二定子磁极处。
13.根据权利要求12所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器b包括径向磁传感器元件(r11),所述径向磁传感器元件设于所述第二定子磁极朝向所述第一环缘的一端的顶面上,或者所述径向磁传感器元件设于所述第一定子磁极朝向所述第一环缘的一端的底面上。
14.根据权利要求12所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴向传感器b包括轴向导磁体(z12)和两个轴向磁传感器元件(z11),所述轴向导磁体设于所述第二定子磁极朝向所述第一环缘的一端的顶面上,一个所述轴向磁传感器元件设于所述轴向导磁体背向所述第二定子磁极的一面上,另一个所述轴向磁传感器元件设于所述第二定子磁极朝向所述第一环缘的一端的底面上;或者,所述轴向导磁体设于所述第一定子磁极朝向所述第一环缘的一端的底面上,一个所述轴向磁传感器元件设于所述轴向导磁体背向所述第一定子磁极的一面上,另一个所述轴向磁传感器元件设于所述第一定子磁极朝向所述第一环缘的一端的顶面上。
15.根据权利要求12所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器b与所述轴向传感器b设于同一磁极处,形成轴径向传感器b(zr2)。
16.根据权利要求15所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器b包括一个径向磁传感器元件(r11)、两个轴向磁传感器元件(z11)和一个轴向导磁体(z12),所述轴向导磁体设于所述第二定子磁极朝向所述第一环缘的顶面上,所述轴向导磁体的一端朝向所述第一环缘,所述径向磁传感器元件设于所述轴向导磁体与所述第二定子磁极的交界处的端面上;一个所述轴向磁传感器元件设于所述轴向导磁体背向所述第二定子磁极的一面上,另一个所述轴向磁传感器元件设于所述第二定子磁极背向所述轴向导磁体的一面上。
17.根据权利要求12所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述多个第一定子磁极的数量和所述多个第二定子磁极的数量均为4;所述至少一位置传感器包括两个位置传感器对,每个所述位置传感器对包括两个所述位置传感器,每个所述位置传感器对的两个所述位置传感器设于径向对称的两个所述第一定子磁极或两个所述第二定子磁极处,且两个所述位置传感器对相互正交设置。
18.根据权利要求2所述的应用于晶圆处理的磁悬浮装置,其特征在于,每个第一定子磁极与一个第二定子磁极在轴向重叠。
19.根据权利要求18所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述位置传感器配置为用于检测所述转子的径向位移的径向传感器c和/或用于检测所述转子的轴向位移的轴向传感器c,所述径向传感器c和/或所述轴向传感器c设于所述第一磁极间隙内或/和所述第一定子磁极上或/和所述第二定子磁极上。
20.根据权利要求19所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器c与所述轴向传感器c设于同一第一定子磁极或同一第一磁极间隙处,形成轴径向传感器c(zr3)。
21.根据权利要求20所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器c设于所述第一磁极间隙处,所述轴径向传感器c包括一个径向磁传感器元件(r11)、两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体一端连接所述第一定子基片,所述径向导磁体的另一端朝向所述第一环缘,所述径向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上;一个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的顶面上,另一个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的底面上。
22.根据权利要求20所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器c设于所述第一定子磁极上时,所述轴径向传感器c包括一个径向磁传感器元件、两个轴向磁传感器元件,所述径向磁传感器元件设于所述第一定子磁极朝向所述第一环缘的一端的端面上;一个所述轴向磁传感器元件设于所述第一定子磁极朝向所述第一环缘的一端的顶面上,另一个所述轴向磁传感器元件设于所述第一定子磁极朝向所述第一环缘的一端的底面上。
23.根据权利要求19所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述多个第一定子磁极的数量为4或所述多个第二定子磁极的数量为4,所述至少一位置传感器包括两个位置传感器对,每个所述位置传感器对包括两个所述位置传感器,每个所述位置传感器对的两个所述位置传感器径向对称的设于两个所述第一定子磁极上或两个所述第二定子磁极上或两个所述第一磁极间隙内,且两个所述位置传感器对相互正交设置。
24.根据权利要求1所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述第一悬浮控制组件配置为径向悬浮控制组件(123),所述径向悬浮控制组件配置为向所述第一环缘施加沿径向的悬浮力;所述径向悬浮控制组件包括第三定子基片(1230)和自所述第三定子基片朝向所述第一环缘突出的多个第三定子磁极(1231),所述第三定子磁极上设有第三电磁绕组(1232),所述多个第三定子磁极在圆周方向上均匀设置;相邻的两个第三定子磁极之间形成第二磁极间隙(x2)。
25.根据权利要求24所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述位置传感器配置为用于检测所述转子的径向位移的径向传感器d和/或用于检测所述转子的轴向位移的轴向传感器d,所述径向传感器d和/或所述轴向传感器d设于所述第二磁极间隙内或/和所述第三定子磁极上。
26.根据权利要求25所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述径向传感器d与所述轴向传感器d设于同一第三定子磁极或同一第二磁极间隙处,形成轴径向传感器d(zr4)。
27.根据权利要求26所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器d(zr4)设于所述第二磁极间隙处,所述轴径向传感器d包括一个径向磁传感器元件(r11)、两个轴向磁传感器元件(z11)和径向导磁体(r12),所述径向导磁体一端连接所述第三定子基片,所述径向导磁体的另一端朝向所述第一环缘,所述径向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的端面上;一个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的顶面上,另一个所述轴向磁传感器元件设于所述径向导磁体朝向所述第一环缘的一端的底面上。
28.根据权利要求26所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述轴径向传感器d设于所述第三定子磁极上时,所述轴径向传感器d包括一个径向磁传感器元件(r11)和两个轴向磁传感器元件(z11),所述径向磁传感器元件设于所述第三定子磁极朝向所述第一环缘的一端的端面上;一个所述轴向磁传感器元件设于所述第三定子磁极朝向所述第一环缘的一端的顶面上,另一个所述轴向磁传感器元件设于所述第三定子磁极朝向所述第一环缘的一端的底面上。
29.根据权利要求24所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述多个第三定子磁极的数量为4,所述至少一位置传感器包括两个位置传感器对,每个所述位置传感器对包括两个所述位置传感器,每个所述位置传感器对的两个所述位置传感器径向对称的设于两个所述第三定子磁极上或两个所述第二磁极间隙内,且两个所述位置传感器对相互正交设置。
30.根据权利要求2-29所述的应用于晶圆处理的磁悬浮装置,其特征在于,所述定子还包括第二悬浮控制组件(13),所述第二悬浮控制组件配置为向所述转子施加径向的悬浮力,所述第二悬浮控制组件包括第四定子基片(130)、自所述第四定子基片向所述转子突出的多个第四定子磁极(131)及设于所述第四定子磁极上的第四电磁绕组(132),所述多个第四定子磁极在圆周方向上均匀设置,所述永磁装置包括多个永磁组件(111),所述多个永磁组件在圆周方向上均匀设置,所述多个永磁组件夹持于所述第一悬浮控制组件和所述第二悬浮控制组件之间。
31.一种半导体加工设备,其特征在于,包括权利要求1-30任一项所述的磁悬浮装置。
技术总结
本发明公开了一种应用于晶圆处理的磁悬浮装置及半导体加工设备,转子包括转子主体、自转子主体向定子延伸的第一环缘,定子包括永磁装置和第一悬浮控制组件,第一悬浮控制组件配置为向转子的第一环缘施加主动控制的悬浮力,永磁装置配置为向转子施加永磁偏置磁场,转子与定子之间具有腔壁,定子还包括至少一位置传感器,至少一位置传感器设置于定子内,且至少一位置传感器配置为透过腔壁并基于转子的第一环缘检测转子的至少一个自由度方向的位置信息。本发明无需在真空腔体上制作通孔及使用密封圈,解决了装配传感器后重新标定及安装错误等问题,可以更好的满足半导体加工设备的超洁净及高温环境要求。
技术研发人员:尹成科,段新颖
受保护的技术使用者:苏州苏磁智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!