一种永磁同步电机双模型参考无位置传感器控制方法与流程
本发明属于电力电子与电力传动,具体涉及一种永磁同步电机无位置传感器控制方法。
背景技术:
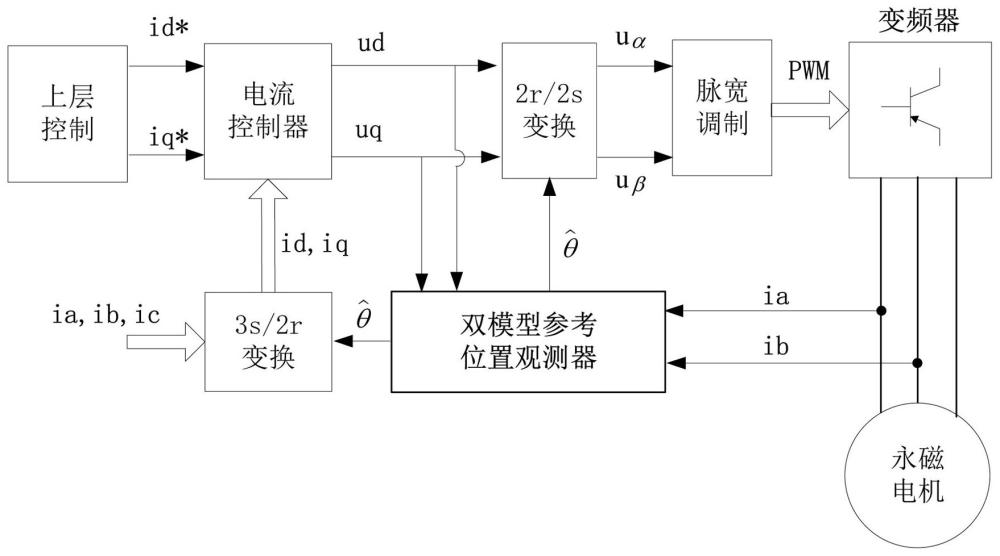
1、在电动车辆、船舶推进等领域,永磁同步电机得到广泛应用。矢量控制是永磁同步电机常用的控制方法,该方法通过3s/2r变换,将永磁同步电机交流量转换为直流量进行控制,通过电流控制器获得dq坐标系下的电压参考值,再通过2r/2s变换,得到αβ坐标系下的电压参考值。以此为基础,进行pwm调制,最终得到永磁同步电机的驱动信号。
2、这种控制方式需要获取永磁同步电机转子位置信号,一般安装旋变、码盘等位置传感器用于采集位置信号。
3、在一些特殊应用场合,无法安装位置传感器,则需要采用无位置传感器控制,通过位置观测器获取永磁同步电机转子位置信号。
技术实现思路
1、为实现高性能的永磁同步电机无位置传感器控制,本发明提出一种永磁同步电机双模型参考观测器无位置传感器控制方法,采用双模型参考观测器,能够提高无位置传感器控制的动态性能。
2、本发明解决其技术问题所采用的技术方案是:一种永磁同步电机双模型参考无位置传感器控制方法,首先构建由上层控制模块、电流控制器、3s/2r变换模块、2r/2s变换模块、脉宽调制模块和双模型参考位置观测器组成的永磁同步电机矢量控制系统,所述的双模型参考位置观测器包含位置可调模型、转速可调模型、位置自适应模块、转速自适应模块和积分器,其中位置可调模型作为转速可调模型的参考模型,转速可调模型作为位置可调模型的参考模型;然后将采样电机相电流ia、ib和ic通过3s/2r变换模块坐标变换得到交直轴电流id和iq,与交直轴电流给定电流和通过电流控制器得到矢量控制所需电压ud和uq;最后将电流控制器的输出ud、uq和采样电流ia、ib输入双模型参考位置观测器,输出观测位置对双模型参考位置观测器输出的观测位置分别进行3s/2r变换和2r/2s变换,获取永磁同步电机转子的位置信号。
3、进一步,所述的步骤s2具体为:
4、s21,将电流ia和ib输入位置可调模型,以上一周期的观测位置为可调参数计算ic=-ia-ib,再通过3s/2r变换模块进行坐标变换得到电流id和iq,计算公式为:
5、
6、s22,将电压ud和uq输入转速可调模型,以上一周期的观测转进为可调参数,通过状态方程计算和状态方程如下:
7、
8、s23,将电流id、iq和输入转速自适应模块和位置自适应模块中,转速自适应模块通过如下公式计算k3:
9、
10、k3经pi调节器之后得到ω,ω经积分器积分后得到
11、位置自适应模块通过如下公式分别计算k1和k2:
12、
13、
14、k2和k1的差经pi调节器后得到与位置自适应模块的输出相加,得到最终输出观测位置
15、本发明的有益效果是:本发明控制方法能够同时对转速和位置进行模型参考自适应观测,从而提高无位置传感器控制的动态性能。
技术特征:
1.一种永磁同步电机双模型参考无位置传感器控制方法,其特征在于:
2.根据权利要求1所述的一种永磁同步电机双模型参考无位置传感器控制方法,其特征在于,所述的步骤s2具体为:
技术总结
本发明公开了一种永磁同步电机双模型参考无位置传感器控制方法,以永磁同步电机矢量控制为基础,用双模型参考位置观测器获取永磁同步电机转子的位置信号;本发明用双模型参考位置观测器代替位置传感器,实现电机转子位置信号的采集,本发明方法与其他无位置传感器控制方法相比,具有转速和位置两套自适应模块,能够提高位置观测的动态性能,让永磁同步电机启动速度更快。
技术研发人员:朱磊,宋泽伟,邹应勤,宛野,解锦辉
受保护的技术使用者:武汉船用电力推进装置研究所(中国船舶集团有限公司第七一二研究所)
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!